
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
I figured it out! I was creating a new TransformListener each iteration of my loop. By only creating one TransformListener and reusing it for every call, I can now run my main loop as fast as I want. (With no forced delay, it runs at 300 hz!)
| | 2 | No.2 Revision |
I figured it out! I was creating a new TransformListener each iteration of my loop. By only creating one TransformListener and reusing it for every call, I can now run my main loop as fast as I want. (With no forced delay, it runs at 300 hz!)
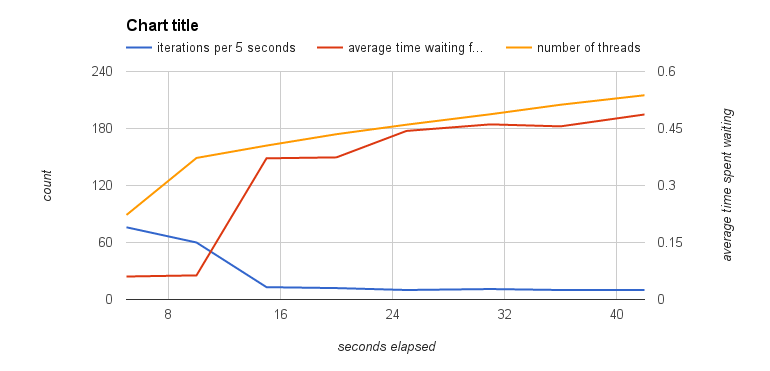
Just for fun, here's another graph. (yellow and blue use the left y-axis, red uses the right)
| | 3 | No.3 Revision |
I figured it out! I was creating a new TransformListener each iteration of my loop. By only creating one TransformListener and reusing it for every call, I can now run my main loop as fast as I want. (With no forced delay, it runs at 300 hz!)
Just for fun, here's another graph. graph of the problematic version. (yellow and blue use the left y-axis, red uses the right)
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.