
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
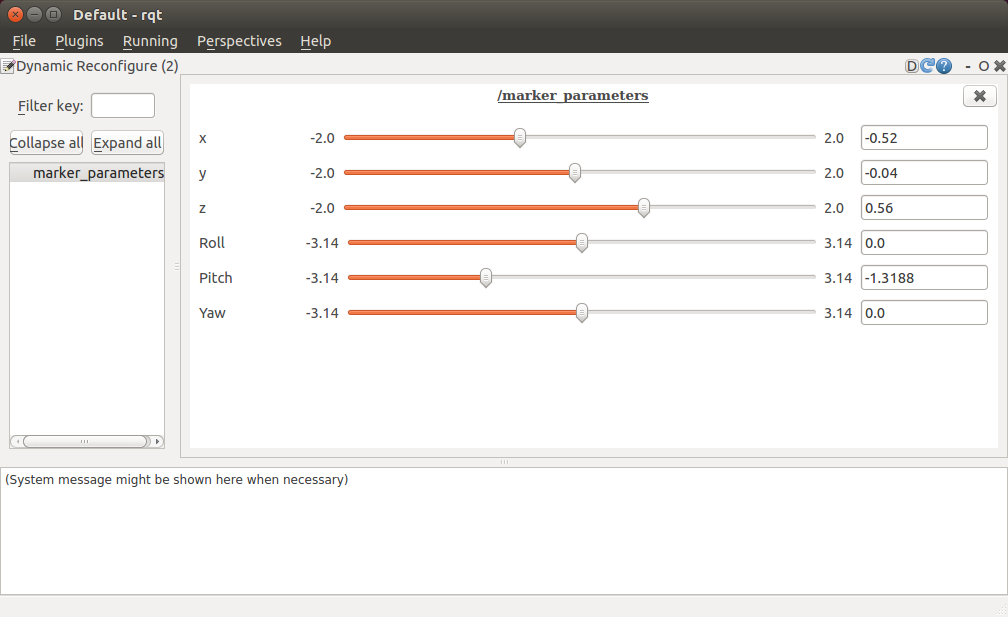
If you are looking for something like this :
this tutorial will help you:
http://wiki.ros.org/dynamic_reconfigure/Tutorials/UsingTheDynamicReconfigurePythonClient
it creates a server that will publish in a topic if a change is entered in rqt
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.

{kind=link}