
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
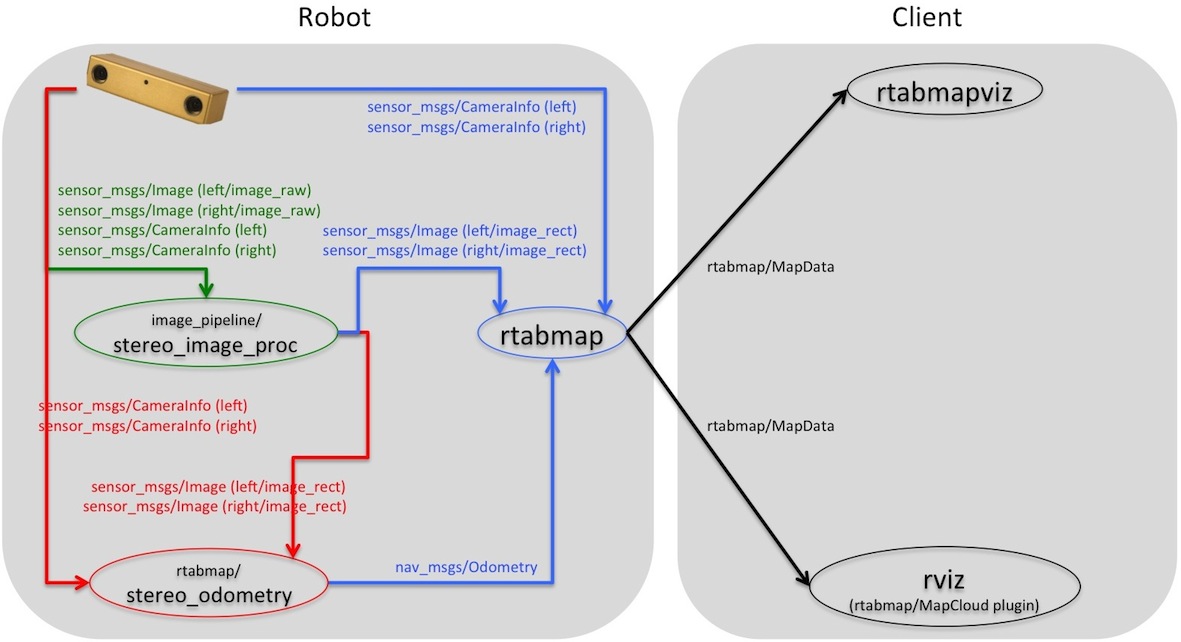
Yes it is possible, take a look at the 3.7 Stereo B section of your link above. You need to combine your odometry sources before connecting it to rtabmap (the blue link with nav_mgs/Odometry). The blue links over rtabmap node are used for loop closure detection and to generate the 3D point cloud.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
