
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
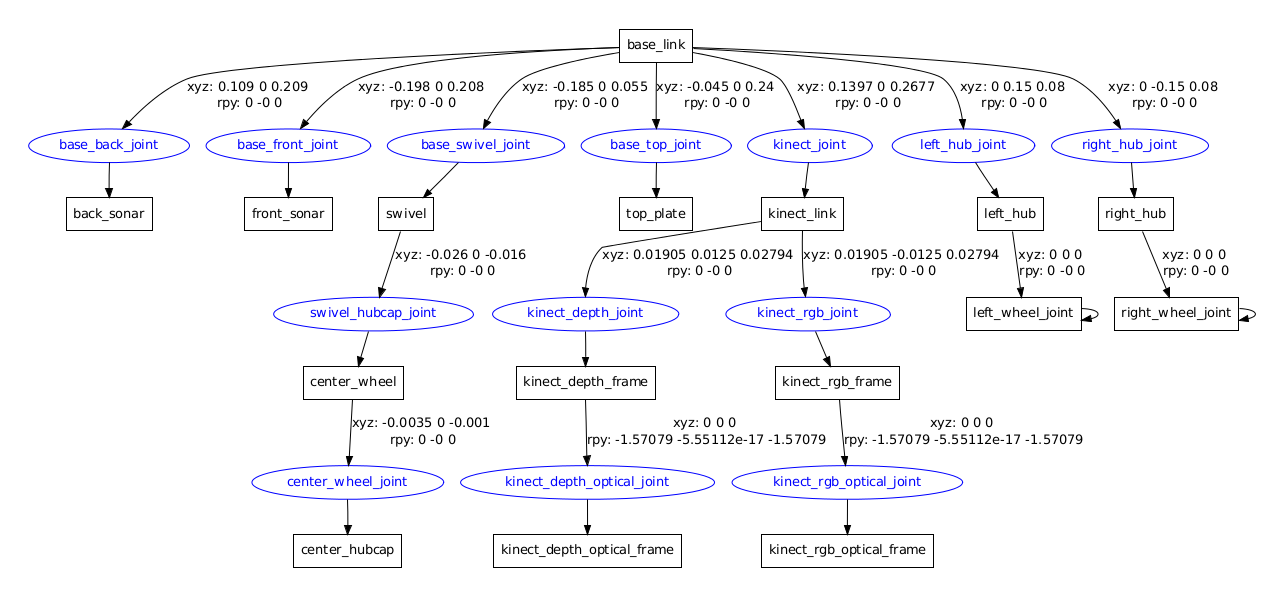
I edited pioneer3dx_body.xacro.
I changed the joint types of base_swivel_joint and swivel_hubcap_joint from continuous to fixed and it solved the same issues I had concerning the center wheel.
To check, I ran the following commands from the urdf wiki:
rosrun xacro xacro.py `rospack find p2os_urdf`/defs/pioneer3dx.xacro > pioneer3dx.urdf
check_urdf pioneer3dx.urdf
urdf_to_graphiz pioneer3dx.urdf
evince pioneer3dx.pdf
Which gave me this:
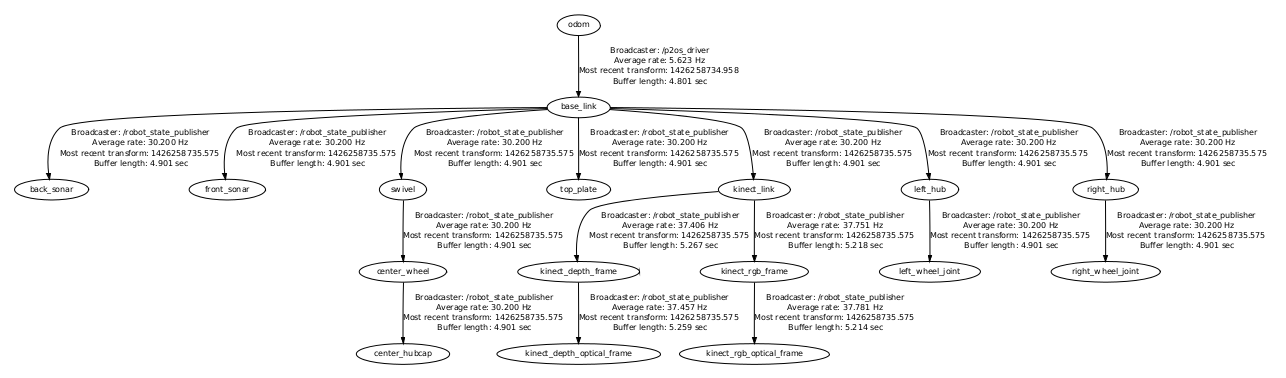
I then ran my robot and used the following commands to check the tf tree:
rosrun tf view_frames
evince frames.pdf
Which gave me this:
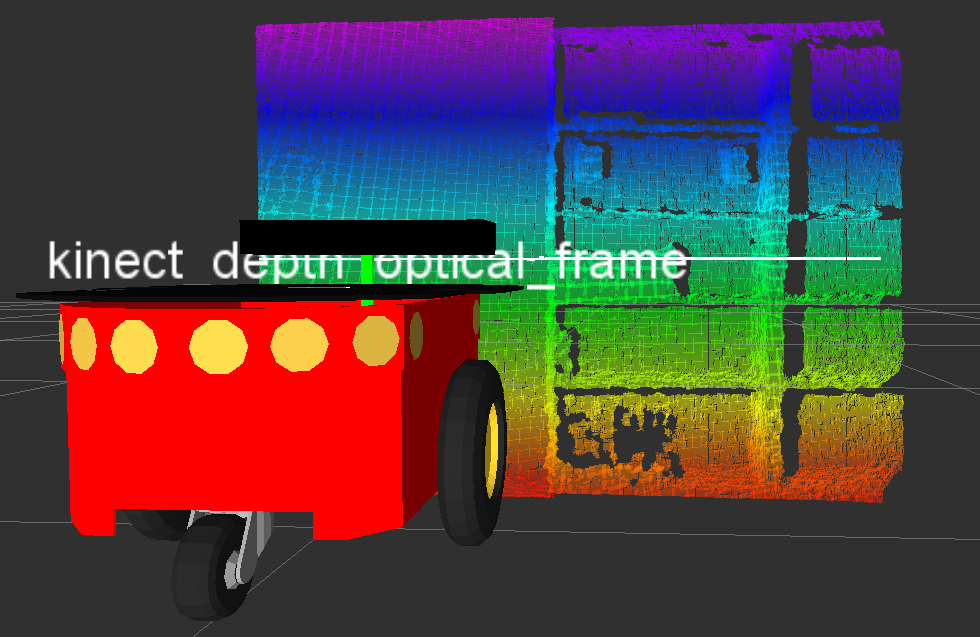
Checking RViz with Fixed Frame set to odom gave me this:
I'll send an email to the maintainer for the p2os repository and see if that is a good fix and have him make updates if they are.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
