
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
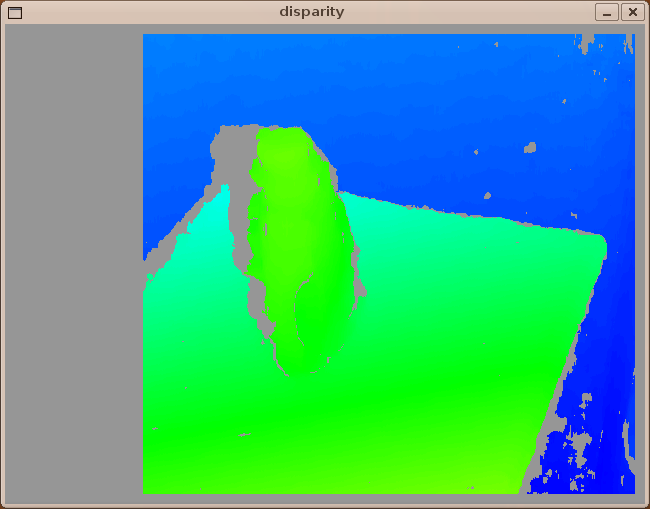
In my opinion, your stereo pair does not look well calibrated. The disparity image should show at least some structure. Could you tell me which was your score when you calibrated the stereo rig? The number that appears after the calibration is the reprojection error in pixels. A number below 0.6 or 0.4 is desirable.
The calibration should also show that a particular feature in the left image can be found in the same row in the right image. By visual inspection at your image pairs, these images are not correctly calibrated.
| | 2 | No.2 Revision |
In my opinion, your stereo pair does not look well calibrated. The disparity image should show at least some structure. Could you tell me which was your score when you calibrated the stereo rig? The number that appears after the calibration is the reprojection error in pixels. A number below 0.6 or 0.4 is desirable.
The calibration should also show that a particular feature in the left image can be found in the same row in the right image. By visual inspection at your image pairs, these images are not correctly calibrated.
As suggested by Stephan, use a rigid calibration pattern or glue that piece of paper to something rigid and flat. Now is looking better, but you should achieve a better calibration.
| | 3 | No.3 Revision |
In my opinion, your stereo pair does not look well calibrated. The disparity image should show at least some structure. Could you tell me which was your score when you calibrated the stereo rig? The number that appears after the calibration is the reprojection error in pixels. A number below 0.6 or 0.4 is desirable.
The calibration should also show that a particular feature in the left image can be found in the same row in the right image. By visual inspection at your image pairs, these images are not correctly calibrated.
As suggested by Stephan, use a rigid calibration pattern or glue that piece of paper to something rigid and flat. Now is looking better, but you should achieve a better calibration.
Try to follow this tutorial with your images. Your disparity image should look like this image looks in the tutorial. Which are your stereo params?
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.

{kind=link}