
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
I woud rotate the link between the laser and your robot's body 90 degrees on your URDF.
| | 2 | No.2 Revision |
I woud rotate the link between the laser and your robot's body 90 degrees on your URDF.
[UPDATE]
Yup... you have to rotate the link between the laser and the robot body by 90 degrees. See the following image:
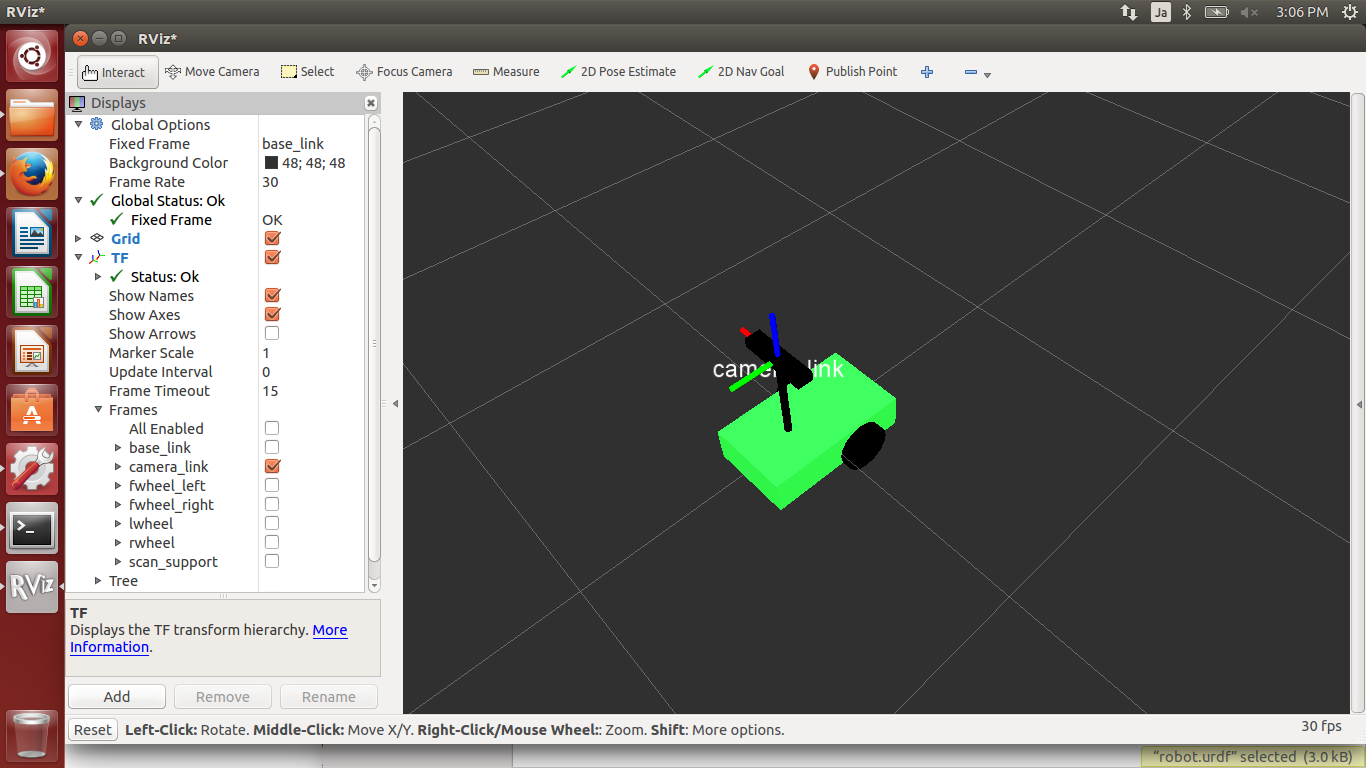
The red line (x direction) of the camera_link is pointing to the right side of the robot. It should be pointing to the front!
Try changing this in your URDF
...
<link name="camera_link">
<visual>
<geometry>
<box size="0.065 0.28 0.04"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
</link>
...
<joint name="base_to_scanner" type="fixed">
<parent link="base_link"/>
<child link="camera_link"/>
<origin xyz="0.10 0 0.455" rpy="0 0 0"/>
</joint>
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.