
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
I want to explain the relationship between *.yaml and *.pgm.
kinectF1.yaml.
image: /home/turtlebot/kinectF1.pgm resolution: 0.050000 origin: [-100.000000, -100.000000, 0.000000] negate: 0 occupied_thresh: 0.65 free_thresh: 0.196
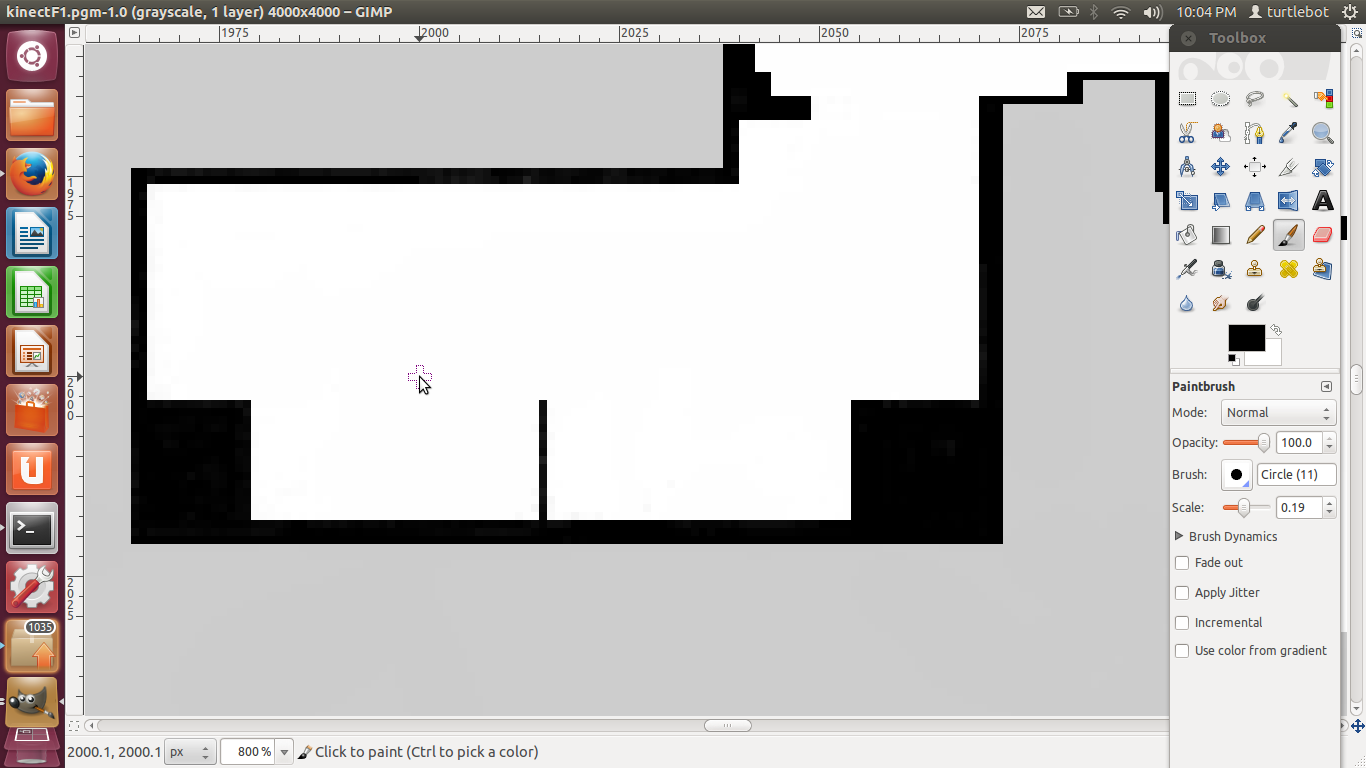
If you open kinectF1.pgm(4000x4000) with Gimp Image Editor, you will understand the relationship.
resolution in kinectF1.yaml means m/pixel.
0 on x-axis, 0 on y-axis and 0 theta is origin.
you can calculate origin in kinectF1.yaml by dividing -100.000000 by 0.05.
The result is -2000.
As the upper-right corner on kinectF1.pgm is origin,
2000 on Gimp is located at -2000 from origin.
If you understand above article, you can change origin.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
