The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |

| | 1 | initial version | |
Hi, I just tested it. Its working fine. Just check if both talker and listener are connected through the same topic "/chatter"
You can use below command to do that.
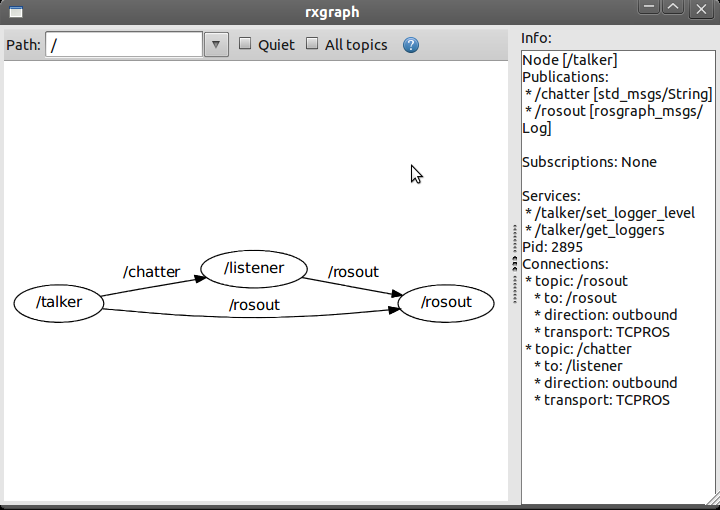
rxgraphThe graph should like below. If both are not connected then it means you are publishing and advertising in different topics.
Hope this helps, Karthik
| | 2 | No.2 Revision |
Hi, I just tested it. Its working fine. Just check if both talker and listener are connected through the same topic "/chatter"
You can use below command to do that.
rxgraphThe graph should look exactly like below. If both are not connected then it means you are publishing and advertising in different topics.
Hope this helps, Karthik
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
