
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
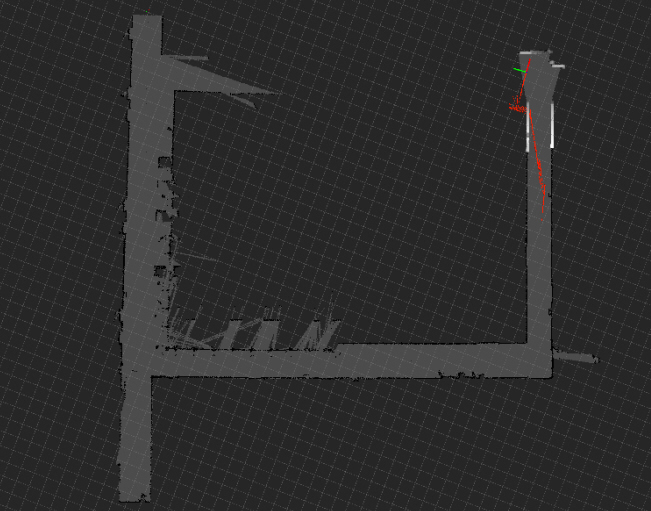
When I was deploying the laser scan parameters(angle resolution and scan frequency), I found the size of laser data array is wrong. If the array setting more than actual size, there would be always have wrong data for Gmapping. Otherwise, there would be memory error.
here is the result:
| | 2 | No.2 Revision |
When I was deploying the laser scan parameters(angle resolution and scan frequency), I found the size of laser data array is wrong. If the array setting more than actual size, there would be always have wrong data for Gmapping. Otherwise, there would be memory error.
here is the result:
result(the actual scene):
| | 3 | No.3 Revision |
When I was deploying the laser scan parameters(angle resolution and scan frequency), I found the size of laser data array is wrong. If the array setting more than actual size, there would be always have wrong data for Gmapping. Otherwise, there would be memory error.
here Here also solve the problem in: http://answers.ros.org/question/1270/shift-in-the-map-of-gmapping?comment=3132#comment-3132
Relate problem: http://answers.ros.org/question/1269/the-tf-between-map-and-odom-is-not-static?answer=2184#2184
This is the result(the actual scene):
I would like to thank dornhege, Brian Gerkey, dlaz, mbj and Ivan Dryanovski for help in finding out the problem.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.