The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2020-08-31 12:15:12 -0500 | received badge | ● Nice Question (source) |
| 2019-09-20 02:11:40 -0500 | received badge | ● Famous Question (source) |
| 2017-08-22 08:48:05 -0500 | received badge | ● Notable Question (source) |
| 2017-02-21 10:23:21 -0500 | received badge | ● Popular Question (source) |
| 2017-01-04 05:30:03 -0500 | asked a question | [rosdep] Incorrect dependency install order using manifests We recently switched some of our ROS development from a bunch of custom dependency install (bash) scripts to rosdep. Some of them we created proper .rdmanifest files for, including the However, the installation order doesn't work as expected. At the bottom is an example output, from adding an echo statement to each check presence script. We can see a couple of things from this:
What could be the cause of this? Let me know if you need more info. |
| 2016-11-08 13:26:40 -0500 | received badge | ● Famous Question (source) |
| 2016-11-08 13:26:40 -0500 | received badge | ● Notable Question (source) |
| 2016-11-08 13:26:40 -0500 | received badge | ● Popular Question (source) |
| 2015-05-13 01:51:19 -0500 | received badge | ● Enthusiast |
| 2015-05-07 05:35:30 -0500 | asked a question | Current robot state as CAD file / pointcloud Hey all I need to get the current state of the robot, including spatial description, as a CAD file or a pointcloud for further processing. Specifically, I need to get the complete 3D description of the complete URDF model, in the current state/joint configuration, in a format that PCL can use. I am not really sure how to do this, but I can see a partial solution, and would appreciate your feedback.
The question is how to merge this into one output in 4.? Or if there's an easier/more efficient solution that I've missed? Thanks. |
| 2014-10-10 21:13:24 -0500 | received badge | ● Famous Question (source) |
| 2014-08-25 04:35:20 -0500 | received badge | ● Notable Question (source) |
| 2014-08-05 04:27:03 -0500 | received badge | ● Self-Learner (source) |
| 2014-08-04 22:44:46 -0500 | received badge | ● Popular Question (source) |
| 2014-08-04 05:37:57 -0500 | answered a question | Local costmap not aligned with map Well.. This is awkward. Apparently the robot needed a good rest over the weekend, and the navigation is now working. I suspect I might have forgot to restart the computer at some point, even though I don't like to admit it. Marking as solved for now. |
| 2014-08-04 03:49:24 -0500 | answered a question | COLLADA from Sketchup is wrong colors Problem fixed when upgrading from Fuerte to Hydro. |
| 2014-08-01 08:08:52 -0500 | asked a question | Local costmap not aligned with map Sometime in March, possibly after upgrading to Hydro, navigation on our robot stopped working. It wasn't critical for our use at the time, but it is now. After investigating a bit, it seems like the problem is that the local costmap is not aligned with the static map, and thus the robot thinks it's in collision even when it's not. This is the output when sending a goal in such a situation: And this is how it looks in Rviz, when I visualize the local costmap. Clearly, something is wrong:
In the costmap_local config file, I have set the parameters exactly like they where before things went wrong, which is like it is in the tutorial as well. I tried changing to global_frame: map and static_map: true but that didn't work. I tried installing the 1.11.5 release of the navigation stack (instead of the current hydro version), but that didn't work either. Any help is appreciated! |
| 2014-01-28 17:22:38 -0500 | marked best answer | rosbag results in OSError Hello all, I'm trying to run this tutorial, but rosbag fails to record data. I tried both the specified instructions as well as recording a single topic but either results in the same error: I'm running ROS in OS X Lion, which I suppose is the problem, but I have no clue to the solution, so please advise. |
| 2013-04-23 14:24:44 -0500 | received badge | ● Famous Question (source) |
| 2013-03-18 23:48:47 -0500 | received badge | ● Famous Question (source) |
| 2013-01-04 09:23:30 -0500 | received badge | ● Notable Question (source) |
| 2012-12-08 20:01:49 -0500 | received badge | ● Notable Question (source) |
| 2012-11-06 08:41:02 -0500 | received badge | ● Notable Question (source) |
| 2012-10-30 16:57:39 -0500 | received badge | ● Popular Question (source) |
| 2012-09-12 13:02:54 -0500 | received badge | ● Self-Learner (source) |
| 2012-09-12 07:57:41 -0500 | answered a question | Can't remove added collision model Ok, I know have gotten a simple example to work. I discarded everything I had and wrote a simple Python node, that can successfully attach an object and remove it again. I guess it was indeed poor understanding of how the arm_navigation stack works, as it seems like the following is the procedure that works. For attaching:
For removing attached objects:
|
| 2012-09-12 03:47:14 -0500 | commented question | Can't remove added collision model Can you elaborate? I tried getting the current planning scene, and sending that one back, but with empty arrays for attached_collision_objects and collision_objects |
| 2012-09-11 16:14:26 -0500 | asked a question | Can't remove added collision model I am doing manipulation with the PR2, and have trouble with removing a collision model I added earlier. I realize that this might be because I don't fully comprehend how the arm_navigation stack works. I am adding the collision model of the picked object to the collision map, and subsequently adding it as an attached object. I have tried using the So I first add it by publishing a CollisionObject message on However, none of the following work for removal of the collision object after placing it: In terminal: In node: Even though this is the only ways to do it I could come across. It is still there in Rviz, and arm navigation fails, since the gripper has moved, and is now "in contact" with the attached object (which hasn't been removed). Obviously, restarting the arm navigation does the trick, but that shouldn't really be necessary, eh? |
| 2012-09-10 06:40:07 -0500 | commented question | COLLADA from Sketchup is wrong colors I have not tried that, no, it seemed like to much trouble at the time. In the meantime I've lived with the bad model colors (remember this is only for visuals), but I might check that out at some point. Thanks. |
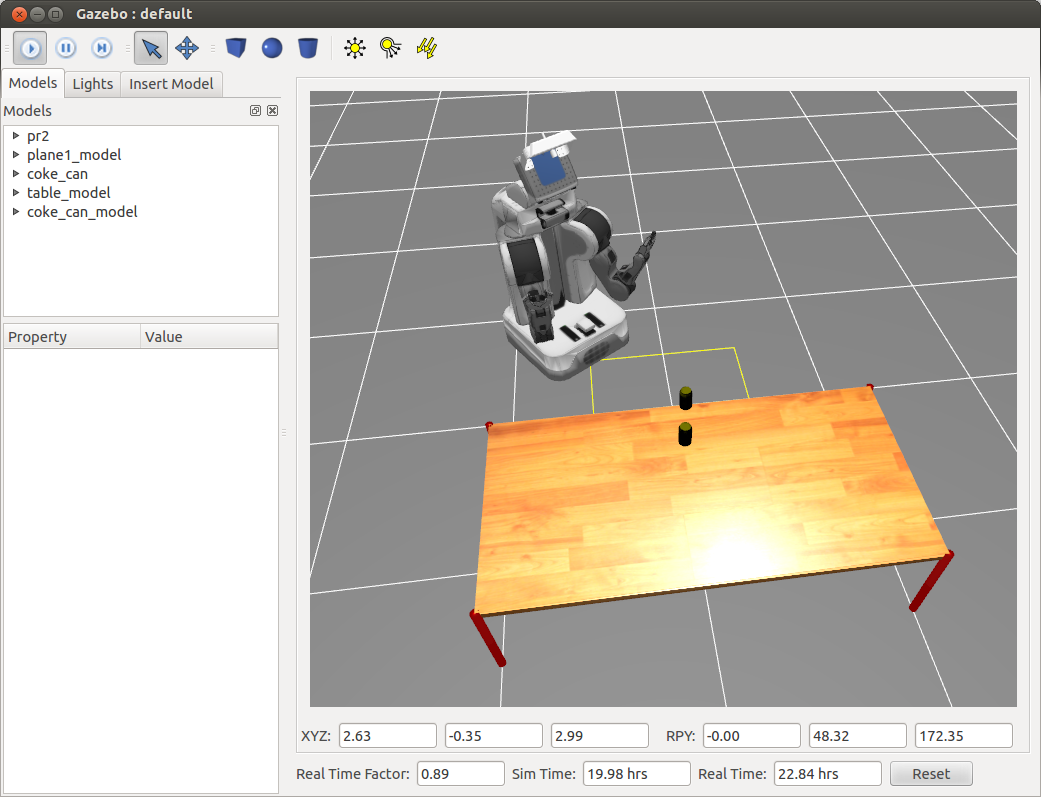
| 2012-09-10 06:36:13 -0500 | marked best answer | PR2 drifts over time in Gazebo This is more a curiosity than an actual problem. Yesterday morning, I started gazebo, and it ran smoothly throughout my work day (which is great, first time that happened). When I left, I forgot to turn of my workstation, and when I got back this morning, the PR2 had moved a little. Looking back, I remember noticing this towards the end of the day yesterday (simulation time approx 9-10 hours) as well, but didn't pay much attention to it. What is the reason for this? I haven't used a single node that has anything to do with the base. Attached is a screenshot of the current Gazebo state. The robot is supposed to be in front of the middle of the table (where the coke cans are).
|
| 2012-09-10 06:36:04 -0500 | commented answer | PR2 drifts over time in Gazebo I think it is indeed infinitesimal reaction forces that causes this, it's a common problem in explicit simulation. Worth noting if you're running a long simulation where the robot is supposed to be fixed at all times. |
| 2012-09-10 06:31:18 -0500 | commented answer | No connection to WG household_object_database oh, and obviously I did indeed write to Matei, and he did fix it |
| 2012-09-10 06:29:42 -0500 | marked best answer | No connection to WG household_object_database I'm following the guide on the wiki. I have installed the database on my desktop, which works fine. However, on the robot I would like to access the database remotely. I launch with $ roslaunch household_objects_database objects_database_remote_client.launch which seems fine. However, when calling one of the remapped services, I get return code 3. I've tried both ping grasp.willowgarage.com and telnet grasp.willowgarage.com 15432 which also work fine, so I guess it's not a network problem. The same error occurs on both the robot and my desktop. The issue is very similar (i.e. identical) to this one. UPDATE: I tried it from my home network as well, and there is still no connection, and still replies with error code 3. I'm surprised no one knows how to fix this. |
| 2012-09-10 06:29:40 -0500 | received badge | ● Commentator |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.