The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-09-01 13:17:54 -0500 | received badge | ● Taxonomist |
| 2018-09-24 22:10:10 -0500 | received badge | ● Famous Question (source) |
| 2018-07-31 17:25:49 -0500 | received badge | ● Notable Question (source) |
| 2018-07-30 17:51:12 -0500 | received badge | ● Popular Question (source) |
| 2018-07-05 00:04:01 -0500 | received badge | ● Enthusiast |
| 2018-07-04 03:53:47 -0500 | asked a question | catkin-pkg distribution was not found catkin-pkg distribution was not found Hi ROS-Community, I am using ubuntu 16.04 with ROS Kinetic build from source. To |
| 2016-06-27 08:41:06 -0500 | received badge | ● Famous Question (source) |
| 2015-10-12 07:58:50 -0500 | received badge | ● Notable Question (source) |
| 2015-10-12 07:58:50 -0500 | received badge | ● Popular Question (source) |
| 2015-08-06 02:10:45 -0500 | asked a question | actionlib goalhandle.cancel() blocking function? Hi, its quite some time, but I have a question related to the question It is maybe related to The implementation using the goal handles on client and server side works quite well for using multiple goals. I have a problem when canceling the goals. On the client side I use a for-loop iterating over the available goal handles (see below). For now, I cancel all goals, but later I just want to cancel a subset of the available goal handles. When I am doing this the for loop stops at the execution of the cancel() function. For my understanding this is threading problem. When the GoalHandle.cancel() function is executed. It executes the preemptCallback on the serve side, which will call the transistionCallback on the client side. I came to the conclusion that the GoalHandle.cancel() function is blocking until the server has finished the preemptCallback and the transistionCallback on the client side. Due to the usage of the goalsMutex in my code on the client side the transistionCallback can't be executed, so my programm hangs in a deadlock. I just want to know, why the GoalHandle.cancel() function is blocking. Shouldn't it be a non blocking funtion? Like the ActionClient.cancelAllGoals() function, which is a non blocking function. But when I use the ActionClient.cancelAllGoals() I can't tell on the server side that all goals shall be canceled, because I just receive one goal handle. Is there an option to detect on the server side if ActionClient.cancelAllGoals() has been called? Thanks for your help. Canceling the goal handles on the client side: Server Side PreemptCallback: The Transistion Callback: |
| 2015-08-06 01:37:52 -0500 | answered a question | Advanced actionserver usage Hi, I know the question has been asked a long time ago, but I am trying to implement an action server using multiple goals. I found this question and the answer very helpful, but now I am having some problems. The implementation by storing the goal handles and client and server side works quite well. On my client side I have a list of all GoalHandles currently used for (unsigned int i = 0; i < goalHandles.size(); ++i) { std::cout << "C1" << std::endl; goalHandles[eid].cancel(); std::cout << "C2" << std::endl; goalHandles[eid].reset(); std::cout << "C3" << std::endl; goalHandles.erase(eid); } |
| 2015-07-24 08:22:38 -0500 | received badge | ● Nice Question (source) |
| 2014-08-23 14:15:57 -0500 | received badge | ● Famous Question (source) |
| 2014-08-14 02:49:33 -0500 | commented question | ros indigo rviz performance displaying pointclouds 2x faster when compiled from_source Thanks for the links William. Seem to be related. |
| 2014-08-14 02:41:58 -0500 | commented answer | ros indigo rviz performance displaying pointclouds 2x faster when compiled from_source I performed the tests again, this time deleting the build and devel folder from the workspace. Same results as above. |
| 2014-08-13 23:04:09 -0500 | received badge | ● Good Question (source) |
| 2014-08-13 11:42:48 -0500 | received badge | ● Nice Question (source) |
| 2014-08-13 10:18:09 -0500 | received badge | ● Notable Question (source) |
| 2014-08-13 08:18:31 -0500 | commented question | ros indigo rviz performance displaying pointclouds 2x faster when compiled from_source I tried your suggestion. For results please look in my post above. Not much difference. Still faster than the repository, but as fast as without SSE optimizations turned on. |
| 2014-08-13 05:06:05 -0500 | received badge | ● Popular Question (source) |
| 2014-08-13 03:31:41 -0500 | received badge | ● Editor (source) |
| 2014-08-13 02:59:09 -0500 | commented answer | ros indigo rviz performance displaying pointclouds 2x faster when compiled from_source I compiled rviz again using BUILD_TYPE Release and RelWithDebInfo, both without SSE optimizations. I still get the performance of 30Hz on the desktop and 14Hz. I will prepare a table containing all builds tested and edit my post above in a second. |
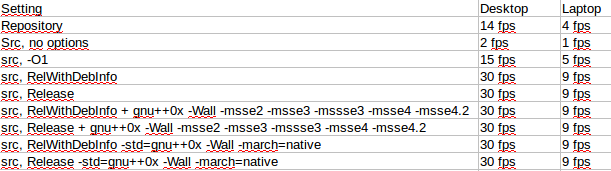
| 2014-08-13 01:44:07 -0500 | asked a question | ros indigo rviz performance displaying pointclouds 2x faster when compiled from_source Hi there, as we started migrating our code to indigo yesterday we had performance issues, especially when working with pointclouds. The code compiled with catkin_make runs just with 1Hz, whereas using rosbuild we achieve 30Hz. We found out, related to the following topic: http://answers.ros.org/question/71965... that we need to enable compiler optimization by setting catkin_make -DCMAKE_BUILD_TYPE=Release and the code runs at the expected framerate of 30Hz. Now to the topic: Displaying just a pointcloud from the asus xtion in rviz installed from the repository gives us a performance of 14Hz on our desktop.
Knowing the above (catkin compiled code runs 3x slower) we build rviz from source with the following compiler options:
This gives us a performance of 30Hz displaying a pointcloud, resulting in a much smoother usage of rviz. Evaluating the same on a laptop:
rviz from repository: 4Hz vs. rviz from source 9Hz EDIT I prepared a table containing all build tests I have done:
This leads to the question: Are the ros-indigo packages really compiled with compiler optimizations turned on e.g. as Release? Have a nice day! |
| 2012-09-07 06:05:50 -0500 | received badge | ● Famous Question (source) |
| 2012-09-07 06:05:50 -0500 | received badge | ● Notable Question (source) |
| 2012-08-28 09:47:24 -0500 | marked best answer | "Assertion `!pthread_mutex_lock(&m)' failed." runtime error while working with custom message and kinect Hi all, I'm working with the Microsoft Kinect. I'm using pointcloud_to_laserscan to retrieve a laserscan from kinect. And there is another node which retrieves the rgb image from kinect for feature extraction and advertises the features using a custom ros message on a topic called "features". Now I have another node. This node should subscribe to the pointcloud_to_laserscan and to the features topic using message_filters, because I need the laserscan and the features taken at the same time. I tried to use the tutorial on http://www.ros.org/wiki/message_filters I defined a sync policy: In the constructor of the node I initialize: My custom message is defined as: The code is compiling without errors, but when I try to run my node I get the following error: Anybody have an idea whats wrong? Thanks a lot! |
| 2012-08-28 09:47:16 -0500 | received badge | ● Student (source) |
| 2012-08-28 09:29:02 -0500 | received badge | ● Famous Question (source) |
| 2012-06-13 01:52:01 -0500 | received badge | ● Popular Question (source) |
| 2012-02-02 23:15:17 -0500 | received badge | ● Notable Question (source) |
| 2011-11-01 10:31:39 -0500 | received badge | ● Popular Question (source) |
| 2011-09-02 11:01:10 -0500 | marked best answer | roswtf communcation error bug in Ubuntu 11.04 No activity in > 1 month, closing |
| 2011-08-02 19:03:51 -0500 | answered a question | roswtf communcation error bug in Ubuntu 11.04 Hi, here the output of your script: |
| 2011-08-01 19:22:21 -0500 | asked a question | roswtf communcation error bug in Ubuntu 11.04 Hi there, I am using ros-diamondback on Ubuntu 11.04-64bit. I am launching the following launch file: In another terminal I run roswtf I tried to set ROS_IP and ROS_HOSTNAME by hand, but still the same error. The funny thing is, that there is no error. Everything works as expected. I can listen to the tf topic and receive data. Can anybody tell me, why roswtf thinks that there is an error? Thx |
| 2011-08-01 19:19:51 -0500 | answered a question | "Assertion `!pthread_mutex_lock(&m)' failed." runtime error while working with custom message and kinect Thanks for the replies. I changed the order of initialization as mentioned by Dariush and it worked. Thx again. |
| 2011-08-01 19:15:45 -0500 | marked best answer | "Assertion `!pthread_mutex_lock(&m)' failed." runtime error while working with custom message and kinect Do you see any warnings while compiling this code? I would expect some warnings about the order in which you are initializing your class members. In C++ member variables are initialized according the order of declaration, not the order you choose in the constructor. As you have declared the Sychronizer first, it's constructor will be called with uninitialized subscribers. That can cause all kind of nasticities, including the one you observed. cheers Dariush |
| 2011-08-01 19:15:45 -0500 | received badge | ● Scholar (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.