The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-06-27 10:20:47 -0500 | received badge | ● Famous Question (source) |
| 2023-06-27 10:20:47 -0500 | received badge | ● Notable Question (source) |
| 2022-11-07 14:10:17 -0500 | received badge | ● Famous Question (source) |
| 2022-11-07 14:10:17 -0500 | received badge | ● Notable Question (source) |
| 2022-08-02 11:55:02 -0500 | received badge | ● Famous Question (source) |
| 2022-08-02 11:55:02 -0500 | received badge | ● Notable Question (source) |
| 2022-06-15 08:54:47 -0500 | received badge | ● Famous Question (source) |
| 2022-06-15 08:54:47 -0500 | received badge | ● Notable Question (source) |
| 2022-06-15 08:54:47 -0500 | received badge | ● Popular Question (source) |
| 2022-04-07 02:35:48 -0500 | commented answer | Fanuc_driver_exp for robot with roboguide V9.10 Thank you! The driver works fine for me. |
| 2022-04-05 04:03:02 -0500 | commented answer | Fanuc_driver_exp for robot with roboguide V9.10 Thanks, this would be great! I send you an e-mail with my contact information to your CoR adress. The main problem is, |
| 2022-04-05 00:52:15 -0500 | commented answer | Fanuc_driver_exp for robot with roboguide V9.10 I think it is not a problem with write permissions in the directories. Rossum works perfectly with absolut path specific |
| 2022-04-05 00:39:00 -0500 | commented answer | Fanuc_driver_exp for robot with roboguide V9.10 I think it is not a problem with write permissions in the directories. Rossum works perfectly with absolut path specific |
| 2022-04-04 08:30:34 -0500 | commented answer | Fanuc_driver_exp for robot with roboguide V9.10 Now, I run into the same trouble. It is not possible for my to compile the driver for controller version 9.10-1 by mysel |
| 2022-02-10 14:33:50 -0500 | received badge | ● Teacher (source) |
| 2022-02-10 14:33:50 -0500 | received badge | ● Self-Learner (source) |
| 2022-02-10 11:52:00 -0500 | received badge | ● Popular Question (source) |
| 2022-02-10 07:25:42 -0500 | marked best answer | Get used time for planning path Hi! Is there a python command of the moveit_commander lib to get the used (!) planning time for the last planning? Perhaps the time is also stored in the result of the "plan" command? At the moment I have identified the following information in the results: Is there an overview of the structure of the "plan" result? Thanks in advance! nico |
| 2022-02-10 07:25:37 -0500 | answered a question | Get used time for planning path I found the solution by myself after some study of the planning results array... It is much more simple as I expected: |
| 2022-01-13 07:15:07 -0500 | asked a question | Get used time for planning path Get used time for planning path Hi! Is there a python command of the moveit_commander lib to get the used (!) planning |
| 2021-12-14 06:47:40 -0500 | commented answer | Planning in turned static frame fails I am working with the FANUC models from ROS industrial package. For FANUC robots base is the origin of the "world coordi |
| 2021-12-14 06:45:05 -0500 | received badge | ● Popular Question (source) |
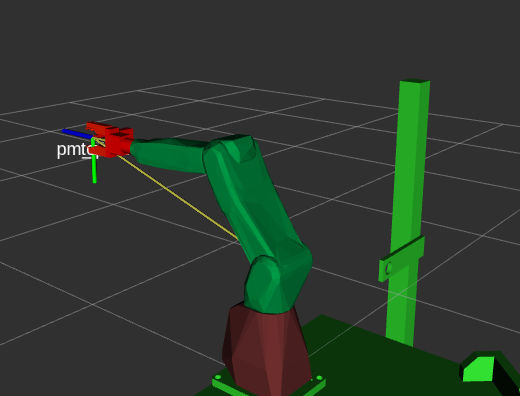
| 2021-12-09 01:04:07 -0500 | marked best answer | Planning in turned static frame fails For an application I am planning in different static frames (tf2). On the first screenshot you see an example frame, named pm_slot2. By using the command
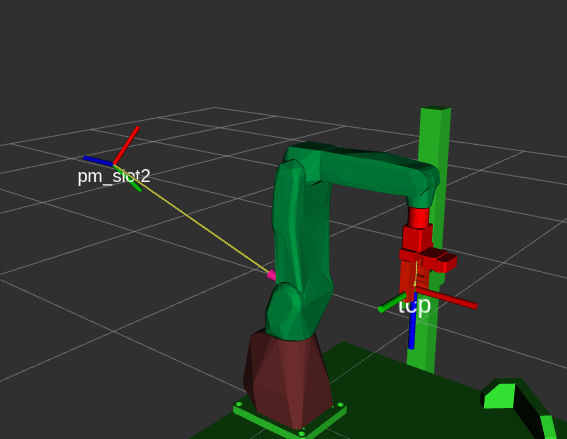
But if I turn the frame like in the next screenshot, the planning fails. I am 100% sure, the pose is possible for the robot (like in first screenshot but tool turned 45 degrees).
For the orientation of the pose_target in quaternions I am using both times 0,0,0,1 (qX, qY, qZ, qW). Whats going wrong? Any ideas? Thanks in advance! nico |
| 2021-12-09 01:04:02 -0500 | answered a question | Planning in turned static frame fails Finally, I found the solution. I had to transform my target to the pm_slot2 frame. It was just one line of code: target |
| 2021-12-03 08:31:09 -0500 | received badge | ● Popular Question (source) |
| 2021-12-02 08:37:33 -0500 | commented question | Planning in turned static frame fails [...] and can you tell me why the arrow link is starting from 2 Joint? Sorry, I do not fully understand this ques |
| 2021-12-02 08:36:48 -0500 | edited answer | Planning in turned static frame fails please delete me |
| 2021-12-02 08:36:36 -0500 | edited answer | Planning in turned static frame fails Wrong answer... please delete |
| 2021-12-02 08:35:44 -0500 | commented question | Planning in turned static frame fails [...] and can you tell me why the arrow link is starting from 2 Joint? Sorry, I do not fully understand this ques |
| 2021-12-02 08:35:25 -0500 | answered a question | Planning in turned static frame fails [...] and can you tell me why the arrow link is starting from 2 Joint? Sorry, I do not fully understand this ques |
| 2021-12-02 08:35:25 -0500 | received badge | ● Rapid Responder (source) |
| 2021-12-02 08:17:24 -0500 | commented question | Planning in turned static frame fails The position of the pm_slot2 frame is in both screenshots the same, but the orientation is different. In the second scre |
| 2021-12-02 06:57:39 -0500 | marked best answer | How to attach objects in robot state I am planning a robot motion in two steps. So I can modify the boundary conditions of the target pose of the first step (orienation of gripper), if the planning of step two fails (bring part to target pose). Background is to handle parts of high varity in geometry without teaching. In a first development step I planned AND executed the steps subsequently. All motions worked fine and there were no collisions. Now, I observe some collisions in the second step in RViz but the motion is executed without recognition of the collision. Furthermore all of the end poses are correct. Planning algorithm is the same. Some background info of my code: I plan the first motion in classic way with If After this the planning follows WITH attached part and if Do I overlook something? Do I have to update somethin else? As usual, thanks in advance! |
| 2021-12-02 06:57:30 -0500 | answered a question | How to attach objects in robot state After long hours of puzzling over the problem I found a working solution. Perhaps it is not the most elegant solution bu |
| 2021-12-02 06:57:30 -0500 | received badge | ● Rapid Responder (source) |
| 2021-12-02 06:25:35 -0500 | asked a question | Planning in turned static frame fails Planning in turned static frame fails For an application I am planning in different static frames (tf2). On the first sc |
| 2021-12-02 01:38:43 -0500 | edited question | How to attach objects in robot state Planning of motion in two steps leads to collisions I am planning a robot motion in two steps. So I can modify the bound |
| 2021-12-01 08:52:56 -0500 | commented question | How to attach objects in robot state One more comment... I think it is definitv a problem of an incomplete definition of the robot_state msg. The command ro |
| 2021-12-01 07:50:50 -0500 | commented question | How to attach objects in robot state print(tubehandling.scene.get_attached_objects()) shows the attached object correctly in the second planning. |
| 2021-12-01 04:56:11 -0500 | commented question | How to attach objects in robot state It was possible for me to pinpoint the fault more. With the MotionPlanning - Trajectory Slider in RViz I recognized that |
| 2021-12-01 01:45:45 -0500 | asked a question | How to attach objects in robot state Planning of motion in two steps leads to collisions I am planning a robot motion in two steps. So I can modify the bound |
| 2021-11-15 06:26:12 -0500 | marked best answer | Settings for max velocity and acceleration not effected at real FANUC robot I am using the the python commands This works finse in a simulation only environment in RViz accordingly to the joint limits defined in the file Thanks in advance! nico |
| 2021-11-15 06:26:10 -0500 | commented answer | Settings for max velocity and acceleration not effected at real FANUC robot Thanks for de detailed answer! This helps me a lot to understand the system better. |
| 2021-11-15 06:26:10 -0500 | received badge | ● Commentator |
| 2021-11-11 08:26:15 -0500 | marked best answer | ROS node which broadcasts periodically frames getting from python? Hi! Is there a ROS node which I can send with python a frame similar to the addTf() command and the node broadcasts this frame all the time? I want to create, modify and delete frames in one program run/sequenze without broadcast it periodically by myself. So the static_transform_publisher is not the right choice for me.
Thanks in advance! nico |
| 2021-11-11 08:26:06 -0500 | received badge | ● Popular Question (source) |
| 2021-11-11 08:26:01 -0500 | received badge | ● Famous Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.