The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2018-01-08 16:07:48 -0500 | received badge | ● Notable Question (source) |
| 2017-06-27 13:40:58 -0500 | received badge | ● Popular Question (source) |
| 2016-08-14 01:55:37 -0500 | marked best answer | Autonomous Navigation of ROS through rviz I am new to ROS. So, I have some simple doubts. 1. If multiple goals is set through rviz window, then which goal Robot will take to move? 2.If 2D Pose Estimate button doesn't work properly, then will the 2D Nav Goal somehow manage to move towards the goal? 3. After starting the autonomous navigation, can the teleop operation be started again? Is there any procedure? 4. What should global_frame and robot_base_frame for local_costmap_params.yaml and global_costmap_params.yaml? Thanks for your time. |
| 2016-08-10 21:37:59 -0500 | received badge | ● Famous Question (source) |
| 2016-08-01 13:28:43 -0500 | received badge | ● Famous Question (source) |
| 2015-08-26 03:32:04 -0500 | received badge | ● Taxonomist |
| 2015-06-18 05:10:15 -0500 | received badge | ● Notable Question (source) |
| 2015-05-07 11:26:04 -0500 | asked a question | Dynamic Scene Understanding Dear ALL, Is there any ROS package that handles dynamic scene understanding or which can annotate different dynamic obstacles appeared in the field of view of the sensor mounted on the robot? Thanks! |
| 2015-04-13 04:01:51 -0500 | received badge | ● Notable Question (source) |
| 2015-03-25 12:36:12 -0500 | received badge | ● Popular Question (source) |
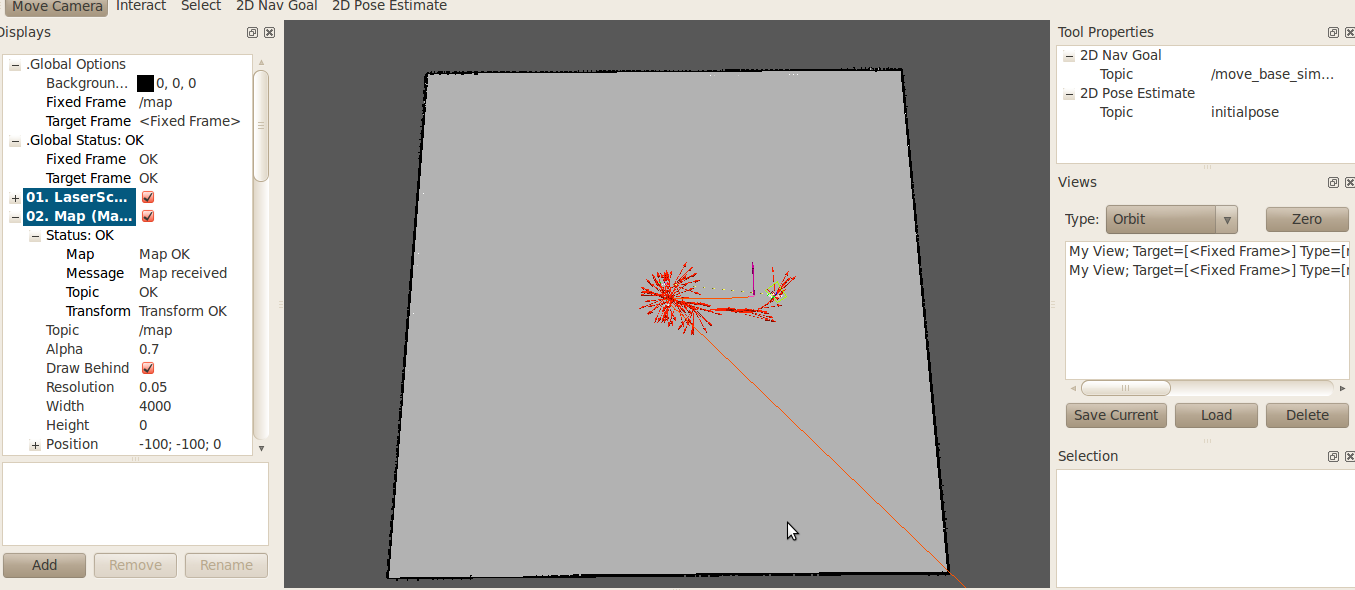
| 2015-02-12 09:39:11 -0500 | asked a question | Problem in setting new goal for the global planner. Hi, I want to set a new goal in the planner through the modified [navfn_ros.cpp] ( http://docs.ros.org/api/navfn/html/na... ). My intention is to bypass the goal that is being set using rviz. I have added following line at line numbers (412,413 and 416) ; map_goal[0] = -3.00001; // given by me map_goal[1] = -.88001; // given by me planner_->setGoal(map_goal); But the new goal is not treated as a goal, robot follows the goal set by rviz. (see the figure below)
I am using ROS fuerte. Thank you in advance. strong text |
| 2015-02-07 07:58:01 -0500 | received badge | ● Enthusiast |
| 2015-02-04 13:54:44 -0500 | received badge | ● Famous Question (source) |
| 2015-02-04 05:20:29 -0500 | commented answer | How does Dijkstra's algorithms work inside navfn? @Martin thanks. But, currently I have to use that one. |
| 2015-02-03 20:47:08 -0500 | received badge | ● Notable Question (source) |
| 2015-02-03 08:54:51 -0500 | commented answer | How does Dijkstra's algorithms work inside navfn? @Stefan, I have updated the question according to your suggestion. Please have a look. |
| 2015-02-03 08:54:51 -0500 | received badge | ● Commentator |
| 2015-02-03 08:53:55 -0500 | received badge | ● Popular Question (source) |
| 2015-02-03 06:49:27 -0500 | asked a question | How does Dijkstra's algorithms work inside navfn? Hi, I have gone through this and this as well . Can someone explain how the global path planner works in details? EDIT: According to your suggestion, I have visited NavfnROS and navfn. In navfn_ros.cpp, line number 197 , we have makePlan () method defined which calls calcNavFnDijkstra(true) line 285. This calcNavFnDijkstra(true) is defined here, line number 290. It uses propNavFnDijkstra(std::max(nx*ny/20,nx+ny),atStart); 00302 00303 // path 00304 int len = calcPath(nx*ny/2); END I want to remove only Dijkstra's algorithm; I don't want to change the costmap generation, cell updation, obstacle avoidance I know what is a potential field, but how it is used here; I have no idea. How does gradient line 989 help us in making the global plan? I am using ROS fuerte. |
| 2015-02-03 05:38:09 -0500 | received badge | ● Popular Question (source) |
| 2015-01-30 08:08:16 -0500 | commented answer | Eclipse debugging in ROS Can I debug a particular package instead of the whole node in Eclipse? Suppose, I want to debug navfn, instead of debugging a move_base node? |
| 2015-01-30 06:21:20 -0500 | asked a question | Want to know Navfn working in details! Hi, I want to change navfn package by modifying the plan method it uses. Can you explain: I am using ROS fuerte and Ubuntu 10.04 Thanks.. |
| 2014-04-24 01:16:53 -0500 | received badge | ● Famous Question (source) |
| 2014-04-15 08:46:24 -0500 | received badge | ● Famous Question (source) |
| 2014-01-30 11:07:36 -0500 | received badge | ● Notable Question (source) |
| 2014-01-28 06:03:45 -0500 | commented answer | Sending goal to Navigation stack using simple_navigation_goals @Marcus I get some warnings and errors as above. When we set 2D Nav goal through rviz, then 3 things appear in the terminal position (3 tuple),orientation (4 tuple) and angle. Does orientation in the code and this has anything common in between them. I try to achieve same goal through code as we do in rviz. Thank you.. |
| 2014-01-28 05:57:05 -0500 | commented answer | Sending goal to Navigation stack using simple_navigation_goals [ERROR] [1390980336.654648784]: Quaternion has length close to zero... discarding as navigation goal [ WARN] [1390980854.732553329]: Could not get robot pose, cancelling reconfiguration [ WARN] [1390980855.533396832]: Costmap2DROS transform timeout. Current time: 1390980855.5334, global_pose stamp: 1390980832.2348, tolerance: 0.3000 [ERROR] [1390980855.642393966]: Extrapolation Error looking up robot pose: Unable to lookup transform, cache is empty, when looking up transform from frame [/base_footprint] to frame [/map] |
| 2014-01-23 18:18:44 -0500 | commented answer | Is there a good way to verify my odometry data is sensible? @raphael favier, Can you please elaborate how teleop can be used to check odometry? In rviz there is no affect of teleop i.e we don't know to which co-ordinate it's moving? |
| 2014-01-23 17:57:11 -0500 | commented answer | Sending goal to Navigation stack using simple_navigation_goals Thanks @Marcus |
| 2014-01-22 19:14:24 -0500 | commented answer | Is there a good way to verify my odometry data is sensible? Where you get the decay time? In which file it resides? |
| 2014-01-22 17:14:22 -0500 | received badge | ● Student (source) |
| 2014-01-22 17:12:28 -0500 | asked a question | Tracking the robot position while using Teleop Hi, In rviz, whenever we click somewhere in the middle of the window it gives the goal co-ordinate postion where the robot should move. In teleop (I am using brown_remotelab), suppose we move to a particular position. Is there any mechanism to know the co-ordinate position of the robot? Since rviz has nothing to do with teleop. |
| 2014-01-22 17:03:09 -0500 | received badge | ● Popular Question (source) |
| 2014-01-22 05:34:33 -0500 | commented answer | Sending goal to Navigation stack using simple_navigation_goals @Marcus, thanks for the code. I observe that you have changed three things with respect to conventional simple_navigation_goals.cpp apart from adding the constructor. 1. map, have you faced any problem base_link? 2. Instead of meters, you used x and y co-ordinate. 3. If I choose 0 for angle does it move straight? How angle property will behave? |
| 2014-01-22 02:11:34 -0500 | edited question | Sending goal to Navigation stack using simple_navigation_goals I have gone through the tutorial where goals has been sent to navigation stack through simple_navigation_goals. My question is using simple_navigation_goals, we can move a robot 1 meter forward, is there any provision in the package to move to a particular goal location (x,y)? |
| 2014-01-21 23:51:38 -0500 | received badge | ● Notable Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.