The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2018-10-11 16:19:14 -0500 | marked best answer | setting up a tf for SICK Laser Scanner PLS101-312 Hi, I am currently working with a 2d laser scanner (PLS101-312). There are no registered drivers available for this device in the ROS repositories. however, following this answer, I was able to find a fork on git here, which works pretty fine on the device I am working on. I could also see the stream of laser data using My question here is, How can I view the laser scan data on rviz? When tried the /scan topic on rviz, I get an error saying that the frame for laser_scanner cannot be /world, the example here shows that it is being set to a base_laser. how can I do the same? I am aware that, there should be a tf for my laser_scanner, what would be the simplest way of setting up a tf for the laser, just for testing the laser scanner output? please suggest, some Ideas. Thanks again, Murali |
| 2018-09-15 17:13:11 -0500 | received badge | ● Enlightened (source) |
| 2018-09-15 17:13:11 -0500 | received badge | ● Guru (source) |
| 2017-03-11 01:05:31 -0500 | received badge | ● Nice Answer (source) |
| 2016-08-07 12:15:12 -0500 | received badge | ● Great Answer (source) |
| 2016-05-27 03:39:23 -0500 | received badge | ● Good Answer (source) |
| 2015-07-02 06:12:54 -0500 | received badge | ● Famous Question (source) |
| 2015-07-01 10:47:13 -0500 | received badge | ● Famous Question (source) |
| 2015-03-30 05:59:16 -0500 | received badge | ● Taxonomist |
| 2015-02-26 08:20:19 -0500 | commented question | Publishing/Subscribing from/to Qt GUI to ROS I was not able to find a solution with qt and C++; so I switched over to GLADE+gtk+python for GUI development, it is relatively simpler to understand and quicker to code. There are some issues with this method too ( ~ similar to the one mentioned above); will post the link shortly. |
| 2015-02-26 08:13:22 -0500 | received badge | ● Famous Question (source) |
| 2015-02-03 00:34:03 -0500 | received badge | ● Nice Answer (source) |
| 2015-01-21 21:56:17 -0500 | received badge | ● Famous Question (source) |
| 2015-01-18 03:09:36 -0500 | received badge | ● Famous Question (source) |
| 2015-01-16 14:03:29 -0500 | received badge | ● Nice Answer (source) |
| 2015-01-08 10:02:50 -0500 | marked best answer | raspberry pi with ROS Indigo ( or any new Release of ROS) Hi ROS Users, The ROS community has grown tremendously over the last 2 years, and it is good to be part of this growing community. Previously I tried to install ROS (Groovy) on Raspberry Pi using this tutorial and it was successful (Debian installation). I also understand that there is Hydro Installation (installation from Source) which requires lot of time for compilation. So now My questions are,
it is also much appreciated if someone can give pointers to a debian installation of Hydro on Raspberry pi. Thanks again, and thanks to the whole community, Best Regards, Murali |
| 2015-01-06 06:39:31 -0500 | received badge | ● Notable Question (source) |
| 2015-01-05 03:18:11 -0500 | marked best answer | about packages and ros distributions Hi, earlier during the times of
these are lot of questions, under one heading. But, I somehow feel these tasks will be a little tricky when handling several packages of different build structure for many ROS users. Awaiting response from experienced users. Thanks and Regards, Murali EDIT: for example let us consider these packages here and this one here. |
| 2014-12-18 08:43:18 -0500 | received badge | ● Popular Question (source) |
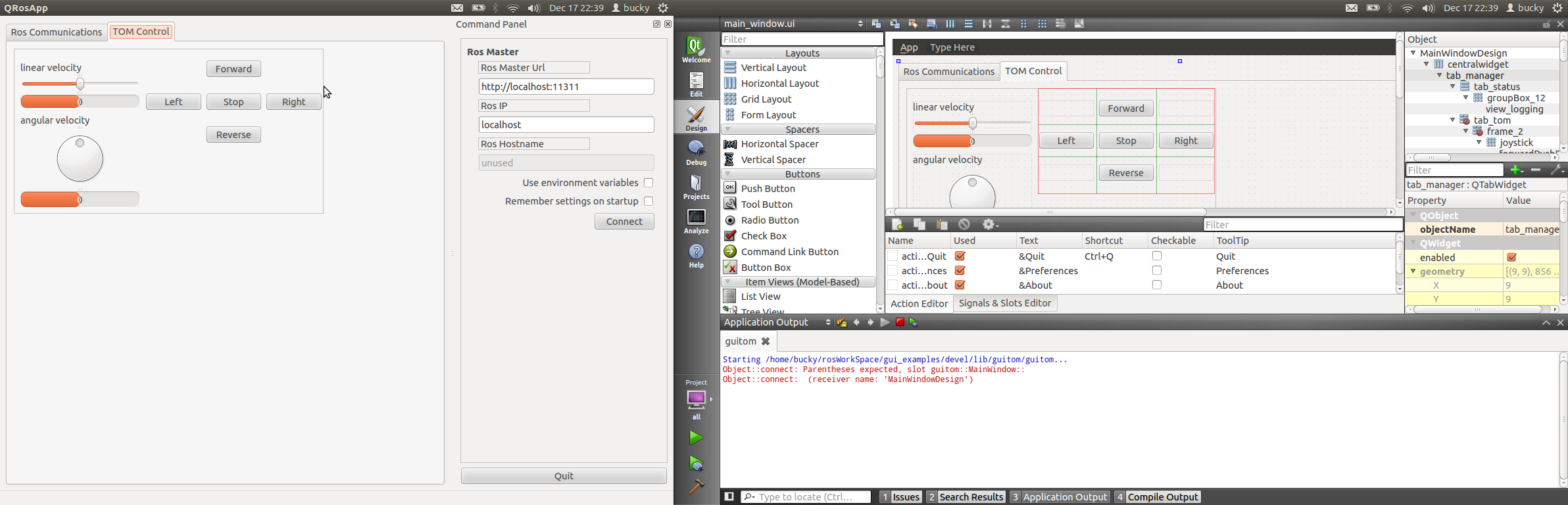
| 2014-12-17 16:06:07 -0500 | asked a question | Publishing/Subscribing from/to Qt GUI to ROS Hi, I am working on qt based GUI tool that I found in ROS wiki. As I understand, this package provides the basic requirement to interface Qt to ROS by means of a
here is sample GUI... If anyone has worked on this, Please give me an Idea to perform the above... Thanks in advance. Murali |
| 2014-12-17 05:44:07 -0500 | marked best answer | Working with two ROS Versions on single system Hi All, I would like to install two versions of ROS --> Groovy and Hydro (or Groovy and Fuerte for example). Is it fine to work this way or should I have only one version of ROS installed? Has anyone tried this before? Thanks Murali |
| 2014-12-02 06:06:34 -0500 | commented question | Illegal Instruction when trying to run raspicam_node your raspicam node will not work if you don't have |
| 2014-12-02 06:00:26 -0500 | commented question | Illegal Instruction when trying to run raspicam_node well, I don't know why you have to cross compile this code? you can just copy/download it into you Pi, and |
| 2014-12-01 07:08:35 -0500 | commented question | Illegal Instruction when trying to run raspicam_node probably you are right, I am able to run the node on groovy (@90 fps too). have you built the |
| 2014-11-30 17:10:09 -0500 | commented question | Illegal Instruction when trying to run raspicam_node I just saw the link you have mentioned, It seems this package was built with Groovy in consideration (check README.md file) . I could manage only bare bones version of Indigo. However, I'll give this package a try n let u know |
| 2014-11-30 15:32:49 -0500 | commented question | Illegal Instruction when trying to run raspicam_node may I ask which version of ROS you are using? |
| 2014-11-18 12:15:50 -0500 | answered a question | no android tutorials are working on my android device On your PC, You should have done the following:
and then when you use your android device, try connecting with connect: It should work! hope this helps. mk |
| 2014-11-18 04:32:05 -0500 | answered a question | how to install a driver like usb_cam Hi, Right now, Like you have mentioned the usb_cam has source code for wet build (catkin build). you just need to do the following to build it from source. (Note: I assume you are using ROS hydro or Indigo, It should work on groovy as well may be you can try it). But all that said, here you go:
after the above you can verify using ..
roscore on a new terminal
and then in the terminal where you $ source 'd your usb_cam code run:
Make sure you have your camera connected, before running the above command!!! you view the captured image on rviz,
hope this helps. mk |
| 2014-11-03 18:28:03 -0500 | received badge | ● Notable Question (source) |
| 2014-10-30 18:38:44 -0500 | commented question | unable to read the data from micro controller on ROS Not sure if it is still relevant to you! but did you check your uc baud rate? |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.