The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-04-06 17:03:22 -0500 | received badge | ● Taxonomist |
| 2021-07-01 16:40:26 -0500 | received badge | ● Necromancer (source) |
| 2020-09-04 06:59:47 -0500 | received badge | ● Good Question (source) |
| 2017-09-14 10:35:48 -0500 | received badge | ● Favorite Question (source) |
| 2017-04-20 17:32:24 -0500 | marked best answer | urdf_spawner -J option not working as intended Hi all, I want to set the initial joint positions of a robot in gazebo simulator starting with paused physics. I used the following in the launch file. also I tried, without the -J option in urdf_spawner. Neither seems to work. Currently I have not implemented any controllers for the joints. Therefore, disabling controllers as in this need not be considered for the time being. I could see the following messages but still the joint angles have not changed. The only way I could get it to work is by calling: separately before I unpause physics. I use ROS-Hydro with Gazebo 1.9 Any help would be really appreciated. Thanks |
| 2016-05-17 23:40:19 -0500 | received badge | ● Famous Question (source) |
| 2016-05-17 02:50:57 -0500 | edited question | robot_pose_ekf on an inclined plane Hi all, I have some questions about combining odometry with IMU for a rover navigating on a terrain. 1) (not necessarily related to ROS) What is the standard method to combine IMU and odometry for a uneven terrain rover?
2) In odom_estimation.cpp (robot_pose_ekf), absolute measurements are converted to relative odom measurements in horizontal plane, as well as only the yaw measurement of IMU is used.
Thank you for your time. CS |
| 2016-05-17 02:50:31 -0500 | edited question | joint:slider not working Hi all, Since URDF does not support closed loop links I closed the loop using a hidden joint:hinge in the .gazebo.xacro file for my robot, following some ROS answers for a similar question. However, when I change the joint:hinge to joint:slider the model no longer has this joint in the gazebo (show joints). Why is that? Any workaround? Also, joint:screw didn't work either. Thank you Cheers! CS |
| 2016-05-17 02:50:02 -0500 | edited question | Simulating a custom robot going up a ramp in Gazebo Hi all, I tried to simulate a custom 4-wheel robot model (URDF) going up a ramp in gazebo but it cannot do so. It can navigate on the ground plane using a custom base controller but when it tries to go up the ramp it gets stuck. What am I missing in the URDF? Some pointers to implement this is appreciated. Thank you CS Here is my URDF I still dont have a good grasp of the tags anchor, mechanicalReduction <robot xmlns:sensor="http://playerstage.sourceforge.net/gazebo/xmlschema/#sensor" xmlns:controller="http://playerstage.sourceforge.net/gazebo/xmlschema/#controller" xmlns:interface="http://playerstage.sourceforge.net/gazebo/xmlschema/#interface" xmlns:xacro="http://playerstage.sourceforge.net/gazebo/xmlschema/#interface" name="my_robot"> |
| 2016-05-17 02:49:19 -0500 | edited question | PR2 Base Controller Hi all, I would like to get some insight about how the PR2 base controller works. Regarding the same topic, a question was raised previously with the title "PR2 base controller algorithm" but the answers do not provide adequate information. In addition I would to like get clarified some of other questions I have: i) when a commanding velocity is set by an external node, as in http://www.ros.org/wiki/pr2_controlle... , first the caster steer direction is changed and then the wheel velocity is applied, is that right? ii) I could not find any position controller to change the caster steering in the pr2_base_controller2 code. Thank you in advance CS |
| 2016-05-17 02:48:36 -0500 | edited question | ROS Installation for NXT Hi all, Here is my question. If I have already installed ros-electric-desktop-full in my desktop, and if I want to work on NXT with ROS, how should I configure it? Can the steps mentioned in "http://www.ros.org/wiki/Robots/NXT/electric" be executed even if I have already installed ros-electric-desktop-full? Thanks in advance CS |
| 2016-05-17 02:48:04 -0500 | edited question | Gazebo headless crashes when starting pr2.launch Hi all, I am just trying to work out "pr2_mechanism/Tutorials/Running a realtime joint controller". But Gazebo crashes when tried launching pr2. So I ran gazebo headless and it still crashes. Here is the backtrace. |
| 2016-05-17 02:47:18 -0500 | edited question | pioneer2dx teleop in Gazebo Dear all, http://robotics.usc.edu/ros/category/... says that a working drivable urdf model of the Pioneer2dx for gazebo/rviz is released. How can I teleoperate a pioneer robot in a Gazebo simulation? I could visualize the pioneer robot both in gazebo and in rviz using, roslaunch p2os_urdf pioneer3dx_urdf.launch roslaunch p2os_urdf pioneer3dx.gazebo.launch What should I do next? By the way, after launching from above launch files, after few minutes, the robot automatically starts moving. Why is that? Thank you in advance CS |
| 2016-05-17 02:46:42 -0500 | edited question | Gazebo world file from a collada file Dear ROS users, I created a collada file of a terrain using Blender and now I want it to be included in a Gazebo .world file. How is this done? Thanks in advance CS |
| 2016-05-17 02:44:34 -0500 | edited question | What does the parameter ~sensor_model/max_range mean in octomap server ? Hi guys, With the sensor_model/max_range set to 5, the points of my point cloud that are longer than 5 still get inserted in the map. e.g. the max readings from the LRF What does sensor_model/max_range really mean? Do I have to filter the LRF max readings in individual scans before assembling it to the point cloud? Thank you in advance CS |
| 2016-05-17 02:43:24 -0500 | edited question | laser_assembler while moving Hi all, This question is to clarify something. According to http://www.ros.org/wiki/laser_assembler the individual scans are projected into a fixed frame right? So, that means we can readily use the assembled cloud in process like octomap even when the robot is moving. I mean we do not need the robot to stop and acquire the cloud. Is this correct? Thanks CS |
| 2016-05-17 02:40:46 -0500 | edited question | Cannot change bodyName of GazeboRosImu in hector_gazebo_plugins Hi all, This question is actually related to http://answers.ros.org/question/44732... So, apparently the plugin works only when <bodyname>base_footprint</bodyname> and fails when a custom body name is given. I am using ros-electric. The error is at -> ROS_FATAL("gazebo_ros_imu plugin error: bodyName: %s does not exist\n",bodyName.c_str()); Tried debugging the plugin but with no luck. Any help would be appreciated. Thank you CS |
| 2016-05-17 02:40:15 -0500 | edited question | rosbag playback speed Hi all, We have some sensor data that are saved as .csv files (data+timestamp) from a robot, which does not run ROS. To run some algorithms, I converted once such file into a ROS bag file using a python script. After setting the /use_sim_time parameter and when playback this bag file with rosbag play --clock abc.bag, all the data seems to be flushed at once. I need to know what determines the natural play speed of a bag file. I thought it is done using the header.stamp Thank you in advance CS |
| 2016-05-17 02:38:53 -0500 | edited question | Errors starting hector gazebo imu Hello all, I migrated from electric to fuerte and when I start my custom robot in gazebo I get the following errors. I am using the hector gazebo imu. I could not find (grep) where these errors are coming from. Error [Param.cc:250] Parameter [headingDrift] is a [Ss], attempting to get as a double. Error [Param.cc:250] Parameter [headingGaussianNoise] is a [Ss], attempting to get as a double. Any help would be appreciated. Thank you CS |
| 2016-05-17 02:38:17 -0500 | received badge | ● Associate Editor (source) |
| 2016-05-17 02:37:40 -0500 | edited question | what should be done to keep PR2 stationary on a ramp? Hello all, In Gazebo simulation, the PR2 goes down a ramp due to gravity ; I assume the wheel base controller still applies 0 velocity for the wheels. How should I keep PR2 stationary? What changes should be made in the base controller, URDF, transmission? Thanks in advance. CS |
| 2016-05-17 02:37:13 -0500 | edited question | bottom cam tf error in ardrone_autonomy Hi all, As far as I understand, there is a problem with the transform of base to bottom_cam in ardrone_autonomy. The problem is as follows: In ardrone_driver.cpp around line 92~97 we see the following code. 1) The above rotation makes the x-axis of the bottom_cam point towards the y-axis of the ardrone_base_link while the y-axis of the bottom_cam point towards the x-axis of the ardrone_base_link. This gives trouble if the bottom_cam observe, for instance, a marker like alvar (ar_track_alvar) which is aligned with the ardrone_base_link; it makes the forward and backward reversed. 2) I guess the translation in the negative Y direction is also wrong. May be it should be in the negative Z direction from the ardrone_base_link 3) Just a minor matter: the comment should also be corrected to Base to Bottom cam (not bottom to base). So, I suggest By the way, there was a similar question at link Thank you CS |
| 2016-05-17 02:37:03 -0500 | received badge | ● Famous Question (source) |
| 2016-05-17 02:37:03 -0500 | received badge | ● Notable Question (source) |
| 2016-05-17 02:36:22 -0500 | received badge | ● Notable Question (source) |
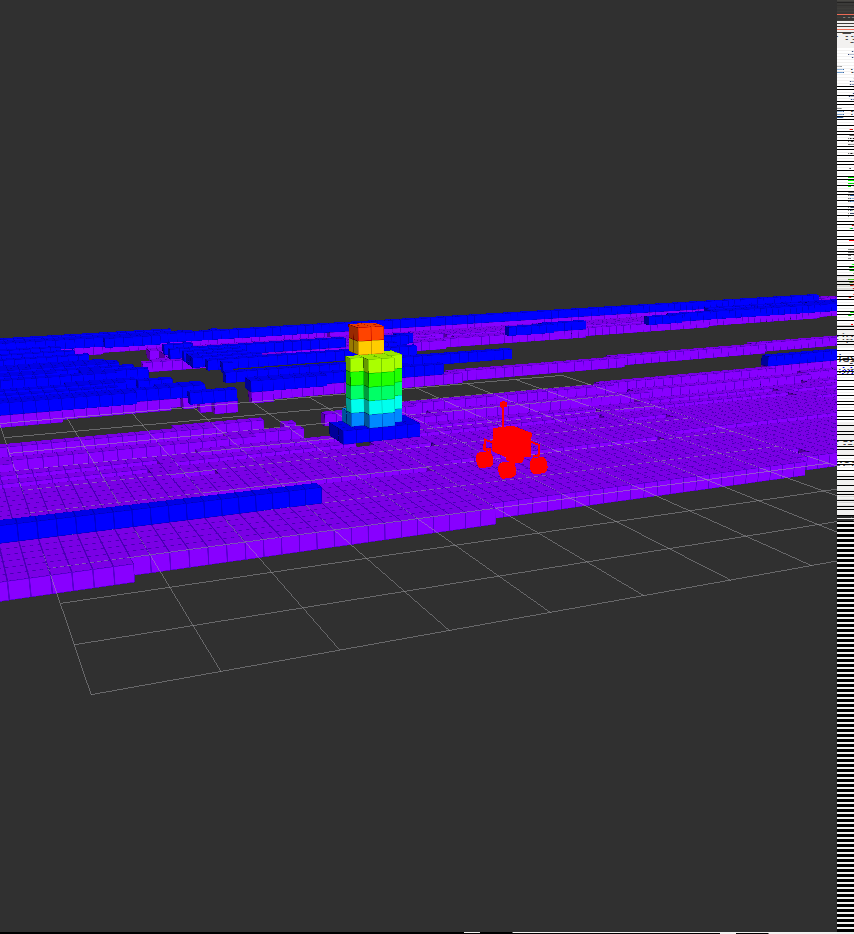
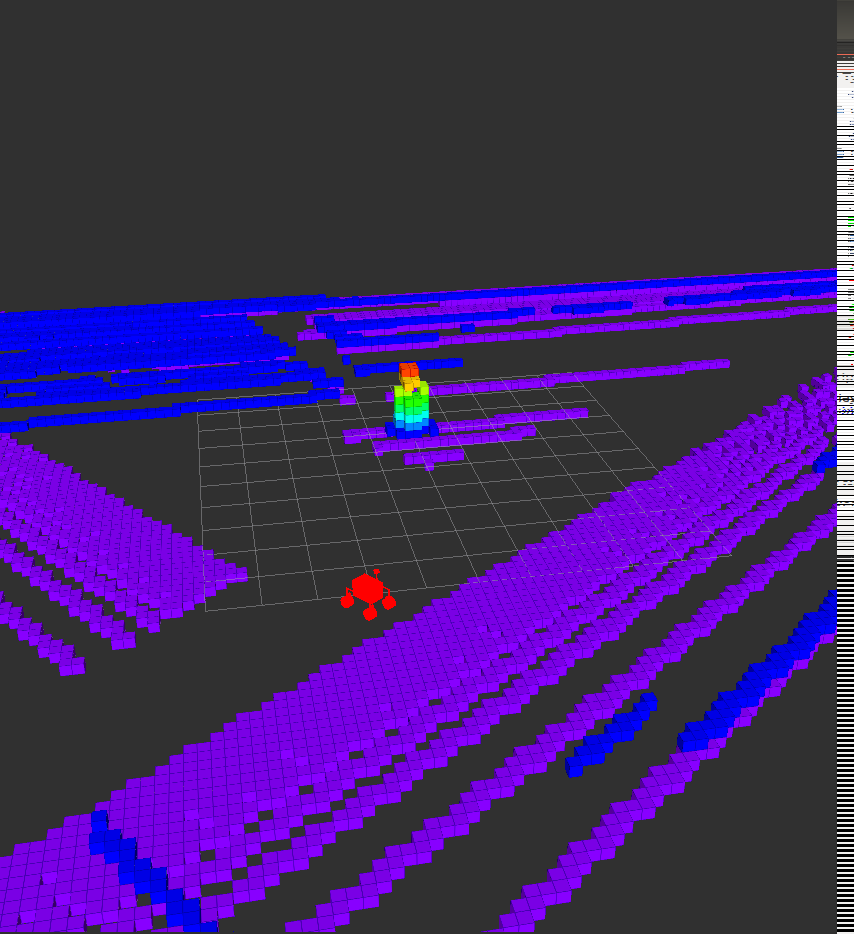
| 2016-05-17 02:34:43 -0500 | edited question | octomap_server problems Hi all, I simulate a robot in gazebo while it maps the environment using octomap_server. I have 2 questions regarding the visualization. 1) the mapped octomap cells get cleared after some time if the robot does not re-visit the area previously mapped. Why is this happenning? 2) why the colors of the octomap changing after a while? Thank you CS ########## Edit ########## Running ROS-Groovy ros-groovy-octomap 1.5.4 ros-groovy-octomap-mapping 0.4.8 ros-groovy octomap-ros 0.2.6 The second image shows that areas previously filled had been removed after some time.
launch file |
| 2016-05-17 02:33:16 -0500 | edited question | Configuring ROS environment for Fuerte Hi all, Can someone tell me how to configure the environment for Fuerte so that I can get my custom packages to run as before? I am looking for something similar to this: http://www.ros.org/wiki/ROS/Tutorials... Thanks Cheers CS |
| 2016-05-17 02:31:52 -0500 | edited question | gmapping without robot_pose_ekf Hi all, I tried running pr2 in gazebo (pr2.launch), but removing the robot_pose_ekf in "pr2_bringup.launch" plus setting the parameter "odom_frame" to "odom" (changing from odom_combined to odom) for slam_gmapping node. Also, to get the tfs from odometry I changed "publish_tf" to true in pr2_odometry.yaml (in /pr2_simulator/pr2_controller_configuration_gazebo/pr2_odometry.yaml). Actually I am changing a custom launch files not the originals. When I visualize it in rviz, using both the fixed frame and target frame set to /odom I see the pr2 is kind of blinking (Robot Model status changing back and forth between OK and Error). Also, in the Map field I get a status error saying that "No transform from [map] to [/odom]". Thus, the map is not aligned in the display. What is happening here? By the way I am running ros-electric in ubuntu 11.04. Thank you in advance CS |
| 2016-05-17 02:31:29 -0500 | edited question | Has anyone worked with a mobile robot simulation on terrain in Gazebo? Hi all, I was wondering if anyone here has worked on a terrain robot (3D) in Gazebo simulation. What I would like to know is,
Thank you in advance CS |
| 2016-03-18 20:13:53 -0500 | received badge | ● Popular Question (source) |
| 2016-02-18 03:12:32 -0500 | commented answer | Point Cloud SLAM without RGB Information @chukcha2 no i did not use RGBD SLAM after all. |
| 2016-02-17 15:24:49 -0500 | marked best answer | Point Cloud SLAM without RGB Information Hi all, As far as I understand, RGBD SLAM uses visual features in addition to the point cloud to perform SLAM. If I use a tilting LRF, which has high resolution and range than a kinect, can I use RGBD SLAM package (probably with some modification) to do just point cloud SLAM without using any visual features? Thanks in advance CS |
| 2016-02-01 19:03:45 -0500 | commented question | Arduino DUE + CMake with rosserial_arduino @tonybaltovski ok I understand. So, what modifications should I make to compile and upload to DUE as in link text |
| 2016-02-01 01:43:29 -0500 | asked a question | Arduino DUE + CMake with rosserial_arduino Hello all, What is the board name I should use for BOARD? The following does not work. I have installed DUE related stuff in IDE by Tools -> Boards Manager. I just want the arduino things to be built using catkin just like other packages. Also, I noticed that /home/peshala/arduino-1.6.5-r5/hardware/arduino/avr/boards.txt does not contain an entry for "due". Thank you. CS |
| 2015-11-16 01:29:29 -0500 | marked best answer | Function logic of PR2 Odometry iterativeLeastSquares Hi all, Can someone tell what happens in "iterativeLeastSquares" method in http://mirror.umd.edu/roswiki/doc/api... According to its description the function is used to compute the most likely solution to the odometry using iterative least squares. And, I tried understanding the code but with no luck. If someone can give a rough idea, then I would be able to follow the code. Thank you CS |
| 2015-09-08 04:08:15 -0500 | answered a question | Using qwt with qt_ros and worked for me. My qwt stuff were in /usr/include/qwt folder; not in /usr/include/qwt-qt4 cheers! |
| 2015-07-05 21:21:03 -0500 | commented answer | 3D pointcloud SLAM @Ricky Thank you very much. |
| 2015-07-05 21:17:57 -0500 | received badge | ● Famous Question (source) |
| 2015-07-02 20:47:48 -0500 | edited question | 3D pointcloud SLAM Hey guys, Is there any ROS 3D pointcloud SLAM package available, which does not use any odometry sources? http://wiki.ros.org/ethzasl_icp_mapper seems to require the sensor_frame → /odom transform. Thanks. |
| 2015-07-02 19:57:48 -0500 | commented answer | 3D pointcloud SLAM actually I am not talking about visual odometry. I am looking for package that only makes use of pointcloud data, for example from a Velodyne sensor, and perform 3D SLAM. Thanks! |
| 2015-07-02 09:45:32 -0500 | received badge | ● Notable Question (source) |
| 2015-07-02 03:33:08 -0500 | received badge | ● Popular Question (source) |
| 2015-07-01 03:58:24 -0500 | answered a question | [SOLVED]How to select dual return mode for velodyne VLP16 After connecting to VLP16, connect to the web server at http://192.168.1.201/ and you will find settings to change many hardware settings. There you can change the return mode. more details: http://velodynelidar.com/lidar/hdldow... cheers |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.