The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-03-24 04:38:13 -0500 | received badge | ● Good Question (source) |
| 2023-03-04 11:55:17 -0500 | received badge | ● Famous Question (source) |
| 2022-12-09 05:04:54 -0500 | received badge | ● Famous Question (source) |
| 2022-11-15 14:44:37 -0500 | received badge | ● Nice Question (source) |
| 2022-10-24 07:41:59 -0500 | received badge | ● Student (source) |
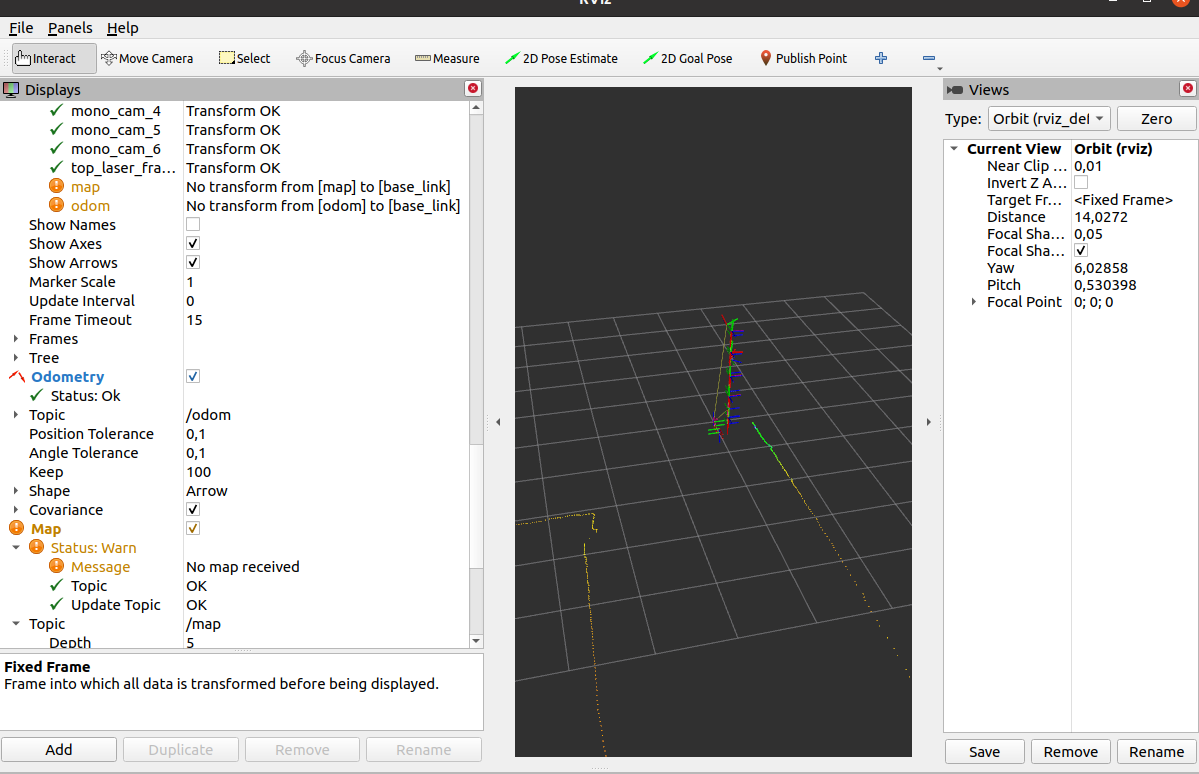
| 2022-06-28 18:28:32 -0500 | marked best answer | How to get the robot trajectory plot in RViz2 by Slam toolbox I am using slam_toolbox for mapping from Ros2 bag files. The slam toolbox generates the map exceptionally well. Also using the slam toolbox plugin or by using the commands given in the Git repo it is of course possible to generate the pose graph file to be used in localization mode afterward. I am using Ros2 Galactic and the question is as follows: Even though the map is generated by the Slam toolbox, the trajectory path (preferably with a line) is not shown in Rviz2 with Slam toolbox. However, instead of a line, the trajectory is shown with multiple dots which is not what I needed. Is there a way to fix this issue and get the trajectory path n RViz2 with a line in the generating Map itself? |
| 2022-06-21 04:14:03 -0500 | commented answer | How to get the robot trajectory plot in RViz2 by Slam toolbox The requirement is, a visual evaluation to show the robot trajectory in rviz on top of the map. Yes, it generates using |
| 2022-06-17 06:43:14 -0500 | received badge | ● Notable Question (source) |
| 2022-06-16 01:51:07 -0500 | received badge | ● Popular Question (source) |
| 2022-06-15 04:26:16 -0500 | asked a question | How to get the robot trajectory plot in RViz2 by Slam toolbox How to get the robot trajectory plot in RViz2 by Slam toolbox I am using slam_toolbox for mapping from Ros2 bag files. T |
| 2022-05-24 06:34:59 -0500 | received badge | ● Notable Question (source) |
| 2022-05-24 06:34:59 -0500 | received badge | ● Popular Question (source) |
| 2022-04-15 15:44:51 -0500 | received badge | ● Famous Question (source) |
| 2022-03-24 14:40:28 -0500 | received badge | ● Notable Question (source) |
| 2022-01-05 09:49:47 -0500 | received badge | ● Famous Question (source) |
| 2022-01-05 01:53:43 -0500 | marked best answer | Estimated localization trajectory of the robot as a list of TF messages using SLAM Toolbox How can I obtain the estimated localization trajectory of the robot as a list of TF messages? Ideally, at the same frequency as the laser measurements. Background: I want to use that trajectory as the localization of my robot in TF for lookups. |
| 2021-12-02 08:59:34 -0500 | asked a question | Estimated localization trajectory of the robot as a list of TF messages using SLAM Toolbox Estimated localization trajectory of the robot as a list of TF messages using SLAM Toolbox How can I obtain the estimate |
| 2021-11-23 07:55:43 -0500 | received badge | ● Popular Question (source) |
| 2021-11-21 08:14:07 -0500 | asked a question | SLAM Toolbox: Difference between Offline and Online Async/Sync launch files SLAM Toolbox: Difference between Offline and Online Async/Sync launch files I've gone through most of the material provi |
| 2021-11-21 07:39:00 -0500 | answered a question | Mapping in slam_toolbox using bag files (ros2) Are the timestamps of /odom messages and the TF messages the same? That could be what's causing it if you're running a s |
| 2021-11-21 07:03:24 -0500 | commented answer | [slam_toolbox]: Message Filter dropping message: for reason 'discarding message because the queue is full' @ericnasanta , I created a script to translate all the /odom messages and write/publish them in /tf topic. If you're us |
| 2021-11-21 07:02:04 -0500 | commented answer | [slam_toolbox]: Message Filter dropping message: for reason 'discarding message because the queue is full' @ericnasanta , I created a script to translate all the /odom messages and write/publish them in /tf topic. If you're us |
| 2021-11-21 07:00:52 -0500 | commented answer | [slam_toolbox]: Message Filter dropping message: for reason 'discarding message because the queue is full' I created a script to translate all the /odom messages and write/publish them in /tf topic. If you're using a rosbag fi |
| 2021-11-10 02:24:05 -0500 | marked best answer | [slam_toolbox]: Message Filter dropping message: for reason 'discarding message because the queue is full' Hi everyone, I am using slam_toolbox (in ROS2 Galactic) to generate a map of an environment using Ros2 bag files of recorded Odometry and Laser Scan data.
However, when starting the slam toolbox via
Device information: - OS: Ubuntu - OS version: 20.04 - CPU: Intel(R) Core(TM) i5-8250U CPU @ 1.60GHz x 8 - GPU Nvidia: GeForce MX130 - Memory : 8GB Moreover, I have used the default configuration of the slam toolbox as below, and warnings are shown here:
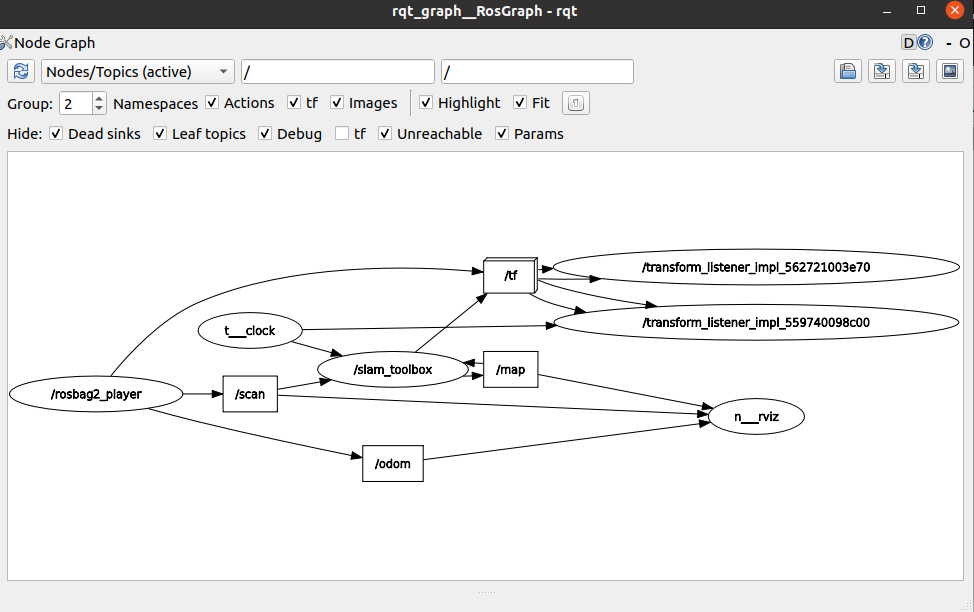
Clearly, RVIZ2 warnings are caused by the slam-toolbox which is not functioning as messages are getting discarded because the queue is full. Additionally, the
I suspect my issue is with my slam configuration. Has anyone seen this type of error before? I feel like I'm missing something easy. |
| 2021-11-10 02:24:05 -0500 | received badge | ● Scholar (source) |
| 2021-11-10 02:24:03 -0500 | commented answer | [slam_toolbox]: Message Filter dropping message: for reason 'discarding message because the queue is full' Yes, the problem was due to not having the complete TF tree. Translating all the Odom messages to TF solved the issue fo |
| 2021-11-03 03:56:06 -0500 | received badge | ● Enthusiast |
| 2021-11-02 15:19:10 -0500 | received badge | ● Notable Question (source) |
| 2021-10-26 12:09:56 -0500 | edited question | [slam_toolbox]: Message Filter dropping message: for reason 'discarding message because the queue is full' [slam_toolbox]: Message Filter dropping message: for reason 'discarding message because the queue is full' Hi everyone, |
| 2021-10-26 06:59:18 -0500 | received badge | ● Popular Question (source) |
| 2021-10-25 10:53:52 -0500 | asked a question | [slam_toolbox]: Message Filter dropping message: for reason 'discarding message because the queue is full' [slam_toolbox]: Message Filter dropping message: for reason 'discarding message because the queue is full' Hi everyone, |
| 2021-10-25 07:48:59 -0500 | received badge | ● Supporter (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.