The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-11-26 12:58:57 -0500 | received badge | ● Famous Question (source) |
| 2021-10-12 03:46:32 -0500 | received badge | ● Famous Question (source) |
| 2021-10-08 03:27:45 -0500 | received badge | ● Famous Question (source) |
| 2021-07-25 03:07:10 -0500 | received badge | ● Famous Question (source) |
| 2021-07-16 03:38:13 -0500 | received badge | ● Famous Question (source) |
| 2021-07-04 12:05:06 -0500 | received badge | ● Notable Question (source) |
| 2021-07-01 16:50:28 -0500 | received badge | ● Supporter (source) |
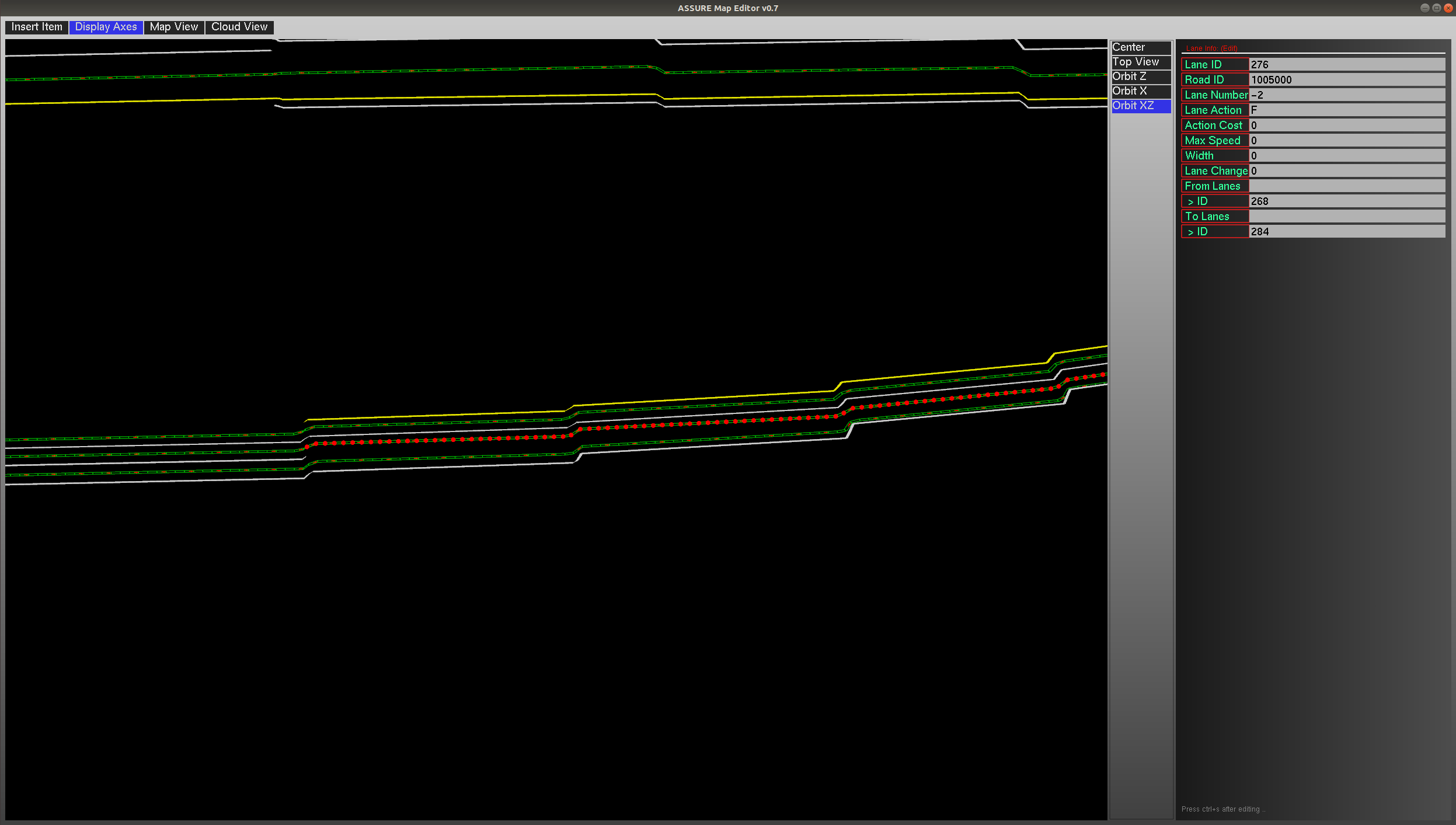
| 2021-07-01 16:50:26 -0500 | marked best answer | Road elevation issue of using opendrive map in the ASSURE mapping tool Hi all, I am trying to use the ASSURE mapping tool to load a opendrive format map to convert it into a lanelet2 format map. After loading the opendrive map, the elevation of roads are not changing continuously but "stepwise" as below:
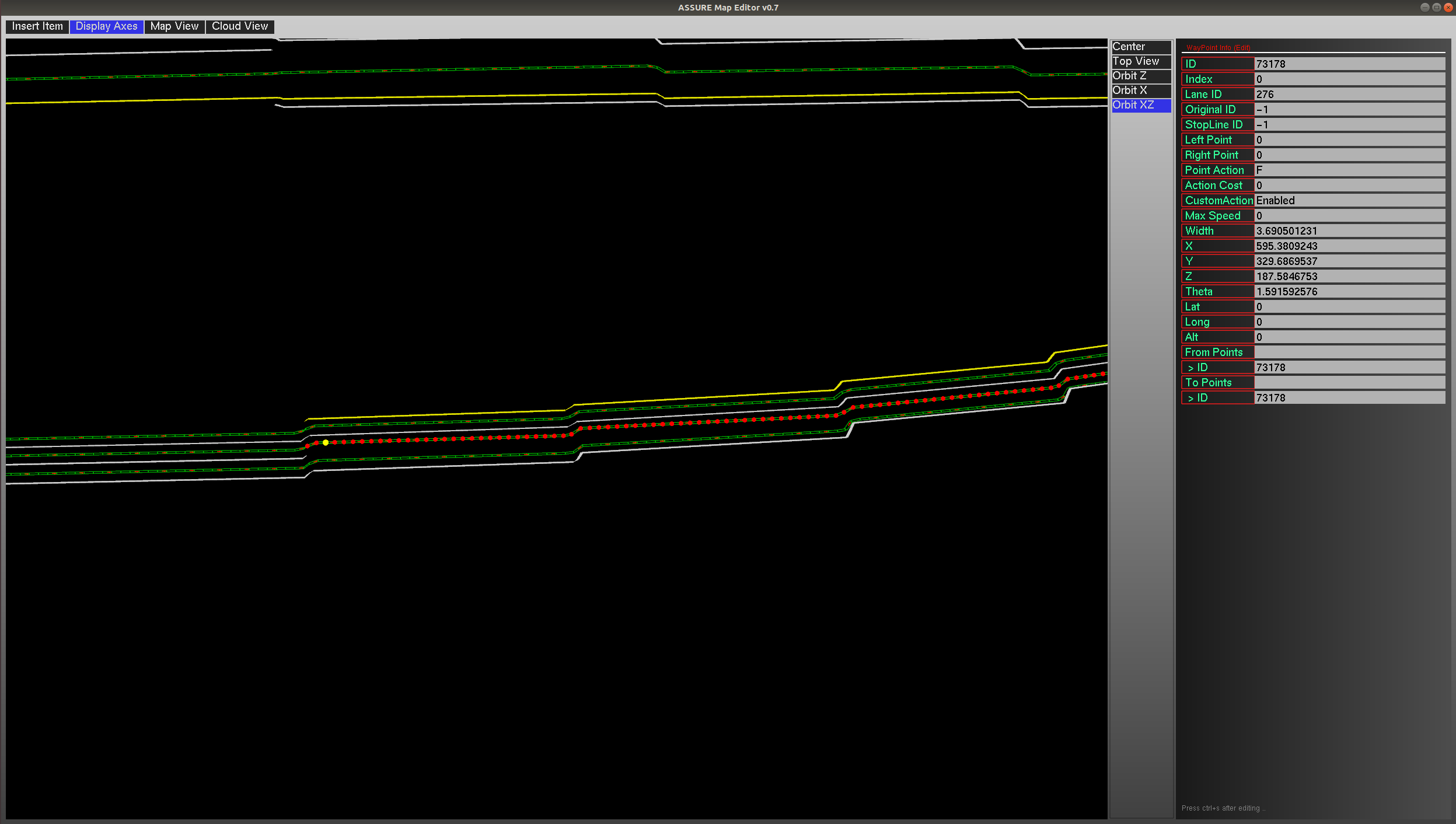
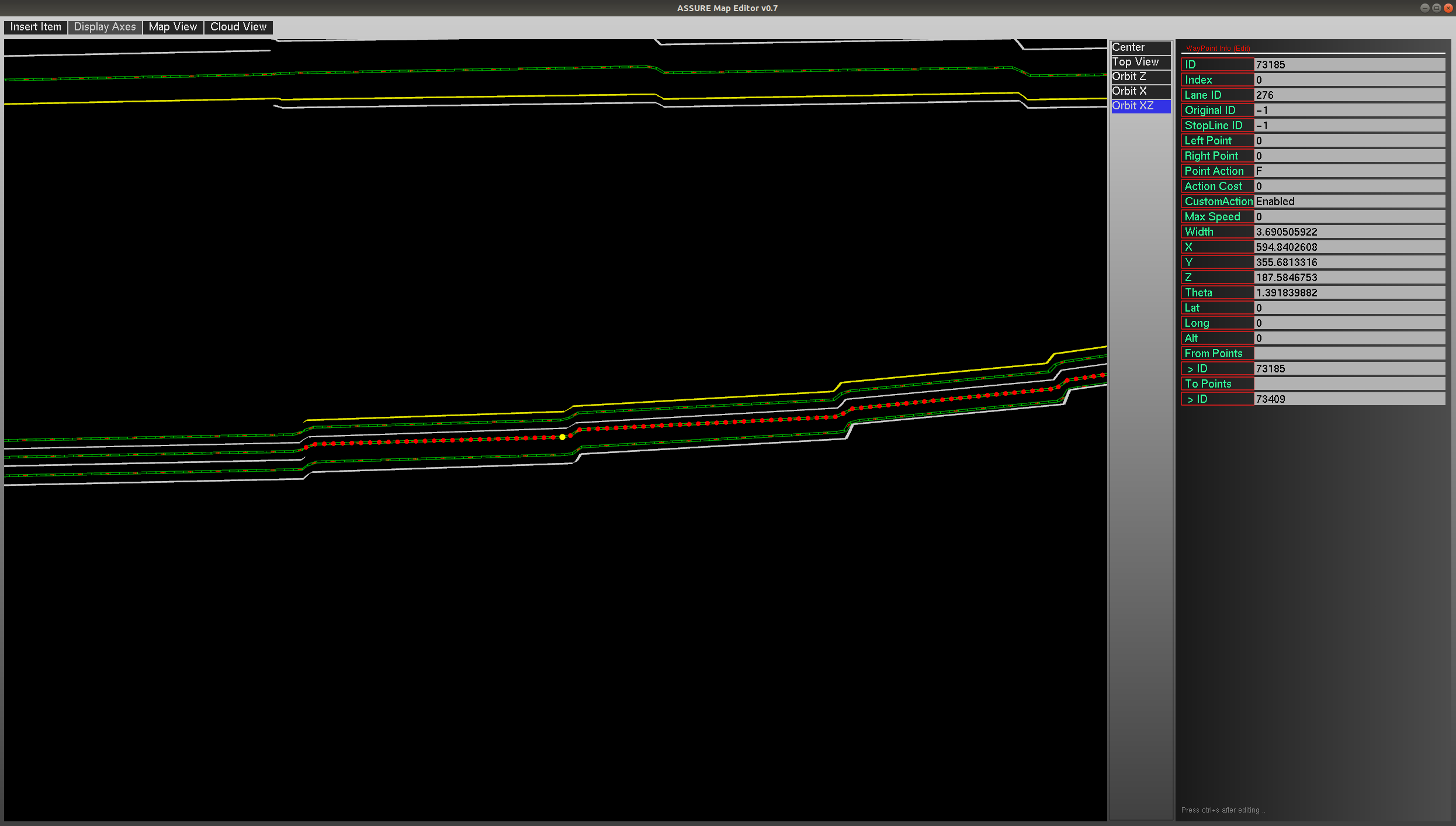
The screenshots of two specific points information are as below (it can be found they share a same z value):
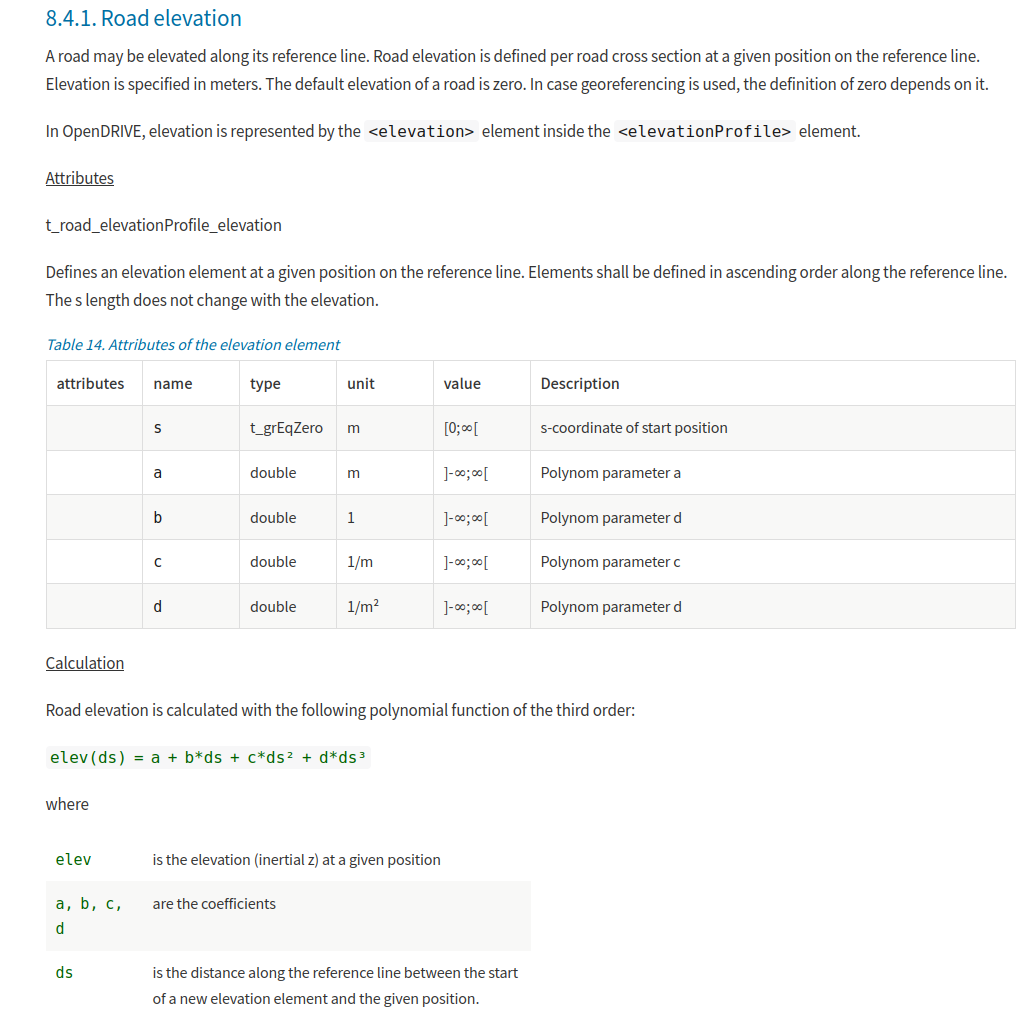
From the opendrive map introduction, the elevation is calculated based on the following equation:
After checking the original file of the opendrive map, it seems the coefficients of the road are correctly given. So I expect the road elevation should change continuously. The opendrive map format is openDRIVE 1.5, and I used the latest master branch of the ASSURE mapping tool. Please advise if you have any comments or suggestions. Thanks! |
| 2021-07-01 16:50:24 -0500 | commented answer | Road elevation issue of using opendrive map in the ASSURE mapping tool It works flawlessly, thanks for the fix :)! |
| 2021-06-27 09:29:27 -0500 | received badge | ● Popular Question (source) |
| 2021-06-27 08:54:37 -0500 | commented answer | Road elevation issue of using opendrive map in the ASSURE mapping tool Hi Hatem, Thanks a lot for helping look into it! I got it. So the pRange option assuremaptool currently support is "nor |
| 2021-06-25 14:08:49 -0500 | commented question | Road elevation issue of using opendrive map in the ASSURE mapping tool I have sent it. Thanks. |
| 2021-06-21 20:11:21 -0500 | edited question | Road elevation issue of using opendrive map in the ASSURE mapping tool Road elevation issue of using opendrive map in the ASSURE mapping tool Hi all, I am trying to use the ASSURE mapping to |
| 2021-06-21 20:10:48 -0500 | edited question | Road elevation issue of using opendrive map in the ASSURE mapping tool Road elevation issue of using opendrive map in the ASSURE mapping tool Hi all, I am trying to use the ASSURE mapping to |
| 2021-06-21 20:06:33 -0500 | commented question | Road elevation issue of using opendrive map in the ASSURE mapping tool Hi @Hatem, could you please take a look on this? Thanks. |
| 2021-06-21 20:05:57 -0500 | asked a question | Road elevation issue of using opendrive map in the ASSURE mapping tool Road elevation issue of using opendrive map in the ASSURE mapping tool Hi all, I am trying to use the ASSURE mapping to |
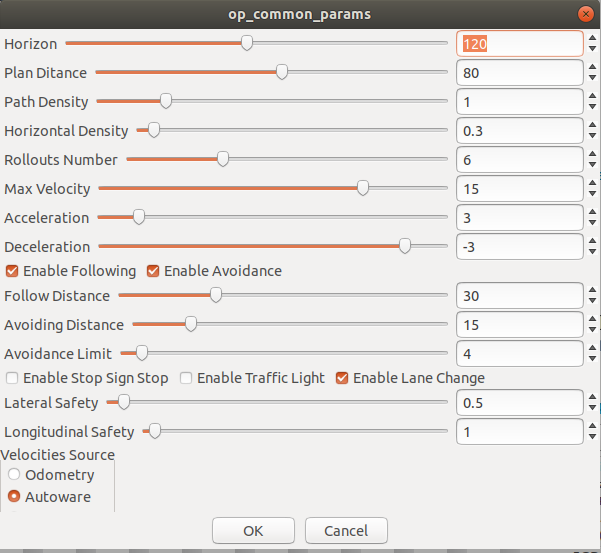
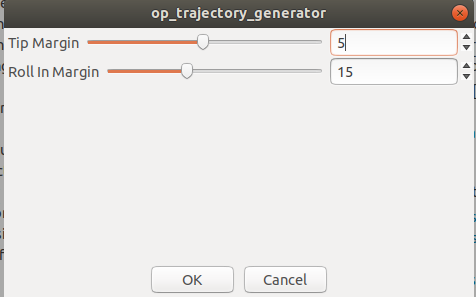
| 2021-06-17 10:48:38 -0500 | marked best answer | Autoware car following issue using Open Planner Hi all, I am trying to do some field test using the Autoware 1.13 Release + Open Planner. I would like test the car following scenario. The leading vehicle is travelling at 3m/s. The ego-vehicle is controlled using the Autoware+open planner. The parameters used for local planning are as below:
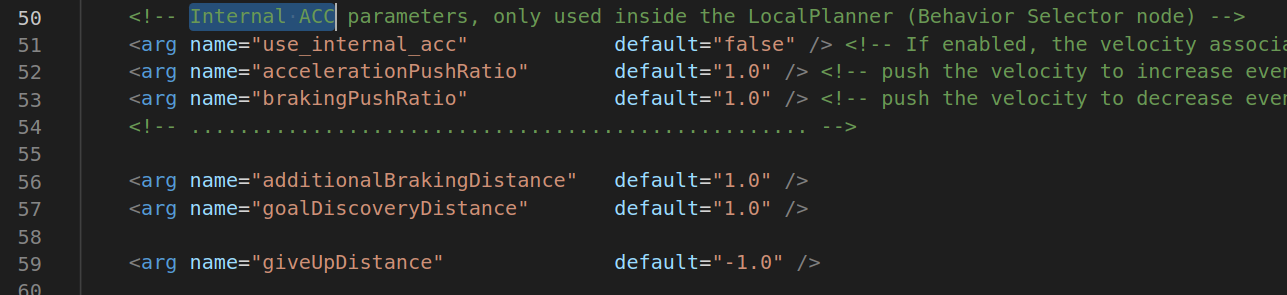
The ego-vehicle did not try to maintain a safe car-following distance (I assume it will maintain a safe gap with the same velocity with the leading vehicle). Instead, It approached the leading vehicle and made a hard brake to a full stop. Here is a video showing the process (sorry for the low resolution). I am using default values for Internal ACC parameters as shown below:
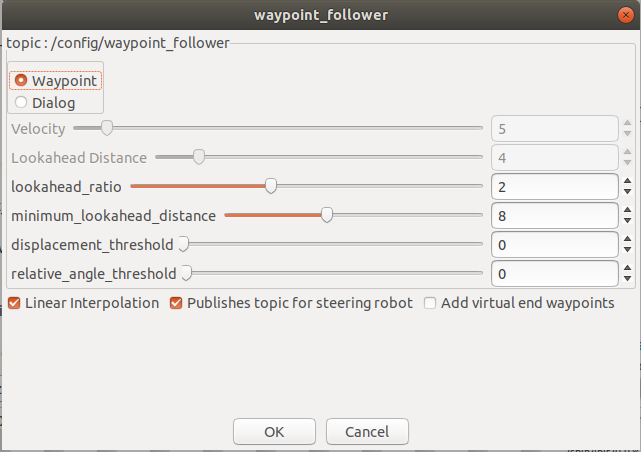
And yes I am using pure pursuit to track the trajectory, the parameters used for pure pursuit are as below:
Is this caused by improper setting of some parameters? Any comments and suggestions are appreciated. Thanks! |
| 2021-06-17 10:41:38 -0500 | received badge | ● Notable Question (source) |
| 2021-06-17 10:38:07 -0500 | commented answer | Autoware car following issue using Open Planner Sure thing, just want to double-check it :) thanks a lot for the detailed answer! |
| 2021-06-17 10:29:36 -0500 | commented answer | Autoware Open Planner global path and local path replan issue @jayess Sure, no problem. But which issue you are mentioning? I raised two questions in the thread, the first one is abo |
| 2021-06-17 10:25:00 -0500 | commented answer | Autoware Open Planner global path and local path replan issue Got it. Thanks a lot! |
| 2021-06-17 10:11:04 -0500 | commented answer | Autoware car following issue using Open Planner Got it! Could you please confirm that lines 627 and 657 in DecisionMaker.cpp should be commented out? It seems like a bu |
| 2021-06-17 07:36:05 -0500 | received badge | ● Notable Question (source) |
| 2021-06-17 02:52:52 -0500 | received badge | ● Popular Question (source) |
| 2021-06-16 20:21:21 -0500 | edited question | Autoware Open Planner global path and local path replan issue Autoware Open Planner global path and local path replan issue Hi all, I am using the Autoware 1.13 Release + Open Plann |
| 2021-06-16 20:20:18 -0500 | commented answer | Autoware Open Planner global path and local path replan issue Hi Hatem, Thanks for the answer! (Solved) Got it, so the left red dots and circles are just visualization issue and w |
| 2021-06-16 19:59:16 -0500 | commented question | Autoware car following issue using Open Planner Hi Hatem, The line 627 and 657 in the file common/op_planner/src/DecisionMaker.cpp (I am using the branch openplanner.1 |
| 2021-06-16 14:08:59 -0500 | received badge | ● Popular Question (source) |
| 2021-06-16 12:14:08 -0500 | received badge | ● Commentator |
| 2021-06-16 12:14:08 -0500 | commented question | Autoware car following issue using Open Planner Hi @Hatem, I did not find the "enableinternalACC" parameter in the code (Am I using the right version of the open planne |
| 2021-06-16 12:06:44 -0500 | edited question | Autoware car following issue using Open Planner Autoware car following issue using Open Planner Hi all, I am trying to do some field test using the Autoware 1.13 Relea |
| 2021-06-16 00:03:05 -0500 | commented question | Autoware Open Planner global path and local path replan issue Hi @Hatem, could you please take a look on this? Thanks :)! |
| 2021-06-16 00:02:59 -0500 | commented question | Autoware car following issue using Open Planner Hi @Hatem, could you please take a look on this? Thanks :)! |
| 2021-06-15 23:59:07 -0500 | commented question | Autoware Open Planner global path and local path replan issue Hi @Hatem, could you please help on this? Thanks :)! |
| 2021-06-15 23:58:57 -0500 | commented question | Autoware car following issue using Open Planner Hi @Hatem, could you please help on this? Thanks :)! |
| 2021-06-15 23:57:38 -0500 | asked a question | Autoware Open Planner global path and local path replan issue Autoware Open Planner global path and local path replan issue Hi all, I am using the Autoware 1.13 Release + Open Plann |
| 2021-06-15 22:42:29 -0500 | asked a question | Autoware car following issue using Open Planner Autoware car following issue using Open Planner Hi all, I am trying to do some field test using the Autoware 1.13 Relea |
| 2021-06-15 22:01:52 -0500 | commented answer | How to align point cloud map and vector map or kml map Hi Hatem, Thanks for your reply! For those who have the same question: I use the pcl-tool Hatem mentioned to rotate an |
| 2021-06-15 22:01:25 -0500 | marked best answer | How to align point cloud map and vector map or kml map Hi all, I would like to build a vector map (or kml map) to use in Autoware 1.13 + Open Planner 2.0. Currently, I have a opendrive format map (.xodr) and a point cloud map (generated using NDT mapping and I have its origin location lat, lon). To convert the opendrive format map into vector map (or .kml map for open planner), I followed these steps:
However, the point cloud map and vector map are not aligned with each other (with offset and also rotation). Any comments and suggestions are appreciated. Thanks! |
| 2021-06-10 09:58:18 -0500 | received badge | ● Notable Question (source) |
| 2021-06-08 21:44:07 -0500 | commented answer | How to align point cloud map and vector map or kml map Hi Hatem, Thanks for your reply! For those who have the same question: I use the pcl-tool Hatem mentioned to rotate th |
| 2021-06-07 09:55:34 -0500 | commented answer | How to align point cloud map and vector map or kml map Hi Hatem, Could you please explain a little bit what "at least orientation as the OpenDRIVE map. " means? Since I prev |
| 2021-06-07 08:03:15 -0500 | received badge | ● Popular Question (source) |
| 2021-06-04 21:11:06 -0500 | edited question | How to align point cloud map and vector map or kml map How to align point cloud map and vector map or kml map Hi all, I would like to build a vector map (or kml map) to use i |
| 2021-06-04 20:09:07 -0500 | received badge | ● Editor (source) |
| 2021-06-04 20:09:07 -0500 | edited question | How to align point cloud map and vector map or kml map How to align point cloud map and vector map or kml map EDITING ....... |
| 2021-06-04 19:31:07 -0500 | edited question | How to align point cloud map and vector map or kml map How to align point cloud map and vector map or kml map Hi all, I would like to build a vector map (or kml map) to use i |
| 2021-06-04 17:18:03 -0500 | asked a question | How to align point cloud map and vector map or kml map How to align point cloud map and vector map or kml map Hi all, I would like to build a vector map (or kml map) to use i |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.