The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-08-12 10:51:41 -0500 | received badge | ● Famous Question (source) |
| 2023-08-12 10:51:41 -0500 | received badge | ● Notable Question (source) |
| 2023-05-30 08:52:19 -0500 | received badge | ● Nice Answer (source) |
| 2023-05-08 22:46:02 -0500 | received badge | ● Nice Answer (source) |
| 2023-04-21 02:11:27 -0500 | received badge | ● Famous Question (source) |
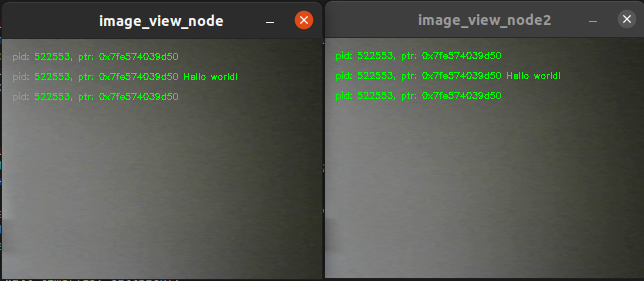
| 2023-03-27 19:58:20 -0500 | marked best answer | Intraprocess zero-copy seems to be working for multiple subscribers When following instructions from Pipeline with two image viewers, running
the expected result is that the last pointer in image_view_node_2 has a different memory address. However, all the memory addresses are the same. Does this mean zero-copy intraprocess communication works for multiple subscribers? Or is it my misunderstanding somewhere?
ps. ROS2 Galactic, DDS is left as default (CycloneDDS) |
| 2023-03-24 22:10:24 -0500 | received badge | ● Famous Question (source) |
| 2023-02-02 17:10:33 -0500 | received badge | ● Necromancer (source) |
| 2023-01-28 14:54:31 -0500 | received badge | ● Notable Question (source) |
| 2023-01-11 11:24:10 -0500 | received badge | ● Popular Question (source) |
| 2023-01-01 14:33:48 -0500 | received badge | ● Famous Question (source) |
| 2022-12-14 07:30:36 -0500 | answered a question | [ROS2 foxy] ros2 topic pub - with current timestamp This functionality was added to ros2cli recently in https://github.com/ros2/ros2cli/pull/749, and is available in ROS 2 |
| 2022-11-16 04:27:55 -0500 | received badge | ● Notable Question (source) |
| 2022-11-16 04:27:55 -0500 | received badge | ● Famous Question (source) |
| 2022-11-13 16:57:12 -0500 | received badge | ● Notable Question (source) |
| 2022-11-10 07:47:04 -0500 | edited answer | Sudden custom_msgs related error in ros2, build failed in CI. TL;DR: In your Github CI, specify a container as following: runs-on: ubuntu-20.04 # or ubuntu-latest or ubuntu-22.04 c |
| 2022-11-10 07:46:46 -0500 | edited answer | Sudden custom_msgs related error in ros2, build failed in CI. TL;DR: In your Github CI, specify a container as following: runs-on: ubuntu-20.04 # or ubuntu-latest or ubuntu-22.04 c |
| 2022-11-10 07:45:47 -0500 | edited answer | Sudden custom_msgs related error in ros2, build failed in CI. TL;DR: In your Github CI, specify a container as following: runs-on: ubuntu-20.04 # or ubuntu-latest or ubuntu-22.04 c |
| 2022-11-10 00:40:24 -0500 | answered a question | Sudden custom_msgs related error in ros2, build failed in CI. TL;DR: In your Github CI, specify a container as following: runs-on: ubuntu-20.04 # or ubuntu-latest or ubuntu-22.04 c |
| 2022-11-08 03:44:08 -0500 | received badge | ● Famous Question (source) |
| 2022-11-04 05:44:40 -0500 | edited question | Figuring out installed ignition gazebo version inside launch file Figuring out installed ignition gazebo version inside launch file I'm looking to support multiple ignition gazebo versio |
| 2022-11-04 05:44:26 -0500 | asked a question | Figuring out installed ignition gazebo version inside launch file Figuring out installed ignition gazebo version inside launch file I'm looking to support multiple ignition gazebo versio |
| 2022-11-03 22:41:49 -0500 | edited question | Checking a launch file works without errors Checking a launch file works without errors I can't seem to find a simple way to check that a launch.py file can be laun |
| 2022-11-03 22:41:15 -0500 | asked a question | Checking a launch file works without errors Checking a launch file works without errors I can't seem to find a simple way to check that a launch.py file can be laun |
| 2022-10-31 13:42:22 -0500 | received badge | ● Famous Question (source) |
| 2022-09-28 16:34:01 -0500 | received badge | ● Great Answer (source) |
| 2022-09-19 08:28:13 -0500 | commented question | rqt plugin for JointGroupPositionController, or alternatives? Got it, seems like I'm not missing something obvious. I think I'll be able to get around to writing something up. |
| 2022-09-17 02:13:18 -0500 | edited question | rqt plugin for JointGroupPositionController, or alternatives? rqt plugin for JointGroupPositionController, or alternatives? I'd like to control joint positions of multiple joints on |
| 2022-09-17 02:11:15 -0500 | asked a question | rqt plugin for JointGroupPositionController, or alternatives? rqt plugin for JointGroupPositionController, or alternatives? I'd like to control joint positions of multiple joints on |
| 2022-09-09 19:10:14 -0500 | commented answer | SetuptoolsDeprecationWarning: setup.py install is deprecated. Use build and pip and other standards-based tools. You're right, at the time the question was posted, ROS 2 Humble wasn't yet released :) |
| 2022-09-08 02:13:12 -0500 | received badge | ● Famous Question (source) |
| 2022-09-02 00:26:04 -0500 | received badge | ● Popular Question (source) |
| 2022-09-01 18:02:55 -0500 | commented answer | Listing dependencies in package.xml that are also dependency of dependency Thanks @gvdhoorn! |
| 2022-09-01 18:02:25 -0500 | marked best answer | Listing dependencies in package.xml that are also dependency of dependency I'm interested in hearing about best practice of listing a dependency in package.xml that is already a dependency of another dependency. Let's say I have two packages:
In In this case, Is it better practice to add |
| 2022-09-01 07:26:14 -0500 | asked a question | Listing dependencies in package.xml that are also dependency of dependency Listing dependencies in package.xml that are also dependency of dependency I'm interested in hearing about best practice |
| 2022-08-26 13:10:20 -0500 | received badge | ● Notable Question (source) |
| 2022-08-15 21:21:26 -0500 | received badge | ● Famous Question (source) |
| 2022-08-15 04:15:17 -0500 | received badge | ● Popular Question (source) |
| 2022-08-13 21:09:08 -0500 | received badge | ● Notable Question (source) |
| 2022-07-28 08:08:11 -0500 | received badge | ● Nice Answer (source) |
| 2022-07-23 08:15:50 -0500 | answered a question | [ROS2] How do I pass argument to launch + node or node directly In regards to passing it directly to the ros2 node, you're missing the -p to notify that this is a parameter being passe |
| 2022-07-23 07:44:39 -0500 | received badge | ● Rapid Responder (source) |
| 2022-07-23 07:44:39 -0500 | answered a question | [ROS2][Humble] Issue with colcon build during docs.ros.org tutorial To start off, the warning isn't related to the build not progressing. It's just warning you that the packages you are bu |
| 2022-07-14 07:27:15 -0500 | commented answer | rviz2 does not display an urdf file @Abubakar Would you be able to post a new question (with more details) in ROS Answers and post a link here? |
| 2022-07-10 07:51:35 -0500 | commented answer | [ROS2 foxy] Interactive marker server inside a Rviz plugin @jlack Your issue seems slightly different to the question asked here. Perhaps the solution you're looking for is: https |
| 2022-07-10 07:51:12 -0500 | commented answer | [ROS2 foxy] Interactive marker server inside a Rviz plugin @jlack Your issue seems slightly different to this one, but there is a solution: https://answers.ros.org/question/403587 |
| 2022-07-10 07:50:31 -0500 | marked best answer | Interactive markers not showing in RViz I'm trying to display a cube interactive marker using the interactive_marker_tutorials (have to build from source). Running the cube example: Then, running rviz: Add an interactive marker display with namespace set to |
| 2022-07-10 07:50:25 -0500 | received badge | ● Rapid Responder (source) |
| 2022-07-10 07:50:25 -0500 | answered a question | Interactive markers not showing in RViz The issue is due to no TF data to transform the interactive marker's in the base_link frame to the map frame RViz is try |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.