The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2020-09-12 20:07:37 -0500 | received badge | ● Great Answer (source) |
| 2018-10-17 23:12:39 -0500 | marked best answer | point cloud "box" filtering I just wanted to know if a package doing a "box" filtering already exists. I'd just like to limit the field of view of the Kinect, by removing everything that's not in a given box. I googled a bit and couldn't find an already implemented solution. If it doesn't exist, I guess I can create a node and use the passthrough filter, but I thought it would already be implemented. |
| 2018-10-17 23:12:39 -0500 | received badge | ● Nice Answer (source) |
| 2018-08-14 07:20:15 -0500 | marked best answer | BRIDE compile error talkerConfig.h not found After the great talk during ROSCon, I tried to create a node using BRIDE. The creation of the node went well, I generated the C++ code using BRIDE->ROS->Generate C++ code and it worked fine. The problem I'm having is that when building the project, I get the following error: As you can see, the sr_talkerConfig.h doesn't seem to be generated during compile. Looking in the console from which I started eclipse ( I'm running ubuntu 12.04 64bits. Tried both the default install ( |
| 2018-07-11 04:40:37 -0500 | received badge | ● Nice Question (source) |
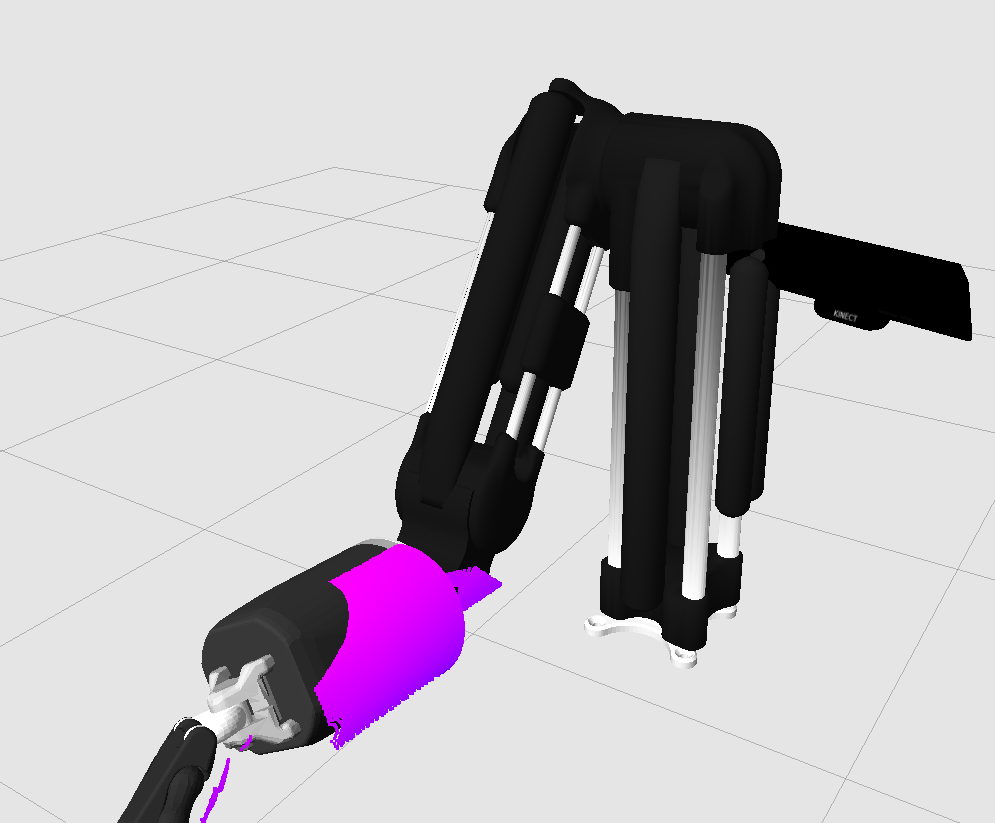
| 2018-04-24 08:42:04 -0500 | marked best answer | Simulated kinect rotation around X [bug?] Hi, In our robot, the Kinect can be mounted on the side of the arm, as shown in the screenshot below. When running the simulation in Fuerte, I found this weird behaviour. As you can observe on the image, the point cloud does not match the robot model (we see a partial image of the hand/arm at the bottom left of the screenshot, which should be on the robot model).
As soon as I rotate the kinect against its X axis (so that the kinect is horizontal as you can see on the second screenshot), then the point cloud and robot model are aligned properly.
The kinect xacro and dae are the one from the turtlebot. I'm simply attaching them with a rotation: The code can be seen on github. Any help is greatly appreciated! |
| 2018-04-24 08:42:04 -0500 | received badge | ● Good Answer (source) |
| 2017-04-30 06:03:38 -0500 | received badge | ● Great Answer (source) |
| 2016-10-24 11:02:48 -0500 | received badge | ● Good Answer (source) |
| 2016-06-13 12:28:10 -0500 | received badge | ● Good Answer (source) |
| 2016-03-14 05:05:25 -0500 | received badge | ● Nice Answer (source) |
| 2016-03-03 09:29:20 -0500 | marked best answer | set revolute joint start angle I'd like to know if it's possible to set a start angle which is not 0 directly in the urdf. By default on our arm, when all the joints are at 0, the arm is pointing down (through the floor if you import it directly in Gazebo, without attaching it to a table). It would be better if I could specify default values for the joint angles. |
| 2016-01-26 00:32:07 -0500 | commented answer | table top segmentation from kinect That is strange, the link to the wiki above works for me. It's not a link to the code directly though, it's a wiki. Let me know if you can access it? |
| 2016-01-06 08:50:29 -0500 | received badge | ● Great Answer (source) |
| 2016-01-06 08:50:29 -0500 | received badge | ● Guru (source) |
| 2016-01-05 09:27:45 -0500 | commented answer | table top segmentation from kinect the tutorial in my answer is really old. You should probably take a look at this: http://wg-perception.github.io/tabletop |
| 2015-11-02 09:31:49 -0500 | received badge | ● Great Question (source) |
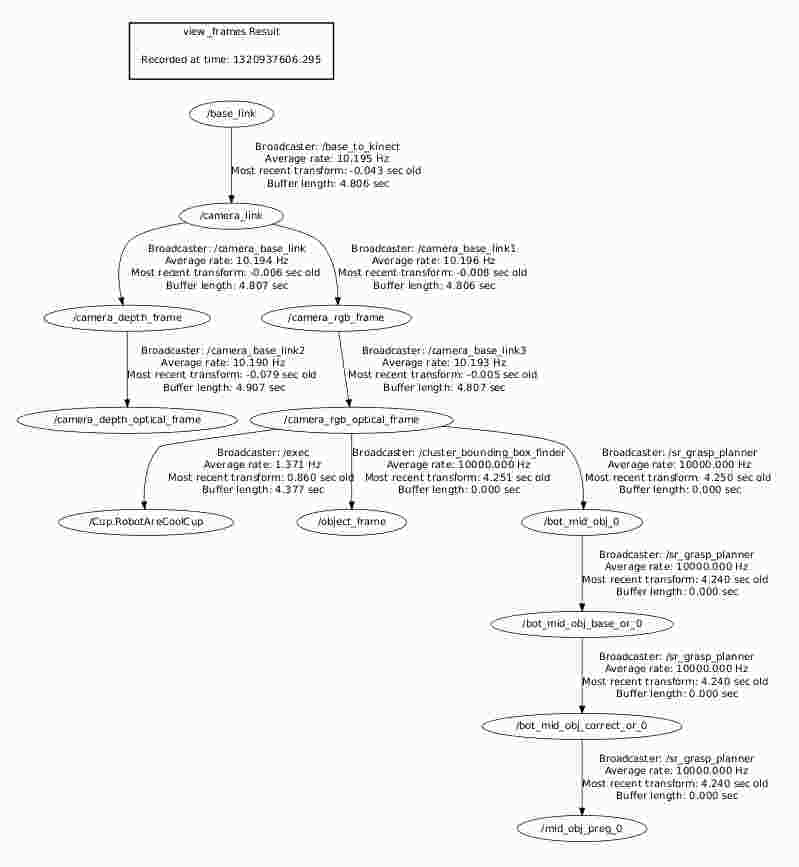
| 2015-05-28 10:51:37 -0500 | marked best answer | tf::TransformListener lookupTransform time error Hi, I'm trying to listen to a transform using a tf::TransformListener, but I get the following error: I don't understand why I'm getting this error: if you look at the 2 time stamps, they're very close, and I initialized my tf_listener with a big buffer of 60seconds. I also ran the view frames, and you can see that there's a transform from /base_link to /mid_obj_preg_0.
The transforms from /camera_rgb_optical_frame to /mid_obj_preg_0 are published by the same tf::TransformBroadcaster. Should I be using one broadcaster per transform? |
| 2015-05-19 13:11:55 -0500 | received badge | ● Notable Question (source) |
| 2015-04-22 00:20:02 -0500 | commented answer | How to publish ROS program? Sorry for the long delay in answering. If you're still looking for a shell script solution we have something like this ( https://github.com/shadow-robot/sr-bu... ). You'll need to modify it to reflect your install obviously. Cheers |
| 2015-04-22 00:17:43 -0500 | commented answer | Using Orocos-BFL in ROS Hi. You should add it to the CMakeLists.txt who uses orocos-bfl. Cheers |
| 2015-04-10 07:30:32 -0500 | received badge | ● Famous Question (source) |
| 2015-03-30 02:18:52 -0500 | received badge | ● Good Answer (source) |
| 2015-03-09 07:07:18 -0500 | answered a question | Cannot find controller Dear Nikitas, This controller is unfortunately deprecated and we haven't had time to update to the new Joint Trajectory Action Controller yet. I reported the issue here. Pull requests are always appreciated :). It is still possible to use the simulated arm and hand using direct position targets through the relevant topics as is. Cheers, Ugo |
| 2015-02-28 14:40:16 -0500 | received badge | ● Good Answer (source) |
| 2015-01-07 12:50:04 -0500 | received badge | ● Nice Answer (source) |
| 2014-12-08 09:30:51 -0500 | received badge | ● Taxonomist |
| 2014-11-27 03:44:27 -0500 | answered a question | How to publish ROS program? There are no "one click install" for ROS as far as I know. You could always send a virtual machine or look at solutions like ansible. We have some ansible configs available here if you're interested. It's a work in progress, mostly for internal use so it's not fully documented but it should hopefully help you get started. |
| 2014-10-31 13:52:03 -0500 | received badge | ● Popular Question (source) |
| 2014-09-05 02:00:24 -0500 | received badge | ● Notable Question (source) |
| 2014-09-04 00:55:54 -0500 | commented answer | Add postinstall rule for deb package creation Thanks for the clarification William! |
| 2014-09-03 16:05:44 -0500 | received badge | ● Nice Question (source) |
| 2014-09-03 16:05:42 -0500 | received badge | ● Popular Question (source) |
| 2014-09-03 14:27:26 -0500 | commented answer | Add postinstall rule for deb package creation great thanks |
| 2014-09-03 03:32:00 -0500 | asked a question | Add postinstall rule for deb package creation I'm trying to get a fork of the pr2-grant released for our ros_ethercat package as we find it very useful. In the pr2 repo, there were some post-install rules to set the sticky bit of pr2-grant. Is there a way to do this with catkin / bloom? Below is the debian/postinst rule Thanks in advance! |
| 2014-08-13 11:39:54 -0500 | received badge | ● Nice Answer (source) |
| 2014-08-13 02:24:13 -0500 | commented answer | Cannot find out arm_control_msgs You'll have at least to integrate your robot with moveit (if it's not done already by someone else). Then it shouldn't too much trouble to adapt your code (just changing the message type might work, not exactly sure of what you're doing). |
| 2014-08-13 02:20:41 -0500 | commented answer | Robot in Rviz flashes.. great, can you accept the answer to close the thread? |
| 2014-08-12 08:19:03 -0500 | answered a question | Robot in Rviz flashes.. This might be due to a bad tf issue (if you have 2 different parent for the robot for example). Can you make sure the published tf are OK? |
| 2014-08-12 06:53:39 -0500 | answered a question | BFL - bind variables from Enrico on BFL mailing list This is a constrained optimization problem. I am afraid there is no "clean" way of doing this. If the state variables are defined by Gaussian pdfs, than by definition those span an infinite support. You could try to make variables outside of the joint limits "highly unlikely" by filtering your measurements, and rejecting those outside a validation area, or carefully defining Process noise and Measurement Noise Covariance Matrices, but if you really want to use constraints, that you're actually solving an Estimation + Constrained Optimization problem, and you'll need different tools for that. |
| 2014-08-12 04:12:22 -0500 | answered a question | Cannot find out arm_control_msgs If I'm not mistaken this has now been replaced by moveit. It should be easy enough to migrate to use moveit, there are extensive tutorials on their website. Hope this helps. |
| 2014-08-11 08:41:17 -0500 | asked a question | BFL - bind variables We're trying to use a Bayesian Filter to do some sensor fusion for estimating the joints positions on a joint based robot. For this we're using the BFL library as is done in the robot-pose-ekf package. We now have two versions of the same filter (one using Feel free to ask for more details as I'm not exactly sure what is most relevant. |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.