The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-08-11 03:55:31 -0500 | received badge | ● Organizer (source) |
| 2023-08-11 02:54:33 -0500 | edited question | Nav2 Simple Action Server always returning ABORTED Nav2 Simple Action Server always returning ABORTED Hello, I'm trying to use the SimpleActionServer class from nav2_utils |
| 2023-08-11 02:46:14 -0500 | edited question | Nav2 Simple Action Server always returning ABORTED Nav2 Simple Action Server always returning ABORTED Hello, I'm trying to use the SimpleActionServer class from nav2_utils |
| 2023-08-11 02:45:53 -0500 | edited question | Nav2 Simple Action Server always returning ABORTED Nav2 Simple Action Server always returning ABORTED Hello, I'm trying to use the SimpleActionServer class from nav2_utils |
| 2023-08-11 02:32:59 -0500 | edited answer | Running ROS2 in a VirtualBOX VM Things I generally check and try in such case: Use "Bridged mode" for the Network Interface in VirtualBox Check that y |
| 2023-08-11 02:32:37 -0500 | edited answer | Running ROS2 in a VirtualBOX VM Things I generally check and try in such case: Use "Bridged mode" for the Network Interface in VirtualBox Check that y |
| 2023-08-11 02:32:02 -0500 | answered a question | Running ROS2 in a VirtualBOX VM Things I generally check and try in such case: Use "Bridged mode" for the Network Interface in VirtualBox Check that y |
| 2023-08-11 02:32:02 -0500 | received badge | ● Rapid Responder (source) |
| 2023-08-11 02:24:14 -0500 | asked a question | Nav2 Simple Action Server always returning ABORTED Nav2 Simple Action Server always returning ABORTED Hello, I'm trying to use the SimpleActionServer class from nav2_utils |
| 2023-08-04 00:33:22 -0500 | received badge | ● Popular Question (source) |
| 2023-07-07 08:24:56 -0500 | received badge | ● Notable Question (source) |
| 2023-06-23 07:44:09 -0500 | edited question | Units for poses used in SMAC planner code Units for poses used in SMAC planner code Hello, While studying the SMAC planner, I got confused by the various units/c |
| 2023-06-23 07:43:25 -0500 | edited question | Units for poses used in SMAC planner code Units for poses used in SMAC planner code Hello, While studying the SMAC planner, I got confused by the various units/c |
| 2023-06-23 07:42:13 -0500 | asked a question | Units for poses used in SMAC planner code Units for poses used in SMAC planner code Hello, While studying the SMAC planner, I got confused by the various units/c |
| 2023-03-31 15:37:57 -0500 | received badge | ● Famous Question (source) |
| 2023-03-24 20:33:54 -0500 | received badge | ● Famous Question (source) |
| 2023-03-24 20:33:54 -0500 | received badge | ● Popular Question (source) |
| 2023-03-24 20:33:54 -0500 | received badge | ● Notable Question (source) |
| 2023-02-13 13:10:42 -0500 | received badge | ● Famous Question (source) |
| 2023-01-30 06:40:59 -0500 | received badge | ● Popular Question (source) |
| 2023-01-28 20:08:18 -0500 | received badge | ● Famous Question (source) |
| 2023-01-12 09:21:40 -0500 | commented question | Images messages not transmitted over network Nope, we still have the problem... however we could improve a bit (cf my edit) by tweaking the DDS config related to soc |
| 2023-01-12 09:21:11 -0500 | commented question | Images messages not transmitted over network Nope, we still have the problem... however we could improve a bit (cf my edit) by tweaking the DDS config related to soc |
| 2023-01-12 09:21:01 -0500 | commented question | Images messages not transmitted over network Nope, we still have the problem... however we could improve a bit (cf my edit) by tweaking the DDS config related to soc |
| 2023-01-12 09:18:14 -0500 | received badge | ● Notable Question (source) |
| 2023-01-10 10:19:50 -0500 | received badge | ● Favorite Question (source) |
| 2023-01-10 10:18:09 -0500 | received badge | ● Nice Question (source) |
| 2023-01-10 10:17:15 -0500 | received badge | ● Popular Question (source) |
| 2022-12-20 07:21:48 -0500 | commented question | rviz2 slows down over time when updating sphere list By any chance, may the particles vector passed in argument not be cleared/reset correctly ? (ie. old particules not upda |
| 2022-12-09 16:42:14 -0500 | received badge | ● Notable Question (source) |
| 2022-11-28 11:43:07 -0500 | asked a question | Architecture: how do you split large nodes Architecture: how do you split large nodes Hi, I often encounter a situation where I'd like to split the code of a nod |
| 2022-11-28 11:43:07 -0500 | asked a question | Architecture: how to split large nodes Architecture: how to split large nodes Hi, I often encounter a situation where I'd like to split the code of a node in |
| 2022-11-10 03:03:16 -0500 | received badge | ● Popular Question (source) |
| 2022-11-09 02:48:49 -0500 | marked best answer | Where does message "Message Filter dropping message" comes from I'm trying to debug find the root cause that generate this kind of error messages: But I could not find in the code for Humble of the whole nav2 repo nor the message_filters any code printing this message, by CTRL+F its keywords like "earlier", "for reason", "Message Filter dropping message"... Where does this message comes from ? |
| 2022-11-08 09:17:31 -0500 | edited question | Where does message "Message Filter dropping message" comes from Where does message "Message Filter dropping message" comes from I'm trying to debug find the root cause that generate th |
| 2022-11-08 09:17:13 -0500 | edited question | Where does message "Message Filter dropping message" comes from Where does message "Message Filter dropping message" comes frome I'm trying to debug find the root cause that generate t |
| 2022-11-08 09:16:40 -0500 | asked a question | Where does message Message Filter dropping message comes frome Where does message Message Filter dropping message comes frome I'm trying to debug find the root cause that generate thi |
| 2022-11-08 09:16:39 -0500 | asked a question | Where does message "Message Filter dropping message" comes from Where does message "Message Filter dropping message" comes frome I'm trying to debug find the root cause that generate t |
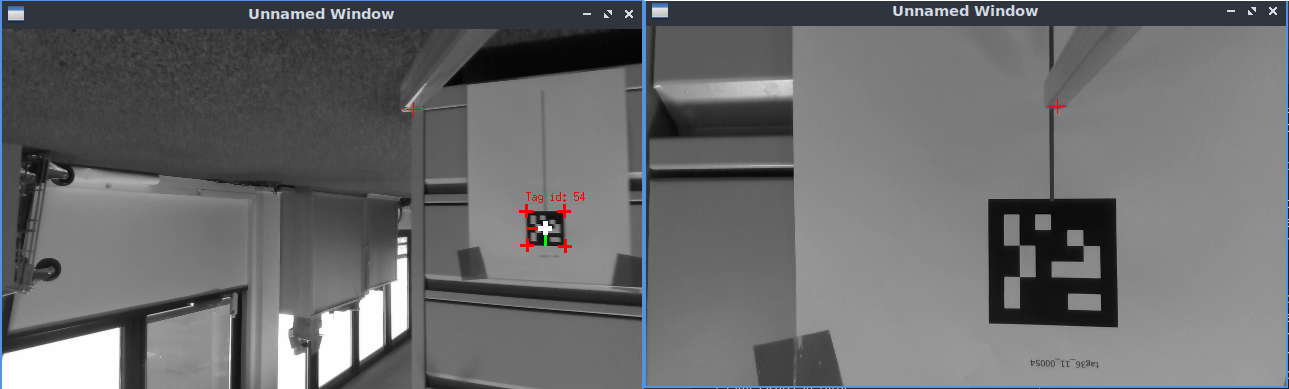
| 2022-10-26 04:20:30 -0500 | marked best answer | AprilTags not detected when close to camera Hello, I can detect AprilTags that are "far" from the camera, ie. small on the image and even a little blur, but the detection fails when the tags are close to the camera and when the image is clean and neat, what is counter-intuitive. Is this expected ? How can I detect the tags at all scales ? NB1: Interestingly, if I increase the "quad-decimate" param form default 1.0 to e.g. 16.0 (to reduce the image resolution), I can detect the "close" tag but not the "far" one (seems logical to not detect the small). NB2: I use the VISP C++ lib directly, not the ROS apriltag packages, and images with 640x360 images
|
| 2022-10-26 03:48:43 -0500 | asked a question | AprilTags not detected when close to camera AprilTags not detected when close to camera Hello, I can detect AprilTags that are "far" from the camera, ie. small on |
| 2022-10-26 03:47:24 -0500 | asked a question | How to detect AprilTags close to camera How to detect AprilTags close to camera Hello, I can detect AprilTags that are "far" from the camera, ie. small on the |
| 2022-10-12 03:59:29 -0500 | edited question | Images messages not transmitted over network Images messages not transmitted over network Hello, I have a RealSense camera that publishes a color stream at 15fps, s |
| 2022-10-12 03:59:29 -0500 | received badge | ● Associate Editor (source) |
| 2022-10-11 10:38:46 -0500 | edited question | Images messages not transmitted over network Images messages not transmitted over network Hello, I have a RealSense camera that publishes a color stream at 15fps, s |
| 2022-10-11 10:36:59 -0500 | asked a question | Images messages not transmitted over network Images messages not transmitted over network Hello, I have a RealSense camera that publishes a color stream at 15fps, s |
| 2022-09-19 09:50:33 -0500 | received badge | ● Notable Question (source) |
| 2022-09-06 09:59:46 -0500 | marked best answer | RegulatedPurePursuitController detected a collision ahead but robot doesn't stop Hello, We are trying to navigate with obstacle avoidance with ROS2 Foxy and we switch from DWB to the freshly released Pure Pursuit Controller in the Navigation2 stack. We set a goal in Rviz several meters in front of the robot, and after it starts moving, we place an obstacle on the path. Then the obstacle is effectively visible in the local costmap, and the look_ahead_point and the look_ahead_arc_path effectively stops at the obstacle: so it is somehow detected. But the robot continue at constant speed until it hits the obstacle We expected it to at least stop in front of the obstacle (or ideally to pass around it). Video showing this behavior: https://www.youtube.com/watch?v=TCGRE... In the console, we get the following messages: I supposed that because the PurePursuitController fails and is aborted, there is no more velocity command published, that would stop the robot or avoid the obstacle. What could cause that ? Is the presence of an obstacle really supposed to raise an error ? Below is the configuration of our PurePursuitController: Thanks for your help, |
| 2022-09-06 09:55:44 -0500 | received badge | ● Student (source) |
| 2022-08-10 09:52:26 -0500 | received badge | ● Notable Question (source) |
| 2022-08-10 09:52:26 -0500 | received badge | ● Famous Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.