The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-07-14 02:42:22 -0500 | received badge | ● Popular Question (source) |
| 2023-07-14 02:42:22 -0500 | received badge | ● Notable Question (source) |
| 2022-05-20 00:50:41 -0500 | marked best answer | Understanding Pointcloud2 data I'm trying to understand the pointcloud2 data extracted from a bag file. The contents of one sample message is as follows: I m just trying to match the numbers here. data [ ] has 1913552 number of elements in it. row_step says there is 1913552 bytes data in data array. There are 4 elements per point: x, y, z, i. Each of 1 byte. Thus the total number of point clouds in this captured message is: 1913552/4 = 478388. But according to explanation given here, "If the cloud is unordered, height is 1 and width is the length of the point cloud.". That is width denotes the total number of point clouds in the message. But above calculated total number of point clouds (478388) is not matching with width(119597) given in message information. Please explain this mismatch/misunderstanding. |
| 2022-03-25 17:22:01 -0500 | received badge | ● Famous Question (source) |
| 2022-02-01 23:04:45 -0500 | received badge | ● Famous Question (source) |
| 2021-12-03 17:19:37 -0500 | received badge | ● Student (source) |
| 2021-11-05 10:28:07 -0500 | received badge | ● Notable Question (source) |
| 2021-09-23 23:01:25 -0500 | commented question | Rendering in Rviz from Panel Plugin @rkeatin3, were you able to achieve point cloud display using MessageFilterDisplay class? |
| 2021-09-23 00:57:41 -0500 | edited question | Using PointCloud2Display class Using PointCloud2Display class How to utilise PointCloud2Display class to display point cloud data on a render panel, I |
| 2021-09-23 00:56:13 -0500 | asked a question | Using PointCloud2Display class Using PointCloud2Display class How to utilise PointCloud2Display class to display point cloud data on a render panel, I |
| 2021-09-21 11:14:29 -0500 | received badge | ● Notable Question (source) |
| 2021-09-17 07:01:28 -0500 | commented question | Cant build the example C++ talker I have tried generating the same error with the same content of your CMakeLists.txt, it is working fine for me. Can you |
| 2021-09-17 06:39:33 -0500 | commented question | Cant build the example C++ talker Please mention the environment details like ROS, OS version, etc. |
| 2021-09-17 04:14:47 -0500 | edited answer | bag to pcd file conversion .pcd files are saved in two formats: 1. bin 2. ASCII This format is chosen while saving the file. If your file is s |
| 2021-09-17 04:00:29 -0500 | edited answer | bag to pcd file conversion .pcd files are saved in two formats: 1. bin 2. ASCII This format is chosen while saving the file. If your file is s |
| 2021-09-17 03:57:42 -0500 | edited answer | bag to pcd file conversion .pcd files are saved in two formats: 1. bin 2. ASCII This format is chosen while saving the file. If your file is s |
| 2021-09-17 03:55:52 -0500 | edited answer | bag to pcd file conversion .pcd files are saved in two formats: 1. bin 2. ASCII This format is chosen while saving the file. If your file is s |
| 2021-09-17 03:52:02 -0500 | answered a question | bag to pcd file conversion pcl::PCDWriter writer; // Save DoN features writer.write<PointXYZI> (outfile, *points, true); } |
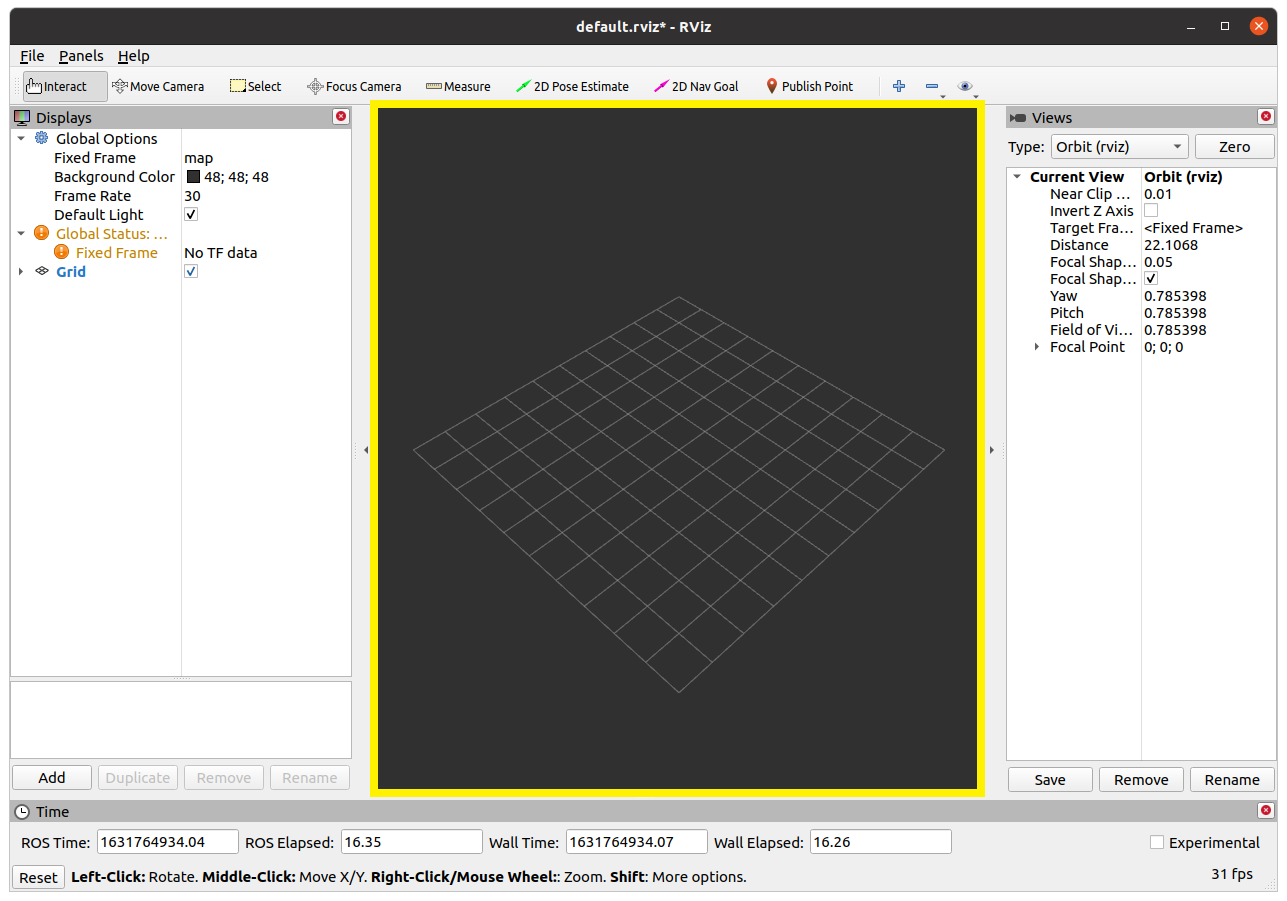
| 2021-09-16 20:16:15 -0500 | marked best answer | Add 3D visualizer in Ros-Qt project I m using ROS noetic in Ubuntu 20.04 with Qt5. I m trying to develop a module to visualize point cloud data on a 3D visualizer. I noticed RViz utilises a 3D visualizer as highlighted in below image:
I m interested to integrate only that window in my Qt project. How can I include it? I have worked earlier on similar project and used VTK library's 3D visualizer window plugin(QVTK Plugin) in Qt. Now I want to replace the VTK library dependency. |
| 2021-09-16 10:59:59 -0500 | received badge | ● Notable Question (source) |
| 2021-09-16 08:36:26 -0500 | commented answer | Add 3D visualizer in Ros-Qt project Thanks @Osilva and @Ranjit Kathiriya, I m going through the RViz project and it is huge, for now I m going to survey, wh |
| 2021-09-16 08:35:40 -0500 | commented answer | Add 3D visualizer in Ros-Qt project Thanks user: Osilva and user: Ranjit Kathiriya, I m going through the RViz project and it is huge, for now I m going to |
| 2021-09-16 08:35:02 -0500 | commented answer | Add 3D visualizer in Ros-Qt project Thanks Osilva and Ranjit Kathiriya, I m going through the RViz project and it is huge, for now I m going to survey, what |
| 2021-09-16 08:34:43 -0500 | commented answer | Add 3D visualizer in Ros-Qt project Thanks @Osilva and @Ranjit Kathiriya, I m going through the RViz project and it is huge, for now I m going to survey, wh |
| 2021-09-16 08:28:50 -0500 | edited question | Add 3D visualizer in Ros-Qt project Add 3D visualizer in Ros-Qt project I m using ROS noetic in Ubuntu 20.04 with Qt5. I m trying to develop a module to vis |
| 2021-09-15 09:04:43 -0500 | received badge | ● Popular Question (source) |
| 2021-09-13 08:38:00 -0500 | commented question | Add 3D visualizer in Ros-Qt project I m aware about the RViz's functionality and visualizing camera and point cloud data in it, I m trying to develop a Qt a |
| 2021-09-13 07:09:06 -0500 | asked a question | Add 3D visualizer in Ros-Qt project Add 3D visualizer in Ros-Qt project I m using ROS noetic in Ubuntu 20.04. I m trying to develop a module to visualize po |
| 2021-09-11 22:22:52 -0500 | marked best answer | IDE to develop rqt projects I have worked with ROS packages earlier which uses catkin environment. I have also worked on Qt projects developed in Qt Creator which does not use catkin environment. |
| 2021-09-11 20:22:46 -0500 | received badge | ● Self-Learner (source) |
| 2021-09-10 03:37:21 -0500 | commented answer | ros_qt project setup Thank you. |
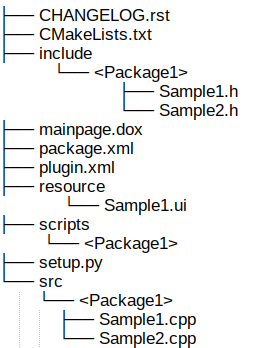
| 2021-09-10 03:36:43 -0500 | marked best answer | ros_qt project setup I m using Qt5 in Ubuntu 20.04 and ROS noetic.
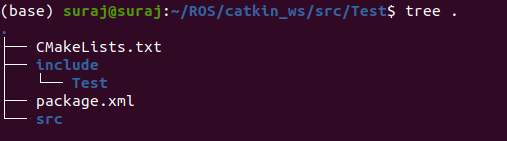
This can also be seen here in a standard ros_qt project. But when I create a ROS package in Qt, following directory structure is created:
Do we have to create other folders and files manually? |
| 2021-09-10 03:30:54 -0500 | received badge | ● Self-Learner (source) |
| 2021-09-10 03:30:54 -0500 | received badge | ● Teacher (source) |
| 2021-09-10 03:30:12 -0500 | commented answer | ros_qt project setup :D, currently not credible enough to do that. |
| 2021-09-09 13:36:08 -0500 | received badge | ● Popular Question (source) |
| 2021-09-09 12:42:14 -0500 | received badge | ● Rapid Responder (source) |
| 2021-09-09 12:42:14 -0500 | answered a question | ros_qt project setup After conducting experiments on the answer provided by @Ranjit Kathiriya , I was able to find that the directory structu |
| 2021-09-09 12:12:05 -0500 | commented answer | ros_qt project setup Another question remains: If I create all files and leave them blank, the Qt Creator doesn't accept them. For example I |
| 2021-09-09 12:11:50 -0500 | commented answer | ros_qt project setup Another question remains: If I create all files and leave them blank, the Qt Creator doesn't accept them. For example I |
| 2021-09-09 12:11:50 -0500 | received badge | ● Commentator |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.