The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-08-03 08:30:21 -0500 | answered a question | not found: local_setup.bash I've found that the reason for this is that, once you source a directory in .bashrc, when colcon build-ing a directory, |
| 2023-07-13 06:26:44 -0500 | commented answer | Executable not found in libexec directory Hey, thanks for the idea, I had the same issue as the OP and this solved it! |
| 2023-07-11 06:34:57 -0500 | commented answer | Unable to transform object from namespaced frame 'ns/base_link' to planning frame 'base_link' @raphael_leber_cpe How I got it working was, I went into the robots .urdf file, and there, by default, would be the link |
| 2023-07-11 06:34:33 -0500 | commented answer | Unable to transform object from namespaced frame 'ns/base_link' to planning frame 'base_link' How I got it working was, I went into the robots .urdf file, and there, by default, would be the link base_link. I renam |
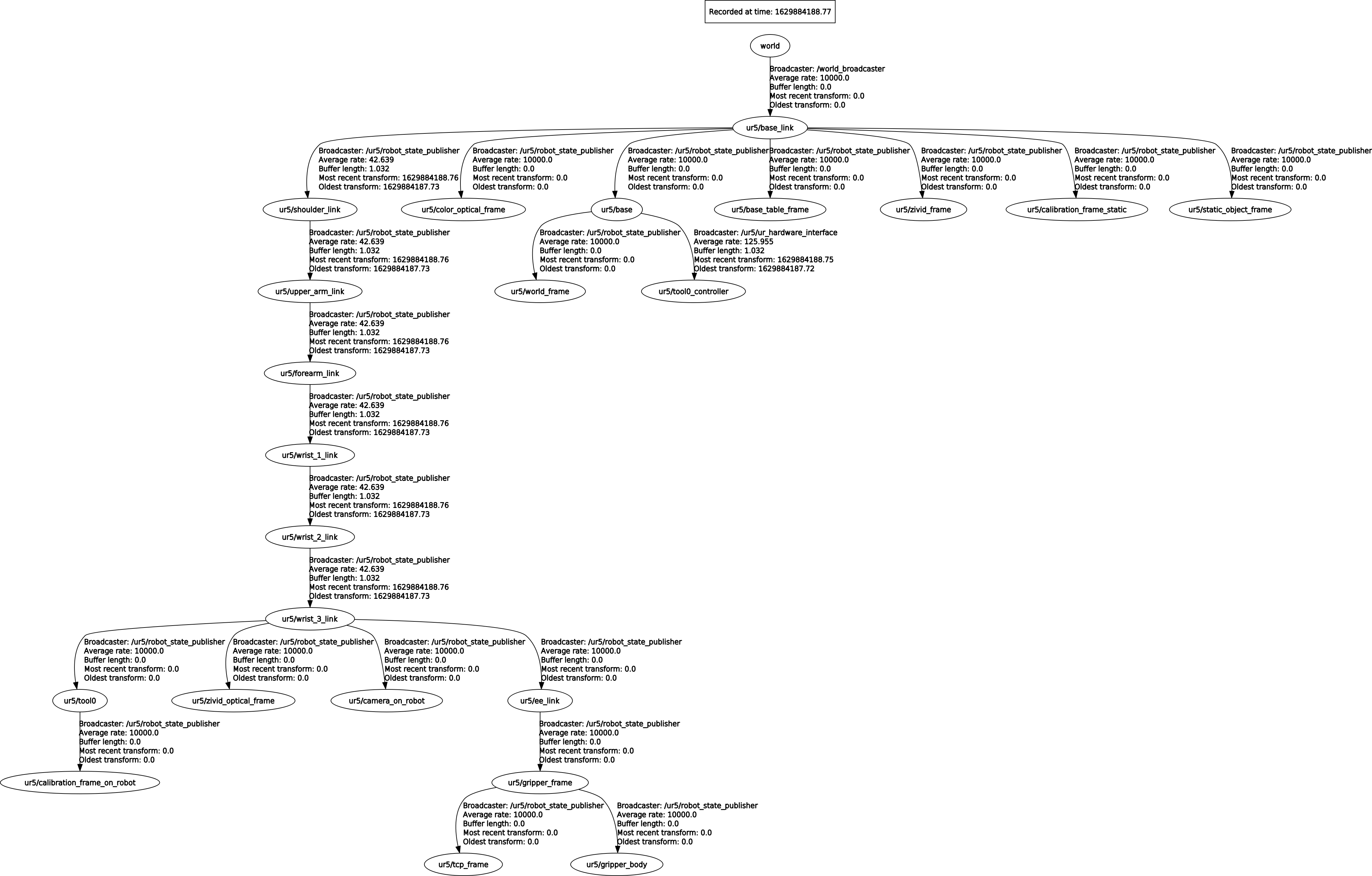
| 2023-07-08 05:12:19 -0500 | marked best answer | Unable to transform object from namespaced frame 'ns/base_link' to planning frame 'base_link' I have a two robot system that is prefixed in separated namespaces so each robot can work independently, but they exist in a single workspace in a connected I run separate move groups for each robot in their own namespace and run C++ code in the same namespace for each robot. Every time a path is planned, I get this warning in the move_group.launch terminal for every frame of the robot. Each robot is namespaced and prefixed at launch, so the name base_link only exists in the UPDATE When computing a Cartesian path, I get a similar error and that blocks code from being executed. Are there any ways to prefix/namespace the planning frame, perhaps in code or any other ways to fix this? UPDATE #2
tf_tree (the second robots tree is the same, but with a different namespace, both connected by the rqt_graph for the same setup
|
| 2023-07-07 04:38:39 -0500 | received badge | ● Famous Question (source) |
| 2023-06-06 10:10:39 -0500 | received badge | ● Notable Question (source) |
| 2023-05-24 15:48:53 -0500 | received badge | ● Popular Question (source) |
| 2023-05-22 06:14:59 -0500 | edited question | Warning: class_loader.ClassLoader: SEVERE WARNING!!! Attempting to unload library while objects created by this loader exist in the heap! Warning: class_loader.ClassLoader: SEVERE WARNING!!! Attempting to unload library while objects created by this loader e |
| 2023-05-21 10:55:38 -0500 | asked a question | Warning: class_loader.ClassLoader: SEVERE WARNING!!! Attempting to unload library while objects created by this loader exist in the heap! Warning: class_loader.ClassLoader: SEVERE WARNING!!! Attempting to unload library while objects created by this loader e |
| 2022-08-10 07:58:27 -0500 | commented question | How to include the ROS_NAMESPACE in the default attribute in a launch file? I would suggest you look at the answer to this question, where the proper syntax for running a node in a namespace. |
| 2022-08-10 07:57:59 -0500 | commented question | How to include the ROS_NAMESPACE in the default attribute in a launch file? I would suggest you look at this link, where the proper syntax for running a node in a namespace. |
| 2022-08-10 07:53:58 -0500 | answered a question | Do you have an idea how to solve the error I am facing while launching the following ros-launch file?! I would suggest you run the node outside of roslaunch to see why it's crashing, but other than that it is hard to pinpoi |
| 2022-07-19 05:40:35 -0500 | received badge | ● Famous Question (source) |
| 2022-04-29 02:47:20 -0500 | commented answer | parameter passed to xacro not changing the default one Yes thank you! In the setup.launch, not only planning_execution.launch launches .xacro down stream, but so does bringup. |
| 2022-04-29 02:44:06 -0500 | marked best answer | parameter passed to xacro not changing the default one I'm trying to make a .xacro file for a UR5e robot, that allows choosing the gripper at launch, which means choosing different macros inside of it and I'm doing it based on the answer here. The setup is based on the ur moveit config so launching the robot goes like this:
I want to change a parameter at Snippet of the xacro code: So I'm trying to pass Snippet from Snippet from Snippet from |
| 2022-04-28 18:44:29 -0500 | received badge | ● Famous Question (source) |
| 2022-04-27 07:59:38 -0500 | commented answer | parameter passed to xacro not changing the default one So I launch for example setup.launch gripper_type:=one which then launches execution.launch, which then launches context |
| 2022-04-27 07:54:52 -0500 | commented answer | parameter passed to xacro not changing the default one I'm not sure I understand this solution. xacro:arg name="gripper_type is defined only in my outer most xacro file, but i |
| 2022-04-27 07:31:13 -0500 | received badge | ● Notable Question (source) |
| 2022-04-27 03:00:15 -0500 | received badge | ● Popular Question (source) |
| 2022-04-27 01:24:32 -0500 | edited question | parameter passed to xacro not changing the default one xacro passed parameter not changing the default one I'm trying to make a .xacro file for a UR5e robot, that allows choos |
| 2022-03-14 01:54:01 -0500 | commented question | parameter passed to xacro not changing the default one @tryan gripper_type is the variable I've added in xacro. It has values "other" and "robotiq". I wasn't able to launch it |
| 2022-03-13 06:35:52 -0500 | commented question | parameter passed to xacro not changing the default one @tryan I run it with roslaunch, if it's of some importance, the roscore is on a second computer and they are connected t |
| 2022-03-10 08:43:50 -0500 | asked a question | parameter passed to xacro not changing the default one xacro passed parameter not changing the default one I'm trying to make a .xacro file for a UR5e robot, that allows choos |
| 2022-01-18 03:29:08 -0500 | commented question | How to spawn 2 ur16e arms in gazebo and rviz? I would suggest adding a static transformer in your launch files for each robot like so: <node pkg="tf2_ros" type="s |
| 2022-01-18 03:24:45 -0500 | commented question | How to spawn 2 ur16e arms in gazebo and rviz? I would suggest adding a static transformer in your launch files for each robot like so: <node pkg="tf2_ros" type="s |
| 2022-01-18 03:24:00 -0500 | commented question | How to spawn 2 ur16e arms in gazebo and rviz? I would suggest adding a static transformer in your launch files for each robot like so: <node pkg="tf2_ros" type="s |
| 2022-01-18 03:23:44 -0500 | commented question | How to spawn 2 ur16e arms in gazebo and rviz? I would suggest adding a static transformer in your launch files for each robot like so: <node pkg="tf2_ros" type="s |
| 2022-01-18 03:23:44 -0500 | received badge | ● Commentator |
| 2022-01-14 11:26:08 -0500 | received badge | ● Nice Answer (source) |
| 2022-01-14 02:59:11 -0500 | edited question | Connect to multiple namespaced movegroups from single C++ node Connect to multiple namespaced movegroups from single C++ node I am working on a two robot set up that uses SMACC state |
| 2022-01-10 08:20:43 -0500 | edited answer | How to Move the robot in joint and Cartesian Space? I would suggest going through these MoveIt! tutorials! Edit 1(updated context): In the case of a UR5 robot, you would f |
| 2022-01-10 06:19:29 -0500 | answered a question | How to Move the robot in joint and Cartesian Space? I would suggest going through these MoveIt! tutorials! |
| 2022-01-10 06:19:29 -0500 | received badge | ● Rapid Responder (source) |
| 2022-01-08 13:16:16 -0500 | answered a question | How does one get the x and y coordinates of a robot? This is a very open, non-specific question, so I can only answer about what I find most useful. If you use MoveIt! you s |
| 2022-01-07 02:38:01 -0500 | answered a question | MoveGroupInterface /robot_description not found Perhaps in move_group_options try changing /robot_description to robot_description. It appears that you use some namespa |
| 2022-01-07 02:38:01 -0500 | received badge | ● Rapid Responder (source) |
| 2022-01-06 01:33:19 -0500 | marked best answer | Connect to multiple namespaced movegroups from single C++ node I am working on a two robot set up that uses SMACC state machines in C++, with MoveIt!. In order to control multiple robots from a state machine, I need to run the state machine in a node that is reachable by both robots, but to run multiple I am wondering if there is a way to connect to
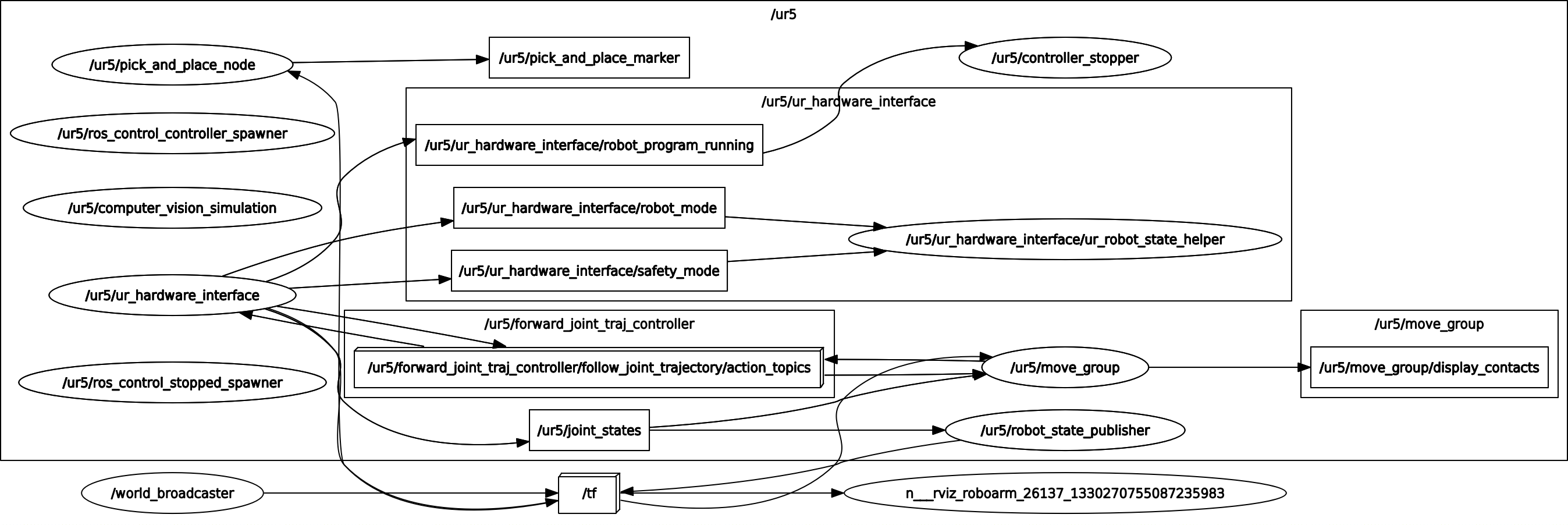
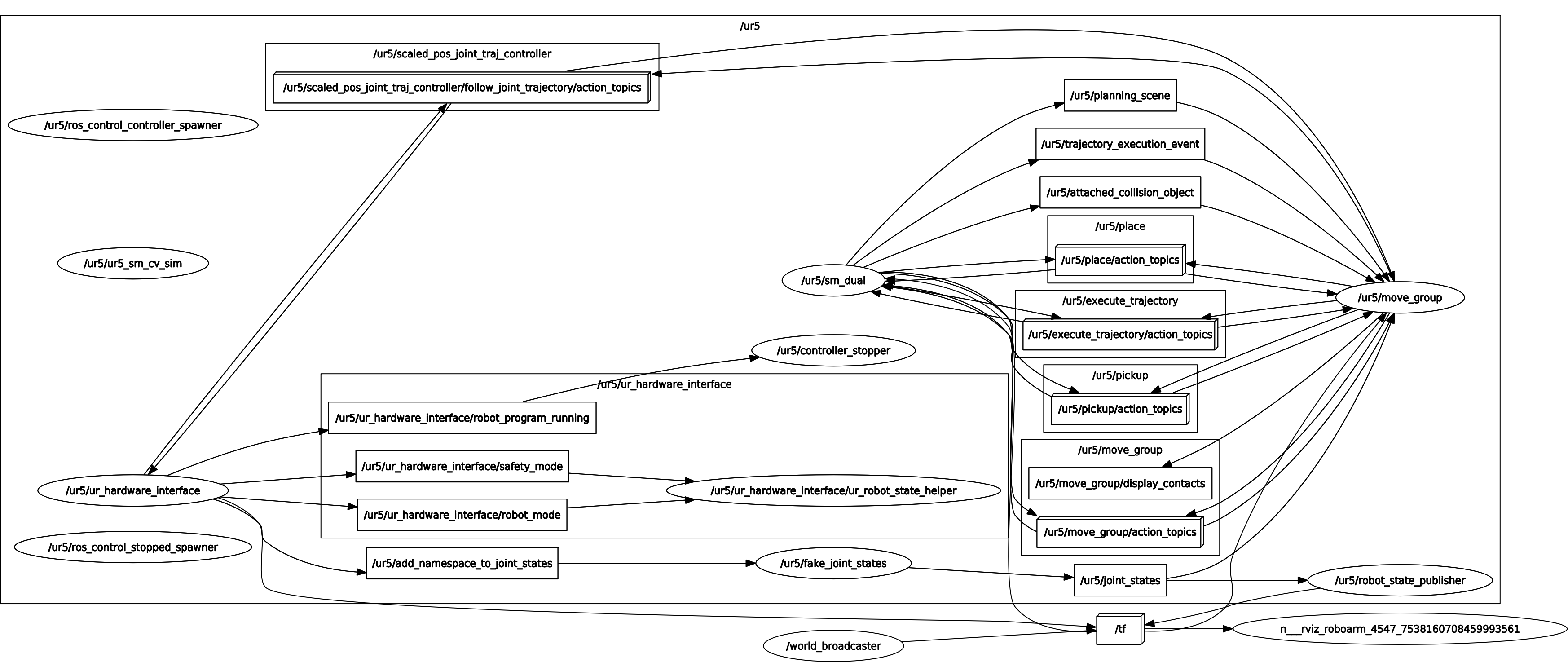
rqt_graph showing the node connected to
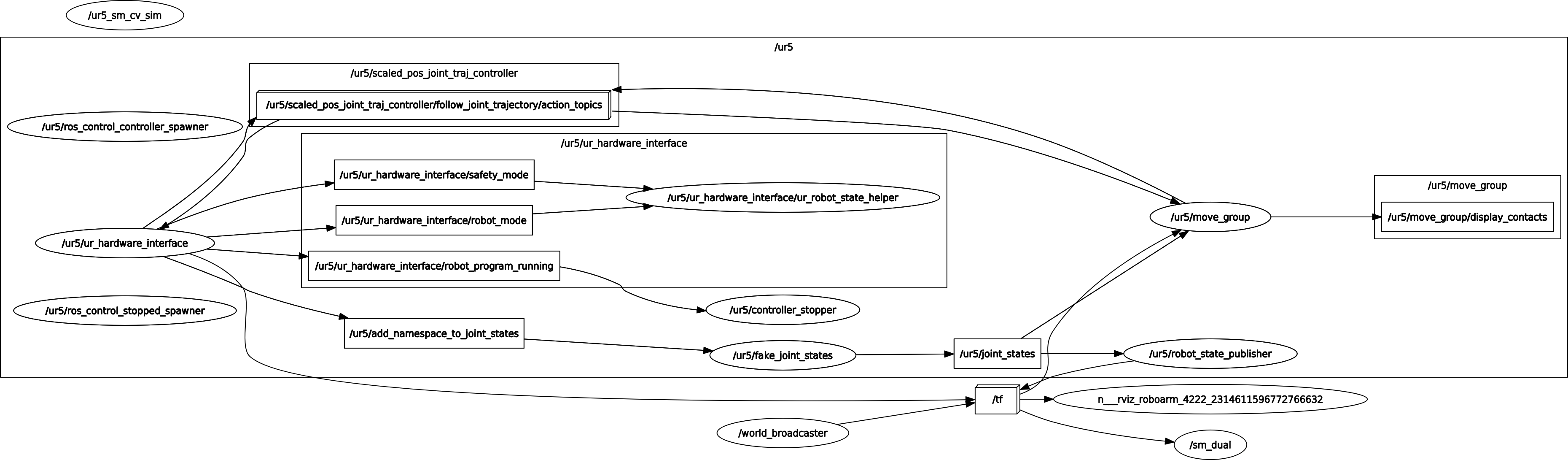
rqt_graph showing the node outside of the namespace Edit 1: move_group_interface.h seems to have a Edit 2: Disregard opinion in Edit 1! Related links: |
| 2022-01-06 01:33:09 -0500 | commented answer | Connect to multiple namespaced movegroups from single C++ node Yes, thank you so much, I got it working! So the syntax would be ros::NodeHandle nh("/ur5"); moveit::planning_interface |
| 2022-01-05 03:58:25 -0500 | received badge | ● Notable Question (source) |
| 2022-01-05 01:27:58 -0500 | edited question | Connect to multiple namespaced movegroups from single C++ node Connect to multiple namespaced movegroups from single C++ node I am working on a two robot set up that uses SMACC state |
| 2022-01-05 01:14:41 -0500 | commented answer | Connect to multiple namespaced movegroups from single C++ node Do you mean to create for example ros::NodeHandle nh{/ns}; and pass it to the MoveGroupInterface constructor? That seems |
| 2022-01-04 01:49:59 -0500 | received badge | ● Popular Question (source) |
| 2022-01-03 02:59:54 -0500 | edited question | Connect to multiple namespaced movegroups from single C++ node Connect to multiple namespaced movegroups from single node I am working on a two robot set up that uses SMACC state mach |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.