The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2024-03-04 07:42:25 -0500 | received badge | ● Famous Question (source) |
| 2023-07-31 14:10:04 -0500 | received badge | ● Popular Question (source) |
| 2023-07-17 01:24:13 -0500 | commented question | How to debug message filter problems? Filter dropping message for unknown reason Thank you for that caveat! I'll have a look on the best-practices. ATM the robots URDF is not in the final configuration |
| 2023-07-13 09:16:14 -0500 | asked a question | How to debug message filter problems? Filter dropping message for unknown reason How to debug message filter problems? Filter dropping message for unknown reason I have a simulated camera in Gazebo and |
| 2023-06-27 06:36:38 -0500 | received badge | ● Notable Question (source) |
| 2023-06-27 06:36:38 -0500 | received badge | ● Popular Question (source) |
| 2023-06-06 07:17:13 -0500 | received badge | ● Notable Question (source) |
| 2023-05-29 17:17:18 -0500 | received badge | ● Famous Question (source) |
| 2023-04-21 13:55:51 -0500 | received badge | ● Nice Question (source) |
| 2023-03-10 08:40:04 -0500 | edited question | How to load Moveit motion planning pipelines How to load Moveit motion planning pipelines Greetings. I want to use the default OMPL pipeline side-by-side with the Pi |
| 2023-03-10 01:28:24 -0500 | received badge | ● Organizer (source) |
| 2023-03-10 01:27:19 -0500 | edited question | How to load Moveit motion planning pipelines How to load Moveit motion planning pipelines Greetings. I want to use the default OMPL pipeline side-by-side with the Pi |
| 2023-03-07 04:35:13 -0500 | edited question | How to load Moveit motion planning pipelines How to load Moveit motion planning pipelines Greetings. I want to use the default OMPL pipeline side-by-side with the Pi |
| 2023-03-07 04:35:03 -0500 | edited question | How to load Moveit motion planning pipelines Moveit motion planning pipelines Greetings. I want to use the default OMPL pipeline side-by-side with the Pilz industral |
| 2023-03-07 02:28:24 -0500 | received badge | ● Famous Question (source) |
| 2023-03-06 02:05:49 -0500 | received badge | ● Notable Question (source) |
| 2023-03-04 00:21:22 -0500 | received badge | ● Popular Question (source) |
| 2023-03-01 09:37:08 -0500 | edited question | How to load Moveit motion planning pipelines Moveit motion planning pipelines Greetings. I want to use the default OMPL pipeline side-by-side with the Pilz industral |
| 2023-03-01 09:30:03 -0500 | asked a question | How to load Moveit motion planning pipelines Moveit motion planning pipelines Greetings. I want to use the default OMPL pipeline side-by-side with the Pilz industral |
| 2023-02-14 07:14:08 -0500 | received badge | ● Famous Question (source) |
| 2023-01-24 05:13:39 -0500 | received badge | ● Notable Question (source) |
| 2023-01-24 05:13:39 -0500 | received badge | ● Famous Question (source) |
| 2023-01-23 07:46:20 -0500 | asked a question | How to switch planning group with MoveIts MoveGroupInterface How to switch planning group with MoveIts MoveGroupInterface Greetings. I want to control a robot (UR10) with the MoveIt |
| 2023-01-23 03:53:47 -0500 | received badge | ● Popular Question (source) |
| 2023-01-11 01:47:30 -0500 | received badge | ● Notable Question (source) |
| 2023-01-10 10:05:45 -0500 | asked a question | MoveIt planned path visualisation MoveIt planned path visualisation TL;dr What is the most straight forward way to visualize a path planned by moveit::pla |
| 2022-12-25 15:33:08 -0500 | received badge | ● Famous Question (source) |
| 2022-12-23 08:53:26 -0500 | marked best answer | Actions and nested goal states Greetings. Since it is possible that a array is a data structure for an action goal, I would assume that more complex data structures may also be possible. I would like to give my action server a list of poses so it can calculate and execute a path. How can I define a nested data structure inside my action in order to hold the poses? |
| 2022-12-23 07:50:30 -0500 | asked a question | Actions and nested goal states Actions and nested goal states Greetings. Since it is possible that a array is a data structure for an action goal, I wo |
| 2022-12-16 12:19:14 -0500 | received badge | ● Notable Question (source) |
| 2022-12-11 07:45:00 -0500 | received badge | ● Popular Question (source) |
| 2022-12-09 07:23:53 -0500 | received badge | ● Popular Question (source) |
| 2022-12-06 04:19:18 -0500 | asked a question | gazebo_ros2_control failed to load controllers gazebo_ros2_control failed to load controllers Tl;dr How to load controllers with the gazebo_ros2_plugin? Greetings. I |
| 2022-12-06 03:38:28 -0500 | edited question | How to debug Plugins How to debug Plugins Greetings. Due to some errors which appear to be caused by missing plugins, I am searching for a wa |
| 2022-12-05 09:34:01 -0500 | edited question | How to debug Plugins How to debug Plugins Greetings. Due to some errors which appear to be caused by missing plugins, I am searching for a wa |
| 2022-12-05 09:33:47 -0500 | asked a question | How to debug Plugins How to debug Plugins Greeting. Due to some errors which appear to be caused by missing plugins, I am searching for a way |
| 2022-11-28 15:27:06 -0500 | received badge | ● Popular Question (source) |
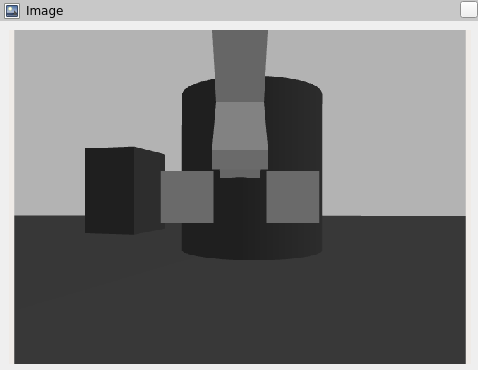
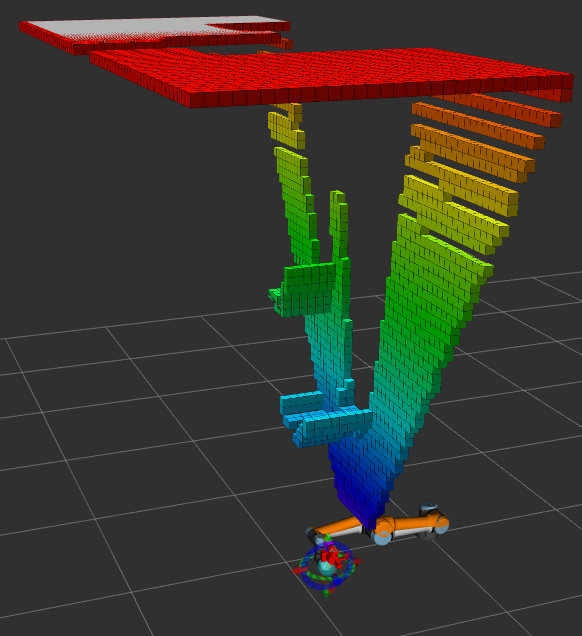
| 2022-11-28 09:07:14 -0500 | marked best answer | Point cloud misaligned with gazebo sensor plugin Greetings. I have inserted a camera within my gazebo simulation via the gazebo plugin. The camera works as intended, however the point cloud generated does not match the camera picture. Since Octomaps are build on the point cloud the collision map is also misaligned. I've aligned the gazebo camera plugin via optical link to the camera link (mesh and collision). How do I get the proper orientation of the point cloud? - Since the picture in RViz matches the viewed object I would assume the point cloud would behave the same.
Camera macro: |
| 2022-11-28 09:06:34 -0500 | answered a question | Point cloud misaligned with gazebo sensor plugin Thank you for your answers. It seems, that Gazebo has an issue with the plugin. For as long the problem remains relevan |
| 2022-11-28 02:17:05 -0500 | commented answer | Point cloud misaligned with gazebo sensor plugin That is true. How do I adjust for the ROS convention and keep the camera image where it is? - If I change the orientatio |
| 2022-11-28 01:39:01 -0500 | commented answer | Point cloud misaligned with gazebo sensor plugin That is true. How do I adjust for the ROS convention and keep the camera image where it is? - If I change the orientatio |
| 2022-11-25 09:08:14 -0500 | edited answer | Depth Camera Gazebo11 + ROS2 Foxy You are correct with the usage of libgazebo_ros_camera.so, based from the name I believe libgazebo_ros_openni_kinect.so |
| 2022-11-25 09:02:49 -0500 | answered a question | Depth Camera Gazebo11 + ROS2 Foxy You are correct with the usage of libgazebo_ros_camera.so, based from the name I believe libgazebo_ros_openni_kinect.so |
| 2022-11-25 08:25:01 -0500 | received badge | ● Notable Question (source) |
| 2022-11-25 08:21:24 -0500 | edited question | Point cloud misaligned with gazebo sensor plugin Point cloud misaligned with gazebo sensor plugin Greetings. I have inserted a camera within my gazebo simulation via the |
| 2022-11-25 08:20:02 -0500 | asked a question | Point cloud misaligned with gazebo sensor plugin Point cloud misaligned with gazebo sensor plugin Greetings. I have inserted a camera within my gazebo simulation via the |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.