The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-01-28 23:11:34 -0500 | received badge | ● Favorite Question (source) |
| 2021-10-31 20:16:20 -0500 | received badge | ● Famous Question (source) |
| 2021-10-14 07:50:21 -0500 | received badge | ● Notable Question (source) |
| 2021-10-14 07:50:21 -0500 | received badge | ● Famous Question (source) |
| 2021-09-13 01:53:10 -0500 | received badge | ● Notable Question (source) |
| 2021-07-19 04:57:25 -0500 | received badge | ● Popular Question (source) |
| 2021-07-12 17:58:46 -0500 | commented answer | Robot spawn at a wrong location in rviz Thanks. I fixed this by setting the fixed frame w.r.t. base_footprint rather than base_link. |
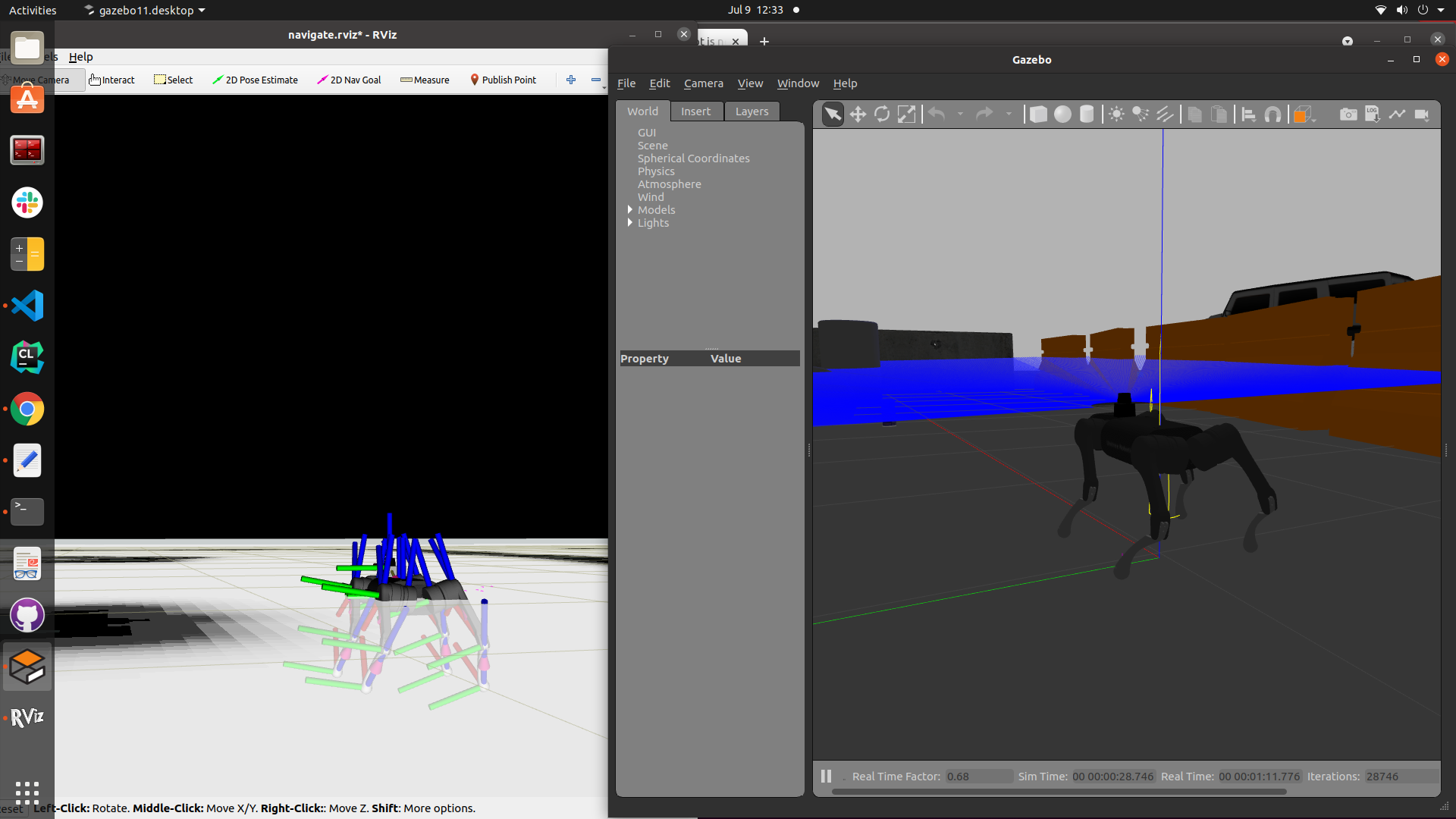
| 2021-07-12 17:58:01 -0500 | marked best answer | Robot spawn at a wrong location in rviz I have a quadruped model that I have made it to spawn in gazebo successfully with contact sensing. However, when I launch the file in rviz using below snippet in my launch file, the robot spawns in rviz in a way that its foot is not touching the ground but the body is rather floating on the XY plane. (Picture attached). What could be my issue? URDF seems fine since the model spawns successfully in gazebo, but it just seems wrong in rviz.
|
| 2021-07-12 17:58:00 -0500 | received badge | ● Scholar (source) |
| 2021-07-09 11:38:01 -0500 | asked a question | Robot spawn at a wrong location in rviz Robot spawn at a wrong location in rviz I have a quadruped model that I have made it to spawn in gazebo successfully wit |
| 2021-07-09 11:34:47 -0500 | received badge | ● Popular Question (source) |
| 2021-07-04 09:41:28 -0500 | received badge | ● Famous Question (source) |
| 2021-06-30 16:13:27 -0500 | asked a question | ROS1 to ROS2 CMakeLists.txt Conversion Issues ROS1 to ROS2 CMakeLists.txt Conversion Issues Hello. I am working on Ubuntu 20.04 on Intel NUC device (amd64). Most of m |
| 2021-06-12 15:35:25 -0500 | received badge | ● Necromancer (source) |
| 2021-06-12 15:35:25 -0500 | received badge | ● Teacher (source) |
| 2021-04-27 06:17:52 -0500 | received badge | ● Popular Question (source) |
| 2021-04-27 06:17:52 -0500 | received badge | ● Notable Question (source) |
| 2021-04-07 19:57:26 -0500 | commented answer | move_base local planner deviates significantly from global planner path If you have used amcl, I would like some help! I have already generated pgm & yaml file for my environment (the plac |
| 2021-04-07 19:54:54 -0500 | commented answer | move_base local planner deviates significantly from global planner path Hi Tootyboi95. Good to hear from you! I am not sure how your A1 was configured, but we got it with SLAMTEC S1 lidar opt |
| 2021-04-05 16:28:58 -0500 | answered a question | move_base local planner deviates significantly from global planner path Hello! I am also working with Unitree A1's slamtec package, and have been struggling to get there navigation stack to w |
| 2021-03-16 14:43:16 -0500 | received badge | ● Enthusiast |
| 2021-03-15 10:45:46 -0500 | received badge | ● Supporter (source) |
| 2021-03-15 10:45:34 -0500 | commented question | hector_slam loses track of robot rotation I am having a similar issue with hectorslam. My robot does okay when moving forward / backward but as soon as it turns, |
| 2021-03-15 10:42:35 -0500 | received badge | ● Famous Question (source) |
| 2021-03-15 10:42:35 -0500 | received badge | ● Notable Question (source) |
| 2021-03-15 10:42:35 -0500 | received badge | ● Popular Question (source) |
| 2021-03-14 22:04:39 -0500 | edited question | Recommendations for visual-inertial-lidar odometry pipeline for legged robots Recommendations for visual-inertial-lidar odometry pipeline for legged robots Hello. I am working on robotics project m |
| 2021-03-14 22:04:22 -0500 | edited question | Recommendations for visual-inertial-lidar odometry pipeline for legged robots Recommendations for visual-inertial-lidar odometry pipeline for legged robots Hello. I am working on robotics project m |
| 2021-03-14 22:04:22 -0500 | received badge | ● Editor (source) |
| 2021-03-14 22:04:06 -0500 | edited question | Recommendations for visual-inertial-lidar odometry pipeline for legged robots Recommendations for visual-inertial-lidar odometry pipeline for legged robots Hello. I am working on robotics project m |
| 2021-03-14 21:58:32 -0500 | asked a question | Recommendations for visual-inertial-lidar odometry pipeline for legged robots Recommendations for visual-inertial-lidar odometry pipeline for legged robots Hello. I am working on robotics project m |
| 2021-02-03 05:54:36 -0500 | received badge | ● Student (source) |
| 2021-02-01 09:34:33 -0500 | asked a question | No module named 'Cryptodomex' error when running rosmsg show No module named 'Cryptodomex' error when running rosmsg show My system is ROS melodic / Ubuntu 18.04. I tried to do ro |
| 2021-02-01 09:34:33 -0500 | answered a question | No module named 'Cryptodomex' error when running rosmsg show I was able to solve this issue by replacing the first line in the file at "/opt/ros/melodic/bin/rosmsg" Previous: #!/usr |
| 2021-01-31 12:45:41 -0500 | received badge | ● Rapid Responder (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.