The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-01-12 19:46:04 -0500 | received badge | ● Notable Question (source) |
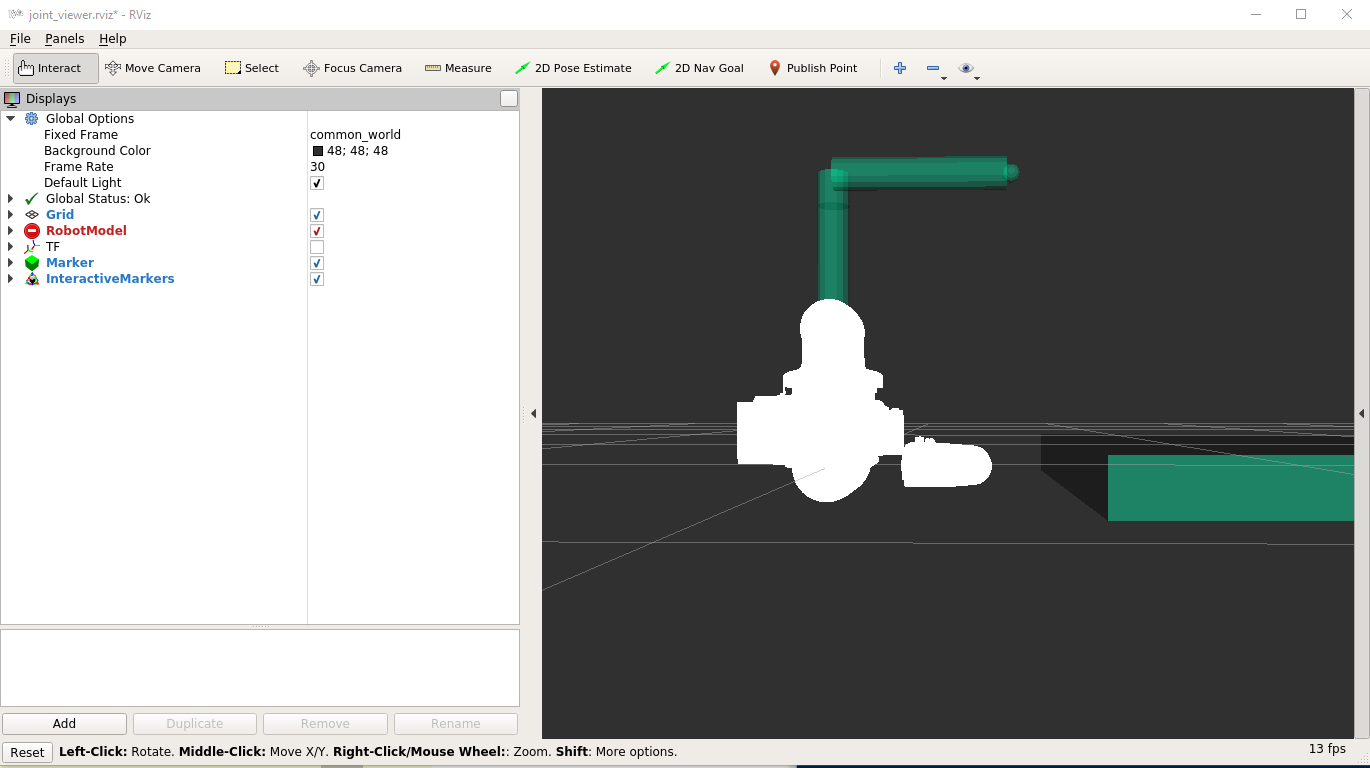
| 2021-01-12 10:40:15 -0500 | marked best answer | rvis doesn't draw model correctly I'm using ROS Kinetic via a Docker image on my Windows 10 machine. I have xserver setup so I can run GUIs. When I run RVIS and load the URDF for my IRB 120 it draws the mesh incorrectly. I tried a fix posted in another thread but it didn't work. Any ideas? I've uploaded the image of what draws. please note I've tried *export LC_NUMERIC="en_US.UTF-8" * |
| 2021-01-12 10:37:34 -0500 | commented question | rvis doesn't draw model correctly solved by changing my fixed frame to base from common_world |
| 2021-01-12 10:29:24 -0500 | commented question | rvis doesn't draw model correctly Error on the RobotModel is No transform from [base] to [common_world] and that repeats for each joint |
| 2021-01-12 10:28:11 -0500 | commented question | rvis doesn't draw model correctly I am running a joint state publisher |
| 2021-01-12 10:18:34 -0500 | commented question | rvis doesn't draw model correctly I'm referring to export LC_NUMERIC="en_US.UTF-8" which is posted as a solve in another almost identical thread of a robo |
| 2021-01-12 09:42:44 -0500 | edited question | rvis doesn't draw model correctly rvis doesn't draw model correctly I'm using ROS Kinetic via a Docker image on my Windows 10 machine. I have xserver set |
| 2021-01-12 01:51:54 -0500 | commented question | rvis doesn't draw model correctly not sure. the tube representation of the bot renders correctly and moves like it should. I'll try. |
| 2021-01-11 22:20:33 -0500 | received badge | ● Popular Question (source) |
| 2021-01-11 11:04:37 -0500 | asked a question | rvis doesn't draw model correctly rvis doesn't draw model correctly I'm using ROS Kinetic via a Docker image on my Windows 10 machine. I have xserver set |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.