The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-08-07 21:10:29 -0500 | received badge | ● Famous Question (source) |
| 2022-07-03 20:09:28 -0500 | marked best answer | Using ROS1 Bridge to Communicate between ROS1 and ROS2 I am trying to use ROS1 Bridge to work with ROS1 nodes from within ROS2 (Dashing) inside the docker environment (ADE). PS. I want to use ROS2 inside the docker environment and communicate with ROS1 nodes outside the docker. I am using Ubuntu 18.04 Is there a good documentation available for enabling the use of the ROS bridge inside the docker environment? Thank you. |
| 2022-01-13 10:01:03 -0500 | received badge | ● Favorite Question (source) |
| 2021-10-09 05:10:39 -0500 | marked best answer | Installing rqt_graph in ROS2 Dashing I am trying to install rqt_graph for ROS2 to visualize the ROS nodes and the computation graph. I have ROS2 dashing installed in the docker (using the Autoware.Auto class/tutorial) After entering ade and sourcing the setup.bash in Autoware.Auto, I use the following command: sudo apt-get install ros2-dashing-rqt_graph and I get the following error: Unable to locate package ros2-dashing-rqt-graph Could anyone help me out here? Thank you! |
| 2021-08-24 07:59:50 -0500 | received badge | ● Famous Question (source) |
| 2021-05-26 02:24:44 -0500 | received badge | ● Famous Question (source) |
| 2021-04-26 04:38:15 -0500 | received badge | ● Famous Question (source) |
| 2021-04-09 19:03:13 -0500 | received badge | ● Famous Question (source) |
| 2021-03-30 01:29:04 -0500 | received badge | ● Famous Question (source) |
| 2021-03-28 22:10:35 -0500 | received badge | ● Famous Question (source) |
| 2021-03-26 04:57:23 -0500 | received badge | ● Famous Question (source) |
| 2021-03-16 11:10:56 -0500 | received badge | ● Famous Question (source) |
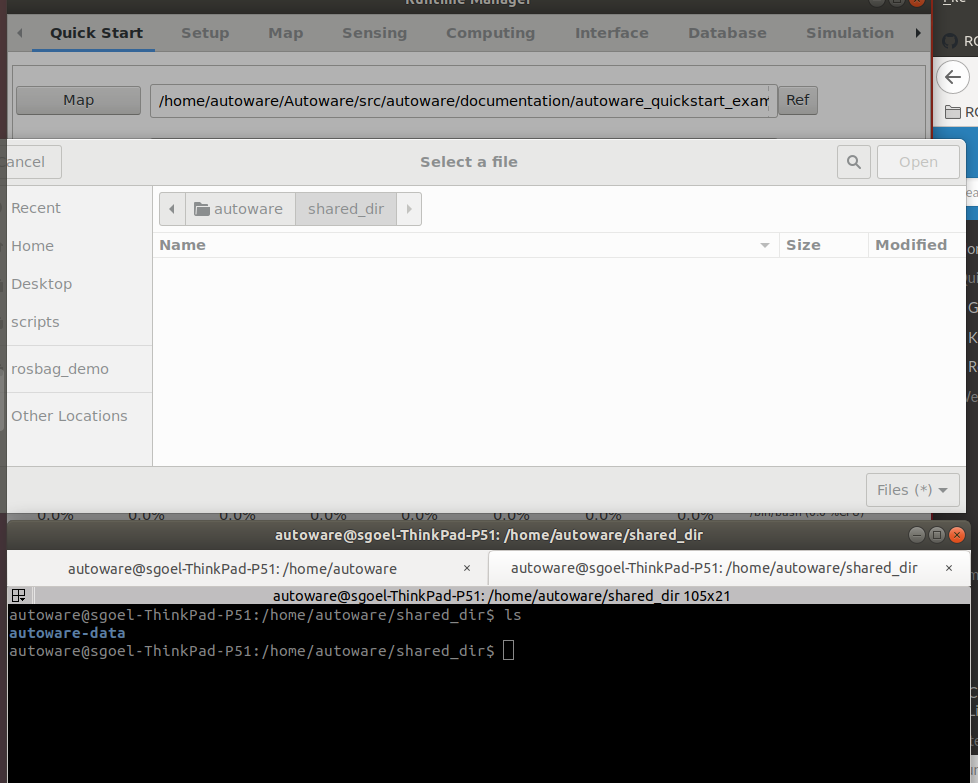
| 2021-03-15 13:20:07 -0500 | marked best answer | Cannot Locate files inside Runtime Manager for Autoware.AI I am trying to follow the documentation to use the LGSVL simulator with Autoware.AI from here: https://www.lgsvlsimulator.com/docs/a... PS. I have followed the steps for the installation of docker and the shared-directory from the above link as well. I navigate inside the Autoware folder by typing Then I run the "run.sh" script by typing After starting the run-time manager inside the docker, I am trying to load the files from autoware-data for the LGSVL simulator. However, the run-time manager is not able to locate any of these files from the shared-dir inside Autoware. (I have even tried to check the option for hidden files) When I try to navigate to the folder "share-dir" from the command terminal, I can see the folder autoware-data and it contains all the files. See the screenshot below for reference. PS. The only files that the run-time manager cannot locate and use are from the below specified path: Any suggestions on why the run-time manager is not able to locate these files?
Thanks! |
| 2021-03-14 03:08:32 -0500 | received badge | ● Notable Question (source) |
| 2021-03-01 22:59:41 -0500 | received badge | ● Notable Question (source) |
| 2021-03-01 08:00:55 -0500 | commented question | Cannot Locate files inside Runtime Manager for Autoware.AI I have already put files in the host ~/shared_dir and I am able to locate them inside the docker container from the comm |
| 2021-03-01 07:59:51 -0500 | commented question | Cannot Locate files inside Runtime Manager for Autoware.AI I have already put files in the host ~/shared_dir and I am able to locate them inside the docker container from the comm |
| 2021-03-01 07:59:25 -0500 | commented question | Cannot Locate files inside Runtime Manager for Autoware.AI I have already put files in the host ~/shared_dir and I am able to locate them inside the docker from the command line t |
| 2021-03-01 07:01:30 -0500 | commented question | Cannot Locate files inside Runtime Manager for Autoware.AI Yes, I have the dir ~/shared_dir on the host machine as well, but I am unable to access that directory from within the r |
| 2021-03-01 07:01:14 -0500 | commented question | Cannot Locate files inside Runtime Manager for Autoware.AI Yes, I have the dir ~/shared_dir on the host machine as well, but I am unable to access that directory from within the r |
| 2021-03-01 03:04:38 -0500 | received badge | ● Notable Question (source) |
| 2021-02-28 05:44:11 -0500 | received badge | ● Popular Question (source) |
| 2021-02-26 10:02:21 -0500 | edited question | Cannot Locate files inside Runtime Manager for Autoware.AI Cannot Locate files inside Runtime Manager for Autoware.AI I am trying to follow the documentation to use the LGSVL simu |
| 2021-02-26 10:00:34 -0500 | asked a question | Cannot Locate files inside Runtime Manager for Autoware.AI Cannot Locate files inside Runtime Manager for Autoware.AI I am trying to follow the documentation to use the LGSVL simu |
| 2021-02-25 08:40:06 -0500 | commented answer | Incorrect Bounding Boxes using pcap file with 3D Perception Stack of Autoware.Auto You might want to modify the param (.yaml) file for the Point Cloud Filter node as well. That file contains the static t |
| 2021-02-24 08:14:12 -0500 | marked best answer | Unable to use ros2 after installing using debian-packages I have installed ROS 2 (ros-dashing-desktop) via debian packages as per the following instructions: https://index.ros.org/doc/ros2/Instal... I am using Ubuntu 18.04. After installation, I source the ros-dashing workspace using the following command: When I try to run the ros 2 demo example using the following command: I get the following error: |
| 2021-02-24 07:45:52 -0500 | marked best answer | Autoware.AI and Autoware.Auto on Same Machine Hi, I currently have ADE docker installed on my Linux machine that is running Autoware.Auto. I now want to use Autoware.AI on the same machine. Is it okay to have both Autoware.Auto and Autoware.AI on the same Linux machine? If yes, do I need to install a separate docker container or I can install Autoware.AI inside the same docker that I used for Autoware.Auto? Machine Specifications: Linux Ubuntu 18.04 |
| 2021-02-24 02:45:57 -0500 | received badge | ● Notable Question (source) |
| 2021-02-24 02:45:57 -0500 | received badge | ● Popular Question (source) |
| 2021-02-24 01:42:55 -0500 | received badge | ● Popular Question (source) |
| 2021-02-24 01:42:39 -0500 | received badge | ● Teacher (source) |
| 2021-02-23 17:27:30 -0500 | answered a question | Incorrect Bounding Boxes using pcap file with 3D Perception Stack of Autoware.Auto I think the problem has something to do with the ray ground classifier node. This node is responsible for segregating th |
| 2021-02-23 17:27:30 -0500 | received badge | ● Rapid Responder (source) |
| 2021-02-23 17:12:45 -0500 | asked a question | Autoware.AI and Autoware.Auto on Same Machine Autoware.AI and Autoware.Auto on Same Machine Hi, I currently have ADE docker installed on my Linux machine that is run |
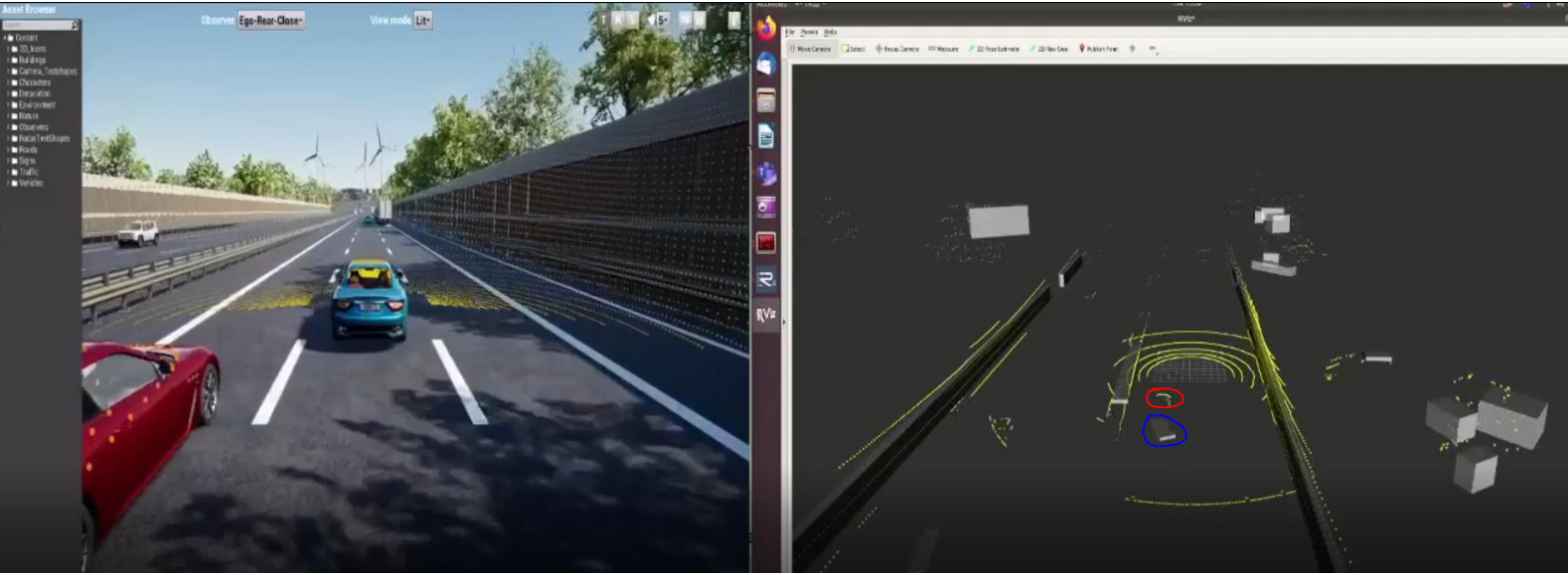
| 2021-02-23 08:49:25 -0500 | marked best answer | Bounding Box Error in 3D Perception Stack of Autoware.Auto Hi, I was trying to use the
In the picture above, the blue circle represents the bounding box and the red circle represents filtered point clouds. There are two issues that I am trying to resolve:
The Let me know why these issues are happening! Thanks, Shlok |
| 2021-02-22 05:36:01 -0500 | received badge | ● Notable Question (source) |
| 2021-02-19 11:38:34 -0500 | commented answer | Bounding Box Error in 3D Perception Stack of Autoware.Auto Hi Nikolai, Thanks for getting back to me. I am not sure if this is due to the computational load. My simulation envir |
| 2021-02-19 11:21:17 -0500 | commented answer | Bounding Box Error in 3D Perception Stack of Autoware.Auto Hi Nikolai, Thanks for getting back to me. I am not sure if this is due to the computational load. My simulation envir |
| 2021-02-19 11:13:26 -0500 | received badge | ● Popular Question (source) |
| 2021-02-19 11:03:16 -0500 | commented answer | Bounding Box Error in 3D Perception Stack of Autoware.Auto Hi Nikolai, Thanks for getting back to me. I am not sure if this is due to the computational load. My simulation envir |
| 2021-02-17 11:19:00 -0500 | edited question | Bounding Box Error in 3D Perception Stack of Autoware.Auto Bounding Box Error in 3D Perception Stack of Autoware.Auto Hi, I was trying to use the 3D Perception Stack in Autoware |
| 2021-02-17 11:17:50 -0500 | asked a question | Bounding Box Error in 3D Perception Stack of Autoware.Auto Bounding Box Error in 3D Perception Stack of Autoware.Auto Hi, I was trying to use the 3D Perception Stack in Autoware |
| 2021-02-10 13:15:04 -0500 | marked best answer | Running Trajectory Following Example from Autoware.Auto without LGSVL Hi, I am trying to execute/implement the trajectory following example as listed on the tutorial at Autoware.Auto website (https://autowarefoundation.gitlab.io/...) I have been following the autoware class 2020 provided by Apex.AI. I am able to run the tutorial for trajectory following using the LGSVL simulator, but I would like to modify the plant environment (LGSVL) and replace it with a different plant environment (that provides it the required sensor [lidar - front and rear] data . I have gone through the the ROS2 launch.py file that launches the ROS nodes in detail to understand how the nodes are initialized and how they work. If I do not start the simulation (LGSVL) and directly run the ROS2 launch command line to start the trajectory following examples, all ROS2 nodes are generated EXCEPT for the UNITYROS2 node. After further inspection, I found that this node publishes lidar data and subscribes to data from the vehicle etc. Is there any way that someone could provide me some help as to what needs to be changed (in the python launch file, .yaml configuration file etc. ) in order to run this example using a different simulation platform (plant environment). PS. I can publish ROS topics from my plant/simulation for the lidars with any name - just need to know what needs to change on the autoware.auto side. Thanks, Shlok |
| 2021-02-03 07:31:55 -0500 | received badge | ● Popular Question (source) |
| 2021-02-03 07:30:52 -0500 | commented question | Unable to Subscribe/Echo ros2 topic from outside autoware.auto @ bekirbostanci - I was able to solve this issue, it was indeed related to sourcing the ros2 environment. I just have to |
| 2021-02-03 07:28:25 -0500 | received badge | ● Notable Question (source) |
| 2021-02-02 13:29:19 -0500 | received badge | ● Popular Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.