The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-07-19 02:38:00 -0500 | edited question | rosbag::RecorderOptions and rosbag::Recoder specifying directory for bag files rosbag::RecorderOptions and rosbag::Recoder specifying directory for bag files Hi all, I have a problem about a class |
| 2023-07-19 02:35:58 -0500 | asked a question | rosbag::RecorderOptions and rosbag::Recoder specifying directory for bag files rosbag::RecorderOptions and rosbag::Recoder specifying directory for bag files Hi all, I have a problem about a class |
| 2023-03-21 09:23:37 -0500 | received badge | ● Self-Learner (source) |
| 2022-11-11 01:59:21 -0500 | received badge | ● Famous Question (source) |
| 2022-09-06 06:41:57 -0500 | received badge | ● Self-Learner (source) |
| 2022-09-06 06:40:35 -0500 | received badge | ● Famous Question (source) |
| 2022-08-24 02:49:29 -0500 | received badge | ● Notable Question (source) |
| 2022-08-18 12:48:10 -0500 | received badge | ● Popular Question (source) |
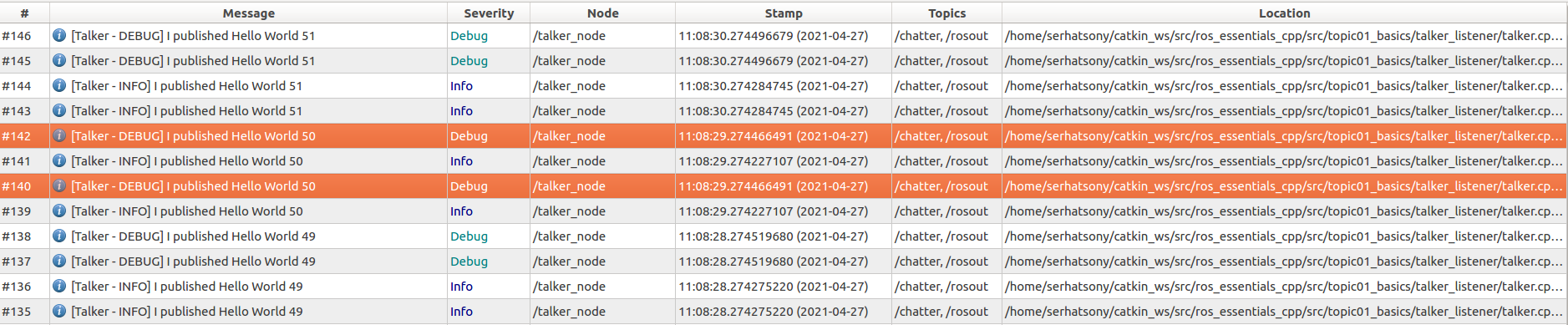
| 2022-08-17 13:35:10 -0500 | edited question | rqt_console shows the same message twice? rqt_console shows the same message twice? Hi all, I have a problem about the rqt_console specifically in the bag files. |
| 2022-08-17 13:34:56 -0500 | marked best answer | rqt_console shows the same message twice? Hi all, I have a problem about the rqt_console specifically in the bag files. When I open a bag file typing rosbag play test.bag, rqt_console starts showing the all messages streaming in the bag file. Btw, I want to see the DEBUG messages in the bag file. In order to do that, I changed the logger level of the talker_node before the time I started rosbag record -a. With this conditions, when I open the bag file, rqt_console shows the same message twice. And it's a bit annoying while debugging. I give the related code(talker_node) and rqt_console screen below for you to observe better. I see this problem only watching bag files. How can I solve this problem? Or where I make wrong? ROS1 Kinetic Ubuntu 16.04 Related Code: Picture of the problem:
|
| 2022-08-17 13:17:21 -0500 | commented question | ros::spinOnce and timeout Hi Mike, thanks for the comment. Let me try to make it more clear: void imu_Callback(std_msgs::Float64 input) //One of |
| 2022-08-17 09:25:43 -0500 | asked a question | ros::spinOnce and timeout ros::spinOnce and timeout Hello all, I have a problem about ros::spinOnce. My main algorithm's frequency is 25 Hz. So, |
| 2022-08-17 02:05:44 -0500 | received badge | ● Famous Question (source) |
| 2022-05-23 11:47:14 -0500 | received badge | ● Famous Question (source) |
| 2022-02-16 02:10:27 -0500 | commented answer | I can't add a library to my workspace. Can someone help me out, please? Hi @Shoukat.M, my solution is defined above actually, there is no addition step besides those I typed. Which particular |
| 2022-01-29 04:35:22 -0500 | received badge | ● Notable Question (source) |
| 2021-12-01 06:04:34 -0500 | marked best answer | Only available with -std=c++11 or -std=gnu++11 Hi everyone, I tried to use "range based for loop" and "lambdas" in my programs. Everything was fine in fact. My IDE didn't throw any error or warning at all. After "catkin_make", I see some warnings in my terminal which says: and same for "range based for loop" method. How can I handle this issue? What version of compiler do I use in my system? I typed some code in my program related to this issue: As an output, I gave C++98. Maybe this would be useful information I don't know. Probably related to this issue, I can't use "range based for loop" correctly if I run my program. (I can compile my program actually) It doesn't work like it should! Any relationship? How can I change my compiler version in my system. I want it to be C++11 especially. I'm kind of confused and new at this environment. Any help? UBUNTU 16.04 - Kinetic - Ros1. I use Visual Studio as IDE. Thank You! |
| 2021-11-10 01:25:50 -0500 | received badge | ● Notable Question (source) |
| 2021-11-10 01:22:00 -0500 | commented question | rqt_console shows the same message twice? Hi @Heho, I think the problem is related to rosmaster/roscore. When we make log files, all messages get recorded during |
| 2021-11-09 01:25:36 -0500 | received badge | ● Student (source) |
| 2021-10-15 01:18:52 -0500 | commented answer | Static Map corner at origin for Navigation Stack I had the same problem and solved the issue with this answer. Thank you! I did this change below in my move_base.launch( |
| 2021-10-13 14:00:55 -0500 | marked best answer | sensor_msgs/LaserScan.msg ==> range_max should be discarded Hi all, I have been dealing with slam_gmapping package and I have reached good results so far.(I created my map by the package) But I have a question about sensor_msgs/LaserScan.msg specifically. For describing my problem a lot faster, I want you to look at the picture below. In the picture, you can see my /scan topic and a view of Rviz. When you look at the /scan topic, I selected some of those ranges data where start off with the value of 65.53399. You can clearly see the relevant points in the Rviz screen too since they are far away from average measurements. As I pass such scan data into slam_gmapping package, the map is not created well. I believe that the value of 65.53399 in the /scan topic is used for failed scan data or something like that. I should not take these measurements account in the context of creating a map. But how? In the LaserScan.msg there is an explanation goes like that:
What I should understand of discarding data in the ranges std::vector? What value I should give for such failed/max data instead of leaving them as they are? Any idea or useful links? Thank you all in advance!
|
| 2021-10-13 14:00:55 -0500 | received badge | ● Scholar (source) |
| 2021-10-13 09:26:23 -0500 | commented answer | sensor_msgs/LaserScan.msg ==> range_max should be discarded Hi all, I did an amendment according to this documentation(REP-117: Informational Distance Measurements) in my program. |
| 2021-10-13 09:23:45 -0500 | commented answer | sensor_msgs/LaserScan.msg ==> range_max should be discarded Hi all, I did an amendment according to this documentation(link text) in my program. I added a if-statement like below. |
| 2021-10-12 07:53:36 -0500 | received badge | ● Popular Question (source) |
| 2021-10-12 06:16:08 -0500 | commented answer | sensor_msgs/LaserScan.msg ==> range_max should be discarded Hi gvdhoorn, thank you for your reply. I will work on the links you shared to improve my program. I appreciate. I use t |
| 2021-10-12 05:37:03 -0500 | received badge | ● Commentator |
| 2021-10-12 05:37:03 -0500 | commented answer | sensor_msgs/LaserScan.msg ==> range_max should be discarded Hi siddharthcb, thank you for your reply. I write the scan program by myself. I don't use any launch file or library. In |
| 2021-10-12 02:46:57 -0500 | asked a question | sensor_msgs/LaserScan.msg ==> range_max should be discarded sensor_msgs/LaserScan.msg ==> range_max should be discarded Hi all, I have been dealing with slam_gmapping package an |
| 2021-10-06 03:23:12 -0500 | received badge | ● Popular Question (source) |
| 2021-09-01 08:06:27 -0500 | received badge | ● Notable Question (source) |
| 2021-09-01 08:06:27 -0500 | received badge | ● Popular Question (source) |
| 2021-08-10 05:05:57 -0500 | marked best answer | Action Server Compiler Error => error: no match for call to ‘(boost::_mfi........ Hi all, I have a problem about creating an action_server on ROS1. I have created a few action server programs in the past. But never get this error which i will tell the details of. My action server program is very easy:( load_action_03.cpp ) Related action message is below:( load_service_04.action ) When I compile the programs, i get this error: |
| 2021-08-10 00:52:52 -0500 | answered a question | Action Server Compiler Error => error: no match for call to ‘(boost::_mfi........ Hello all, I found my problem. With the help of what the compiler says, I focused on this part: error: no match for cal |
| 2021-08-09 05:28:46 -0500 | received badge | ● Famous Question (source) |
| 2021-08-06 05:24:29 -0500 | asked a question | Action Server Compiler Error => error: no match for call to ‘(boost::_mfi........ Action Server Compiler Error => error: no match for call to ‘(boost::_mfi........ Hi all, I have a problem about cr |
| 2021-05-11 00:30:04 -0500 | received badge | ● Famous Question (source) |
| 2021-04-27 10:49:54 -0500 | marked best answer | compiler error while processing libcostmap_2d.so Hello, I have been working with navigation stack for a while without any problem but now, i am facing compiler error written below I guess, the problem is related to 'some update situtation'. I had executed these two commands: sudo apt-get update sudo apt-get upgrade any relationship? Or how can i solve this problem? Thank you! UBUNTU 16.04 - Kinetic (I have uploaded directly navigation stack with the branch of kinetic-devel ) |
| 2021-04-27 08:29:12 -0500 | edited question | compiler error while processing libcostmap_2d.so compiler error while processing libcostmap_2d.so Hello, I have been working with navigation stack for a while without an |
| 2021-04-27 08:27:56 -0500 | edited question | compiler error while processing libcostmap_2d.so compiler error while processing libcostmap_2d.so Hello, I have been working with navigation stack for a while without an |
| 2021-04-27 03:48:35 -0500 | edited question | rqt_console shows the same message twice? rqt_console shows the same message twice? Hi all, I have a problem about the rqt_console specifically in the bag files. |
| 2021-04-27 03:44:40 -0500 | asked a question | rqt_console shows the same message twice? rqt_console shows the same message twice? Hi all, I have a problem about the rqt_console specifically in the bag files. |
| 2021-03-27 00:26:24 -0500 | received badge | ● Notable Question (source) |
| 2021-03-24 19:42:49 -0500 | received badge | ● Famous Question (source) |
| 2021-03-15 21:11:13 -0500 | received badge | ● Famous Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.