The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-05-09 15:22:17 -0500 | received badge | ● Famous Question (source) |
| 2022-05-09 15:22:17 -0500 | received badge | ● Notable Question (source) |
| 2022-04-30 13:14:42 -0500 | received badge | ● Famous Question (source) |
| 2022-02-22 11:12:50 -0500 | received badge | ● Famous Question (source) |
| 2021-08-03 20:57:30 -0500 | commented answer | robot unable to rotate in place for dwa_local_planner especially for slow rotational velocities Thank you Samuel this helps a lot. |
| 2021-07-27 08:41:37 -0500 | received badge | ● Notable Question (source) |
| 2021-07-22 18:23:46 -0500 | received badge | ● Famous Question (source) |
| 2021-07-20 15:52:16 -0500 | received badge | ● Notable Question (source) |
| 2021-06-29 04:23:56 -0500 | commented question | rosrun turtlesim turtlesim_node error while loading shared libraries Hi Simone, just to clarify you are running Ubuntu OS 20.04 on a virtualizer such as Oracle VM VirtualBox or vmware works |
| 2021-06-29 04:22:50 -0500 | commented question | rosrun turtlesim turtlesim_node error while loading shared libraries Hi Simone, just to clarify you are running Ubuntu OS 20.04 on a virtualizer such as Oracle VM VirtualBox or vmware works |
| 2021-06-24 20:12:09 -0500 | received badge | ● Notable Question (source) |
| 2021-06-03 10:35:31 -0500 | received badge | ● Popular Question (source) |
| 2021-06-01 13:51:01 -0500 | received badge | ● Great Question (source) |
| 2021-06-01 13:48:31 -0500 | received badge | ● Famous Question (source) |
| 2021-05-27 23:32:02 -0500 | answered a question | ROS 1 on Ubuntu server 18.04. I am running Ubuntu 20.04 server on RPI4 with ros 1 noetic without any problem. |
| 2021-05-27 23:32:02 -0500 | received badge | ● Rapid Responder (source) |
| 2021-05-17 02:27:39 -0500 | commented question | robot unable to rotate in place for dwa_local_planner especially for slow rotational velocities H Clemens, did you find any solution for this issue ? |
| 2021-05-17 02:21:06 -0500 | commented question | robot unable to turn in place using dwa_local_planner Hi Naman did you find any solution for this issue ? |
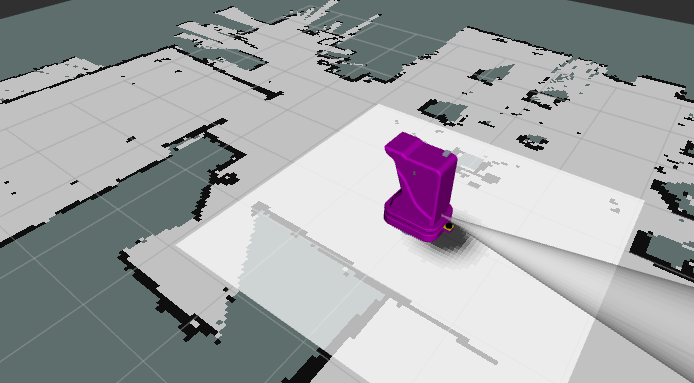
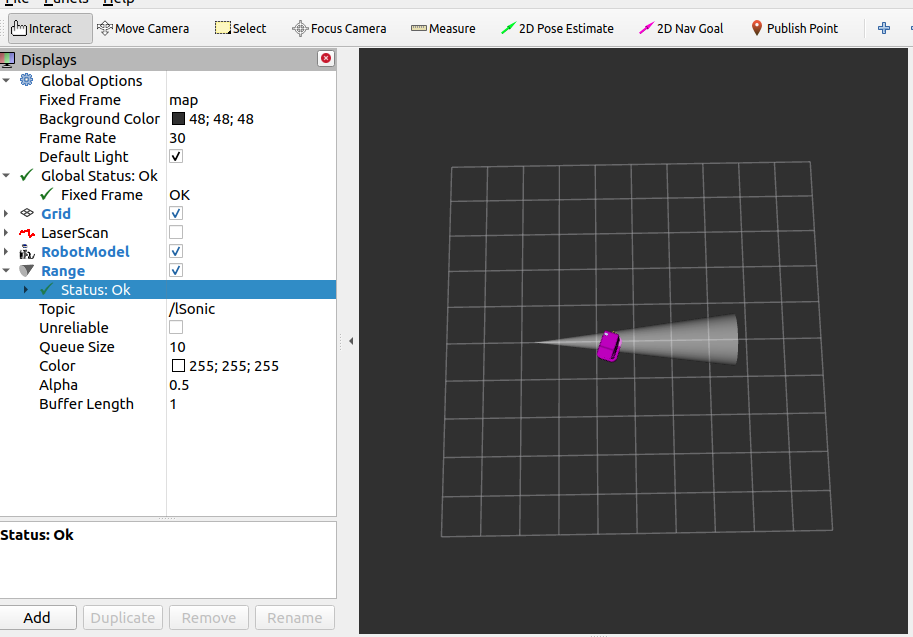
| 2021-05-10 05:54:12 -0500 | marked best answer | Ultrasonic sensor with range_sensor_layer forming obstacle behind sensor line in RVIZ Hi, I'm trying to integrate an ultrasonic sensor to the costmap using range_sensor_layer, I am able to form and marking the obstacle in the costmap. I have enabled clear_on_max_reading to TRUE, thus any obstacle will be cleared on max reading without any issue. Ultrasonic model : Grove- Ultrasonic Ranger Now, there is one problem with my setup: 1. If the obstacle become too close to the sensor, the marking (orb/arc) formed right in front of sensor (goes behind it too) and within robot footprint's body, and removing the obstacle does not clear the marking. this cause the robot wont move due to unclear path. Below: Costmap with range_sensor_layer plugin active, I move the object until it become too close to the sensor and remove the object, the obstacle marking still there (the rest of the obstacle marking successfully removed):
That abnormal orb does not cause any issue to mark new obstacles, and this new obstacles can be remove without problem. Below is portion of parameter for ultrasonic sensor. costmap_common_params.yaml: Is there some important parameter that I overlook or miss? I have tried to increase the min_range in my ultrasonic.py to 0.1, this will clip any value in between 0 to 0.1 hence solve the problem, but this will add '0.1' blind spot in front of robot (ultrasonic attached infront) itself. Which I would like to explore the possibilities to use min_range = 0.0 without causing any leftover marking when cleared. |
| 2021-05-10 05:53:56 -0500 | received badge | ● Popular Question (source) |
| 2021-05-04 01:51:37 -0500 | asked a question | Ultrasonic sensor with range_sensor_layer forming obstacle behind sensor line in RVIZ Ultrasonic sensor with range_sensor_layer forming obstacle behind sensor line in RVIZ Hi, I'm trying to integrate an ul |
| 2021-04-26 21:31:12 -0500 | commented question | saving automatically a final map using map_saver Hi There, Did you find any solution to this ? |
| 2021-04-25 22:27:05 -0500 | asked a question | Saving the Map explore_lite Saving the Map explore_lite Hi guys I am currently using ros noetic and explore_lite package for doing the auto mapping |
| 2021-04-25 22:27:05 -0500 | asked a question | Saving the Map explore_lite Saving the Map explore_lite Hi guys I am currently using ros noetic and explore_lite package for doing the auto mapping |
| 2021-04-25 22:18:09 -0500 | edited question | Auto Mapping on ROS Noetic Auto Mapping on ROS Noetic Hi guys, Currently I am using ROS Noetic and Ubuntu 20.04 with gmapping and I can manually m |
| 2021-04-20 21:37:09 -0500 | received badge | ● Popular Question (source) |
| 2021-04-18 23:02:43 -0500 | edited question | Auto Mapping on ROS Noetic Auto Mapping on ROS Noetic Hi guys, Currently I am using ROS Noetic and Ubuntu 20.04 with gmapping and I can manually m |
| 2021-04-18 22:58:49 -0500 | asked a question | Auto Mapping on ROS Noetic Auto Mapping on ROS Noetic Hi guys, Currently I am using ROS Noetic and Ubuntu 20.04 with gmapping and I can manually m |
| 2021-03-11 22:11:38 -0500 | commented question | Build ROS neotic on ubuntu 18.04 (nvidia jetson) Actually I dont have a solution to this yet I am just commenting to bring up this question. since i also have same probl |
| 2021-03-11 22:11:38 -0500 | received badge | ● Commentator |
| 2021-03-10 19:49:26 -0500 | commented question | How can urdf joints subscribe from a topic? Use same name for your published topic and the URDF for example if you are publishing on /right_wheel make sure you hav |
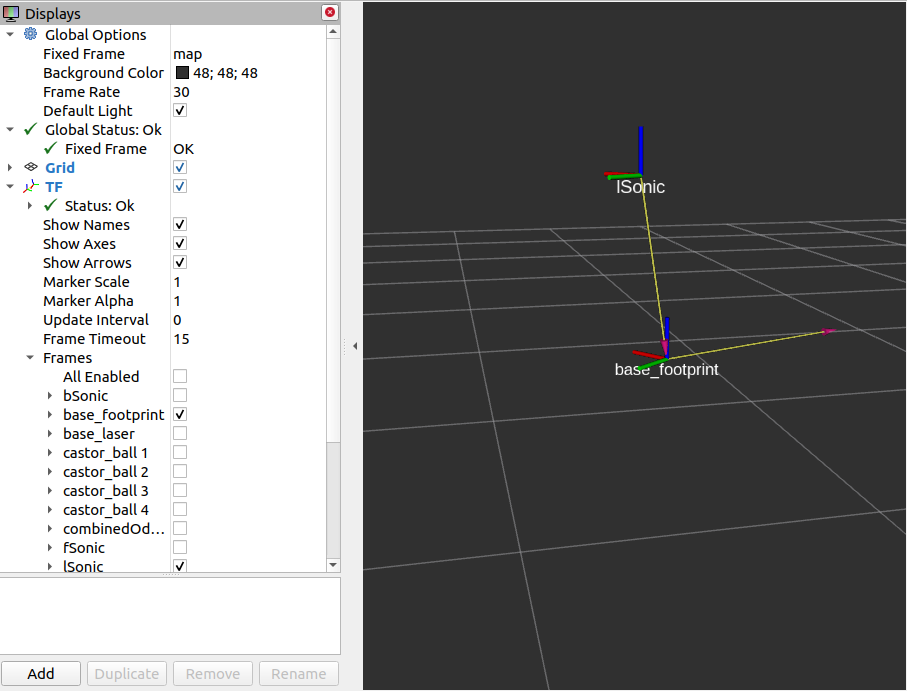
| 2021-03-10 02:50:26 -0500 | marked best answer | ultrasonic sensor does not match with URDF Hi guys, I have a real robot with 4 diffrent ultrasonic sensors publishing on 4 different topics. I used the same name in my URDF file as publishers however when i want to display it on RVIZ the location is wrong. is there any guidline that i can refer to ? or anyone has idea what i am doing wrong ?
This is the topic echo This is the topic info This is ultrasonic publisher code |
| 2021-03-10 02:50:26 -0500 | received badge | ● Scholar (source) |
| 2021-03-10 02:50:18 -0500 | answered a question | ultrasonic sensor does not match with URDF I found the soultion, the problem was in this line frame_id: "/base_footprint" I had to remove the "/" and now everyt |
| 2021-03-10 02:50:18 -0500 | received badge | ● Rapid Responder (source) |
| 2021-03-10 00:06:50 -0500 | commented question | ultrasonic sensor does not match with URDF Thank you for your answer, I already modify the code accordingly now it become better however the location is still wron |
| 2021-03-10 00:04:53 -0500 | edited question | ultrasonic sensor does not match with URDF ultrasonic sensor does not match with URDF Hi guys, I have a real robot with 4 diffrent ultrasonic sensors publishing o |
| 2021-03-09 15:33:42 -0500 | received badge | ● Popular Question (source) |
| 2021-03-09 05:07:30 -0500 | received badge | ● Notable Question (source) |
| 2021-03-09 03:57:13 -0500 | commented question | ultrasonic sensor does not match with URDF @gvdhoom I converted t he values to meter and now i can not see anything on RVIZ |
| 2021-03-09 03:55:06 -0500 | edited question | ultrasonic sensor does not match with URDF ultrasonic sensor does not match with URDF Hi guys, I have a real robot with 4 diffrent ultrasonic sensors publishing o |
| 2021-03-09 03:55:06 -0500 | received badge | ● Editor (source) |
| 2021-03-09 03:55:04 -0500 | edited question | ultrasonic sensor does not match with URDF ultrasonic sensor does not match with URDF Hi guys, I have a real robot with 4 diffrent ultrasonic sensors publishing o |
| 2021-03-09 02:17:07 -0500 | asked a question | ultrasonic sensor does not match with URDF ultrasonic sensor does not match with URDF Hi guys, I have a real robot with 4 diffrent ultrasonic sensors publishing o |
| 2021-02-08 15:36:01 -0500 | marked best answer | Unable to change the Lidar Scan data color in rviz Hi guys, I am running Ros noetic on a RP4 and ubuntu 20 and connect to it using another ubuntu running in VM. I can see the reading from lidar in VM rviz however the color is white when i run the rviz on the RP4 directly the color is red I also can change the color to something else however on the VM no matter what i do I am unable to do that. any idea what could be the issue and how to solve it ? Thank you |
| 2021-02-07 19:39:10 -0500 | received badge | ● Popular Question (source) |
| 2021-02-04 12:49:24 -0500 | commented question | ekf_localization_node publishes /odom->husky_1/base_link transform instead of husky_1/odom->/husky_1/base_link transform I am not sure if I understrand your problem however are you trying to remap it ? if yes you can use the following code i |
| 2021-02-03 04:26:47 -0500 | commented question | find_package() on ROS_PACKAGE_PATH? @gvdhoorn I am just suggesting those ways in case if OP not aware of it which could enable him to do the catkin_make and |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.