
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-05-22 17:33:33 -0500 | received badge | ● Nice Answer (source) |
| 2022-01-29 05:35:29 -0500 | received badge | ● Good Question (source) |
| 2019-12-23 22:06:35 -0500 | received badge | ● Nice Question (source) |
| 2018-09-19 04:27:39 -0500 | marked best answer | catkin_make error Hello I am trying to build a package 'gruvy_usarsim_inf' by using catkin workspace. I have set the dependencies also; but when I type in the terminal "catkin_make" following error comes. root@ubuntu:~/catkin_ws# catkin_make Base path: /root/catkin_ws Source space: /root/catkin_ws/src Build space: /root/catkin_ws/build Devel space: /root/catkin_ws/devel Install space: /root/catkin_ws/install #### Running command: "make cmake_check_build_system" in "/root/catkin_ws/build"#### -- Using CATKIN_DEVEL_PREFIX: /root/catkin_ws/devel -- Using CMAKE_PREFIX_PATH: /opt/ros/groovy -- This workspace overlays: /opt/ros/groovy -- Using Debian Python package layout -- Using CATKIN_ENABLE_TESTING: ON -- Call enable_testing() -- Using CATKIN_TEST_RESULTS_DIR: /root/catkin_ws/build/test_results -- Found gtest: gtests will be built -- catkin 0.5.71 -- BUILD_SHARED_LIBS is on -- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ -- ~~ traversing 1 packages in topological order: -- ~~ - gruvy_usarsim_inf -- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ -- +++ processing catkin package: 'gruvy_usarsim_inf' -- ==> add_subdirectory(gruvy_usarsim_inf) CMake Error at /opt/ros/groovy/share/catkin/cmake/catkinConfig.cmake:72 (find_package): Could not find a configuration file for package control_msgs. Set control_msgs_DIR to the directory containing a CMake configuration file for control_msgs. The file will have one of the following names: Call Stack (most recent call first): gruvy_usarsim_inf/CMakeLists.txt:7 (find_package) CMake Error at /opt/ros/groovy/share/catkin/cmake/catkinConfig.cmake:72 (find_package): Could not find a configuration file for package nav_msgs. Set nav_msgs_DIR to the directory containing a CMake configuration file for nav_msgs. The file will have one of the following names: Call Stack (most recent call first): gruvy_usarsim_inf/CMakeLists.txt:7 (find_package) CMake Error at /opt/ros/groovy/share/catkin/cmake/catkinConfig.cmake:72 (find_package): Could not find a configuration file for package sensor_msgs. Set sensor_msgs_DIR to the directory containing a CMake configuration file for sensor_msgs. The file will have one of the following names: Call Stack (most recent call first): gruvy_usarsim_inf/CMakeLists.txt:7 (find_package) CMake Error at /opt/ros/groovy/share/catkin/cmake/catkinConfig.cmake:72 (find_package): Could not find a configuration file for package tf. Set tf_DIR to the directory containing a CMake configuration file for tf. The file will have one of the following names: Call Stack (most recent call first): gruvy_usarsim_inf/CMakeLists.txt:7 (find_package) -- Configuring incomplete, errors occurred! make: * [cmake_check_build_system] Error 1 Invoking "make cmake_check_build_system" failed |
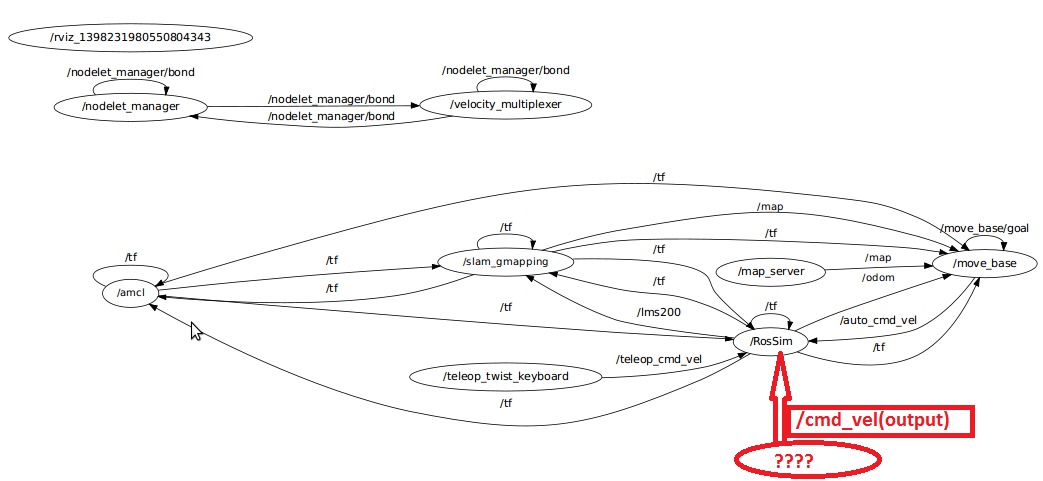
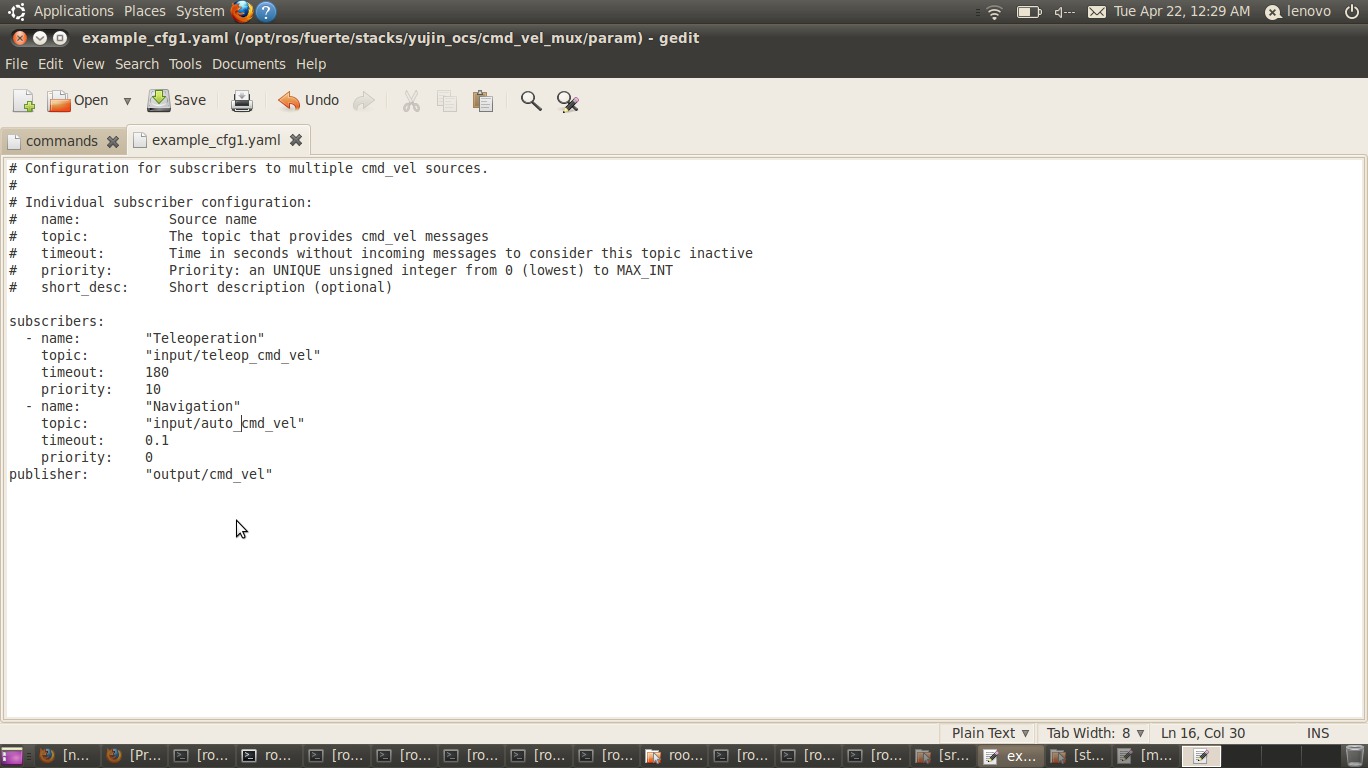
| 2017-04-20 17:38:02 -0500 | marked best answer | Proper Working of cmd_vel_mux for Velocity Multiplexing Hello, I am using ROS fuerte version and the simulator is USARSim. ::AIM:: Now, I try to use the velocity multiplexer (sudo apt-get install ros-fuerte-yujin-ocs) designed by YujinRobot(http://wiki.ros.org/cmd_vel_mux) for multiplexing between teleoperation and autonomous navigation. I use rviz for setting the goal for autonomous navigation. ::ACTION TAKEN:: I have used following command to bring nodelet_manager and velocity_multiplexer: roslaunch cmd_vel_mux standalone.launch and following is the example_cfg.yaml subscribers: • name: "Teleoperation" topic: "teleop_cmd_vel" timeout: 180 priority: 10 • name: "Navigation" topic: "cmd_vel" timeout: 0.1 priority: 0 TASK 1 I want to give more priority to teleoperation. Before declaring the /teleop_cmd_vel to be inactive topic for multiplexing, I want the timeout period to be more. TASK 2 I don't want the autonomous navigator of ROS snatch away the driving control. But, I am not getting the proper behavior that I am expecting. The autonomous controller snatch away the control before the 180 second (even if both topics are active) from teleoperation. Question:What may be the reason that the robot is not following exactly the example_cfg.yaml? If it goes like this then adding dynamic reconfigure server will not be fruitful for my experiment. ALL The Nodes Launched Properly. RESULT 1.TOPICS DON"T FOLLOW PRIORITY CONFIG FILE?
PLZ REPLY :-)
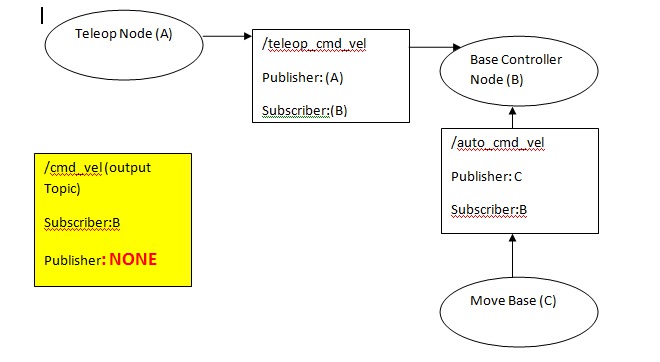
Who will be the publisher of output topic /cmd_vel As the velocity multiplexer don't publish to /cmd_vel (output topic of config file), should I modify the code? RAW Config File Config File.jpg Modified Config File M_Config.jpg |
| 2017-04-20 16:25:58 -0500 | marked best answer | How to improve odometry? Hi, I am going through the http://wiki.ros.org/navigation/Troubleshooting; which is related to proper navigation stack set up?
Thanks a lot. |
| 2016-10-11 07:51:39 -0500 | marked best answer | USARSim and ROS integration I have my own map and robot placed in the Map through USARSim. Since I have installed USARSim in Windows7 and ROS runs on Linux. So; what should I do--1)install ROS and USARSim both in Linux or 2)On windows7 use virtualbox to install Linux and then on Linux install ROS? Question 2: Which version of ROS should be installed? Groovy or hydro? Question 3: Gazebo or Usarsim which one is best to work with ROS? Has anyone correctly use this framework upto high level navigation? I am stuck at creation of 2D global map. |
| 2016-09-25 13:17:35 -0500 | received badge | ● Famous Question (source) |
| 2016-08-14 01:46:31 -0500 | marked best answer | Figuring out the power of a YAML file. I have no prior experience in writing a YAML file. I want to know something related to it's capability.
START END Scenario:1 Suppose,* I don't want explicit number in the priority field i.e 7/4* instead I need to load this value from a text file. So, I want priority to be a variable. Scenario 2 Let's hope that above scenario is possible. Now suddenly the text file changes; which in turn changes the yaml file as well. Will ROS is able to catch the dynamic behavior of the yaml file and reflect the same? Can you just tell me how to achieve above situations and any good reference for writing YAML files? Thanks in advances for your valuable suggestions... |
| 2016-08-08 01:35:29 -0500 | marked best answer | Installation Problem of ROS groovy on Ubuntu 11.10 Hello I am trying to install ROS groovy on ubuntu 11.10 by following the instruction given http://wiki.ros.org/groovy/Installation/Ubuntu. When I type in the terminal sudo apt-get install ros-groovy-desktop-full; then after 16% completion, suddenly following errors come. And after that rosdep command does not work(command not found). Err http://packages.ros.org/ros/ubuntu/ oneiric/main ros-groovy-visualization-tutorials i386 0.7.6-s1374888763~oneiric |
| 2016-08-08 00:38:48 -0500 | marked best answer | Without using slam gmapping!! Hello, I just want to know whether we can give our predefined map of an office room without using slam gmapping? I want to use laser and camera in the robot, and with the help of both obstacles of the given map can be avoided? Will it be a problem if I want to write my own navigation stack with my own map? I am using USARSim simulator on windows& and ROS Groovy on Ubuntu11.10. |
| 2016-08-08 00:36:09 -0500 | marked best answer | Groovy vs Fuerte Question 1:What modification we should make(in Groovy) to run/install a package in Groovy which correctly run/installed in Fuerte? I have found out one that is in Groovy we have 'package.xml' where as in Fuerte it is * 'manifest.xml'* Question 2 What is the advantage of catkin over rosbuild? |
| 2016-08-08 00:21:37 -0500 | marked best answer | Modelling of own Package dependencies in ROS environment Hi! suppose I have a method in path_planning package (my own package) and its output must be made available to a method that reside in another package called "Navigation package" (my own package). How to correctly model this scenario in ROS environment using nodes, topics etc. |
| 2016-08-08 00:19:24 -0500 | marked best answer | usarsim.launch file Is there any error? launch param name="usarsim/robotType" value="P3AT" param name="usarsim/hostname" value="localhost" param name="usarsim/port" value="3000" param name="usarsim/startPosition" value="Vehicle1" param name="usarsim/odomSensor" value="InsTest" node name="RosSim" pkg="usarsim_inf" type="usarsim_node" launch I have intentionally left <> brackets here. Otherwise lines are not visible in the question. |
| 2016-05-09 21:02:58 -0500 | marked best answer | How cost_maps and global/local planner works? Hi, I have gone through http://wiki.ros.org/move_base; but some doubt comes to my mind.
4) What the internal navigation messages (flown from global planner to local planner) contains? Thanks for your time.. |
| 2016-05-09 21:02:55 -0500 | marked best answer | How odometry is going to help the navigation stack? Hi, Although I am going through the tutorials, I need some precise answer.
Thanks for your time |
| 2016-05-09 21:02:13 -0500 | marked best answer | Accuracy of Autonomous navigation using navigation stack in ROS Hi, For a complex maze environment or unstructured indoor environment (without any inclined floor); is there any possibility that the localization and obstacle detection mechanism of ROS fails while moving a robot autonomously using High Level Navigation? Thanks in advance |
| 2016-05-09 20:49:13 -0500 | marked best answer | what is the simplest method of extracting a 2D map file from the scenario? I am working on USARSim/ROS control framework. I have been able to move robot using keyboard through ROS package. Now I want to generate a global map in 2D of the USARSim environment where the robot is moving. What is the prerequisite for map_saver utility to generate a 2D map? Can anyone please help me regarding this. |
| 2016-05-09 03:20:40 -0500 | received badge | ● Notable Question (source) |
| 2016-05-09 03:20:40 -0500 | received badge | ● Famous Question (source) |
| 2016-05-08 15:38:44 -0500 | marked best answer | Completion time of autonomous navigator of ROS.
Thanks in advance. |
| 2015-11-02 01:49:31 -0500 | marked best answer | Error while loading nodelet [/velocity_multiplexer] Hi, I am using ROS fuerte version on Ubuntu 10.04. I use the velocity multiplexer (sudo apt-get install ros-fuerte-yujin-ocs) designed by YujinRobot(http://wiki.ros.org/cmd_vel_mux). I modify the one header file and one cpp file in the installed package, to incorporate one more subsrciber (so that nodelet manager subcribes to amcl_pose topic). I compile the code and it gets compiled perfectly. root@ubuntu:/opt/ros/fuerte/stacks/yujin_ocs/cmd_vel_mux# make But when I RUN following command: roslaunch cmd_vel_mux standalone.launch The errors can be found below:: Some files that you may be interested are given below::::: CMakeList.txthttp://pastebin.com/FfJaZF7v nodelet_plugins.xmlhttp://pastebin.com/S1ZxgW9M header filehttp://pastebin.com/PcuNaWYm Source cpp filehttp://pastebin.com/gZUfqEu3 manifest.xmlhttp://pastebin.com/vS0w7Tiq Question1:: why the error says "Make sure that you are calling the PLUGINLIB_REGISTER_CLASS macro in the library code, and that names are consistent between this macro and your XML."??? Question2:: why new function APPEARS to be UNDEFINED?? Even if it is included in Header File and there is no problem in compiling the new package. Please HELP NOTE In CMakeLists.txt ( http://pastebin.com/zCzZ7fG6 ), even if we link directories explicitly, still '.so' file can't figure it out where the cpp or header file |
| 2015-11-02 01:43:23 -0500 | marked best answer | How to automate the launching procedure of ROS nodes Hi, I am interested in automating the commands that I have to type in separate new terminals to launch various nodes. step:1.sudo su step:2.cd /root/fuerte_workspace step:3.source /root/fuerte_workspace/setup.sh Above three steps need to be repeated every time when I launch new terminals(ctrl+alt+t). with following commands to launch command4, I need to go to /opt/ros/fuerte/stacks/yujin_cmd_vel_mux Procedure One: Procedure Two: Through include tag in one launch file. But I don't know how to incorporate rosrun commands inside a launch file. |
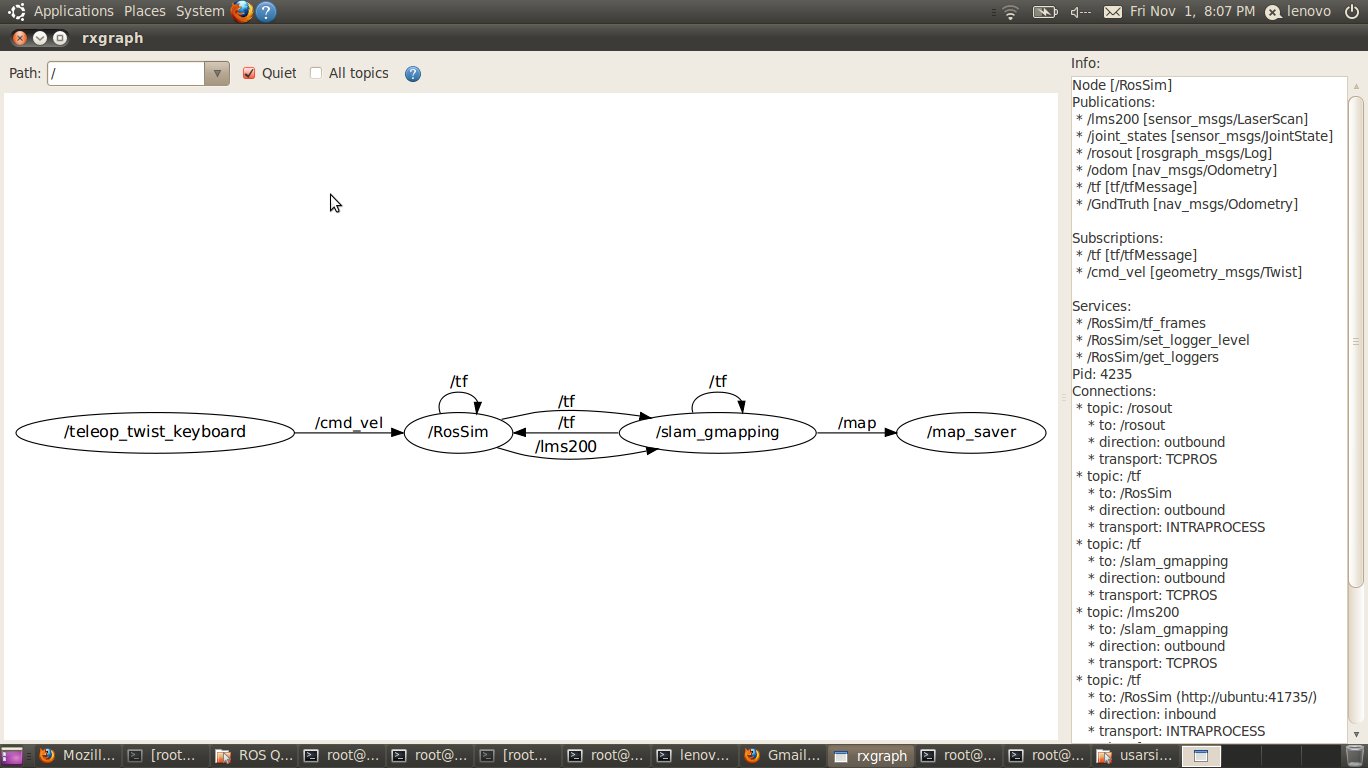
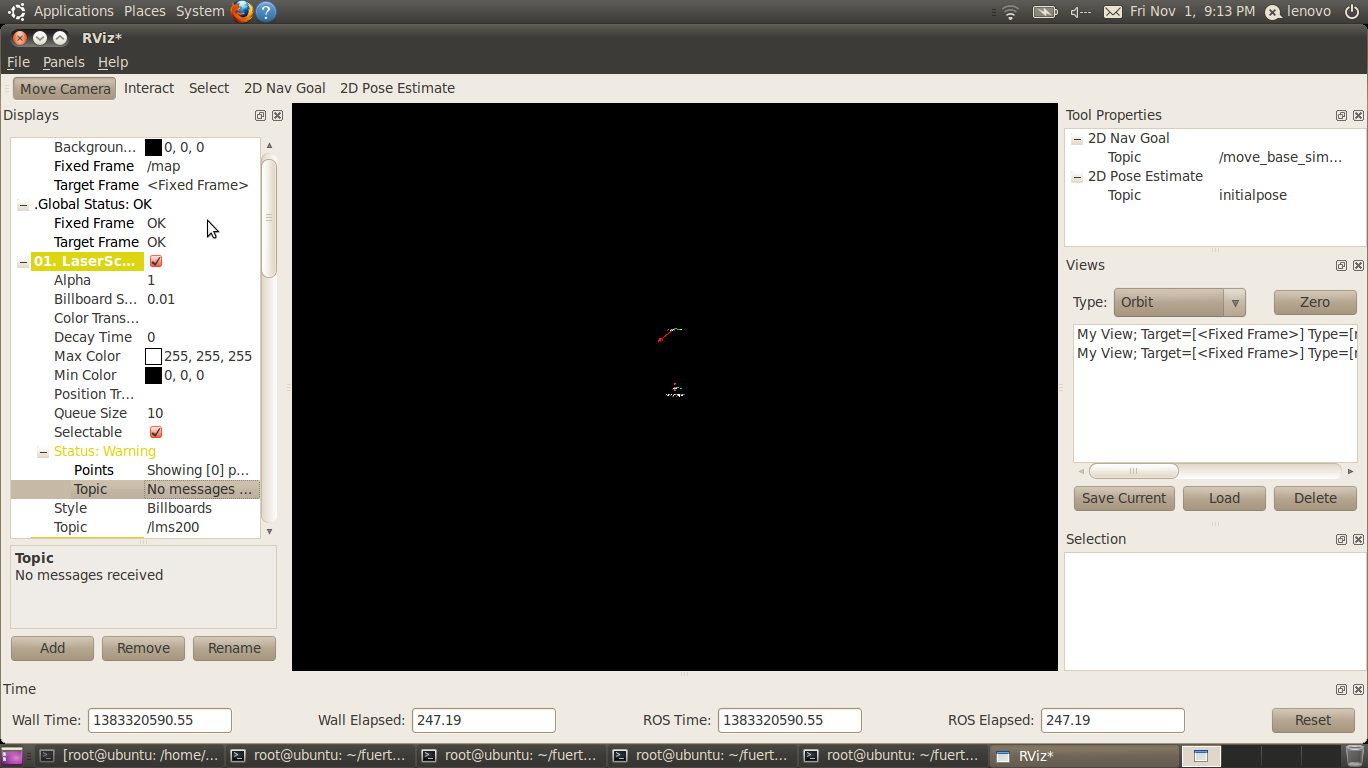
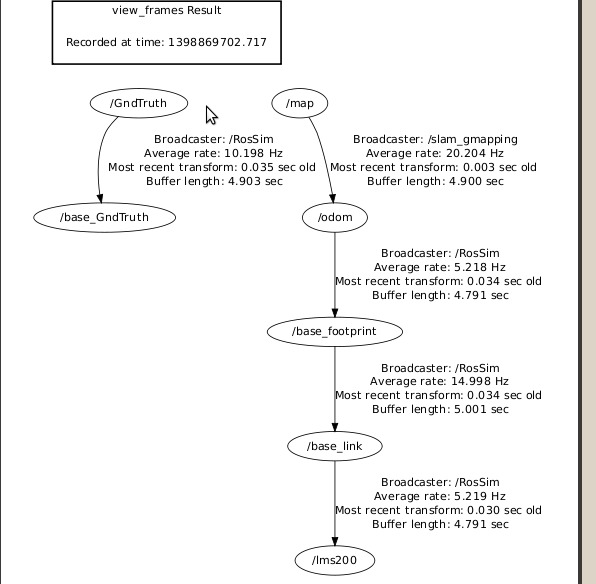
| 2015-09-11 15:20:32 -0500 | marked best answer | Suspected bug in USARSim/ROS Hi, After several attempts I have been able to generate a bag file containing logged transform and laser scan data. when I type root@ubuntu:~/fuerte_workspace/sandbox# rosbag info mylaserdata.bag path: mylaserdata.bag version: 2.0 duration: 7:28s (448s) start: Oct 31 2013 21:20:39.34 (1383234639.34) end: Oct 31 2013 21:28:07.46 (1383235087.46) size: 3.7 MB messages: 24650 compression: none [5/5 chunks] types: tf/tfMessage [94810edda583a504dfda3829e70d7eec] topics: /tf 24650 msgs : tf/tfMessage (2 connections) But a standard bag from willow garage contains types: sensor_msgs/LaserScan [90c7ef2dc6895d81024acba2ac42f369] tf/tfMessage [94810edda583a504dfda3829e70d7eec] topics: /base_scan 924 msgs : sensor_msgs/LaserScan I started gmapping by rosrun gmapping slam_gmapping scan:=lms200 _odom_frame:=odom so there is no information regarding /lms200. rxgraph output gives no information of the error but rviz information does not match with auto generated transform tree. There is no messeges in /lms200 and we have to manually add /lms200 through rviz window Again rostopic echo /lms200 to see if there are any published messages Then nothing appears. PLZ help. * I know this USARSim/Ros is used in robo cup as well but no one mentioned about the error.* |
| 2015-07-14 16:03:01 -0500 | marked best answer | How to process geometry messages of type PoseWithCovarianceStamped and PoseStampe Hi, I am using ROS fuerte version on Ubuntu 10.04. I have a screen shot below (WHOLE TOPIC.jpg) which tells about what type of messages are published on topics amcl_pose and move_base_simple/goal : Messages of amcl_pose are passed to a callback function,called currentPosCallback Messages of move_base_simple/goal are passed to a callback function,called goalPosCallback Question 1:I want to calculate angle between current goal(from move_base_simple/goal topic) and robot position (amcl_pose). In trigonometry, we can calculate angle between two points P1(x1,y1) and P2(x2,y2). Is there any way to do this type of thing here? I want to store this angle in class member data, what is the guarantee that it is the most updated one? How to do that? Thanks for any kind of help................ |
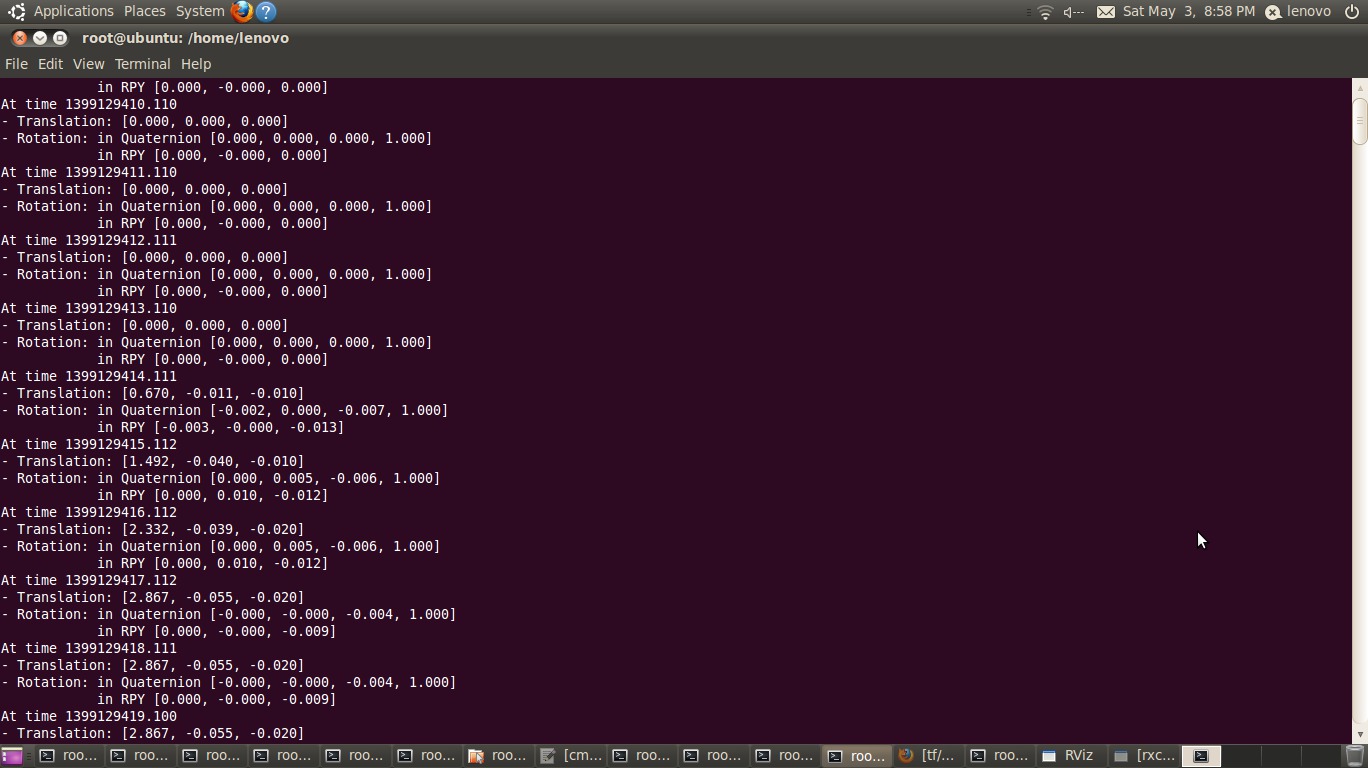
| 2015-05-20 10:31:52 -0500 | marked best answer | rosrun tf tf_echo /map /base_link VS. Coding implementation. Hi, I want to calculate robot's current position with respect to the map. Following is my "rosrun tf view_frames" I have tried following commands which gives robot position with respect to /map frame. rosrun tf tf_echo /map /base_link Output is here:map to base_link.jpg Now same thing, I tried to perform using the code here But the output of rxconsole is shown below:: transform.jpg. I am just wondering why the results of the code and that of "rosrun tf tf_echo /map /base_link" is not matching? I am getting "Got a transform! x = 0.000000, y =0.000000", even after 1sec when I use the code. But "rosrun tf tf_echo /map /base_link", gives actual robot position with respect to the map as you can see the screen shot. Question1: Is there any way to get the exact position of the robot while moving in the environment? Question 2: I don’t know how the above command gives position of the robot with respect to the map, but the implementation of the SAME COMMAND gives some INVALID result? Question 3: Is there any way to emulate the command "rosrun tf tf_echo /map /base_link" in coding? Please help.......... Many Thanks. |
| 2015-05-07 11:13:16 -0500 | commented question | How to save the poses which on the global_path topic into a txt file? Hi, I don't know the answer.. |
| 2015-05-02 00:52:52 -0500 | commented question | questions about dijkstra algorithm used in navfn package to path planning @jxl, Hi..Sorry to reply late!! No problem, we can discuss ideas about ROS. |
| 2015-04-13 04:01:46 -0500 | received badge | ● Famous Question (source) |
| 2015-04-01 01:36:21 -0500 | received badge | ● Nice Question (source) |
| 2015-03-25 12:36:32 -0500 | received badge | ● Famous Question (source) |
| 2015-02-12 08:31:45 -0500 | commented question | Unable to use move_base trajectory planner sending goal by code Have you published your plan correctly? |
| 2015-02-07 08:01:10 -0500 | received badge | ● Famous Question (source) |
| 2015-02-04 23:44:16 -0500 | commented answer | Dijkstra Global Path Planner Is there any material related to complete understanding of navfn package? Thanks!! |
| 2015-02-03 22:04:19 -0500 | received badge | ● Critic (source) |
| 2015-02-03 08:20:45 -0500 | received badge | ● Notable Question (source) |
| 2015-01-30 19:49:04 -0500 | received badge | ● Self-Learner (source) |
| 2015-01-30 19:49:04 -0500 | received badge | ● Teacher (source) |
| 2015-01-27 12:34:37 -0500 | commented answer | Issues related to navfn and global_planner plugin Sorry for not explaining my doubt @David. I have updated the question to incorporate the doubt. |
| 2015-01-27 12:30:12 -0500 | edited question | Issues related to navfn and global_planner plugin Hi, I am using ROS fuerte. I have gone through the navfn . I want a ROS plugin for my own global planner I have Visited this page. I have following doubts:
Updated based on Comment As mentioned in the link, pluginlib is a C++ library for loading and unloading plugins from within a ROS package. Plugins are dynamically loadable classes that are loaded from a runtime library. So, in the tutorial, a static makePlan() method is used. I observe that the Dijkstra's algorithm has to be modified and it is defined as calcNavFnDijkstra(true). Again, calcNavFnDijkstra(true) is defined inside navfn.cpp. So, I want to know, if I write my own navfn.cpp which is the only source file in my plugin, can the other part of navfn_ros.cpp (defined inside navfn package) can relate to the new navfn.cpp dynamically?I hope somebody has enough insight into the code to help me with these doubts. Thanks in advance |
| 2015-01-27 05:35:41 -0500 | commented answer | Issues related to navfn and global_planner plugin I have a doubt related to your last answer. In tutorial, only global_planner.cpp is used specific to plugin. global_planner.cpp is similar to navfn_ros.cpp. calcNavFnDijkstra(true) is used inside makePlan() method and computePotential() uses calcNavFnDijkstra(). calcNavFnDijkstra(true) is 2b changed |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}