The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-01-22 02:54:07 -0500 | received badge | ● Famous Question (source) |
| 2022-08-17 03:59:25 -0500 | commented answer | Obstacles in camera blind spot are cleared from local costmap Glad to hear that you found a solution that works for you! And thanks for posting it, I'm sure it will be useful for oth |
| 2022-08-16 10:38:26 -0500 | commented answer | Obstacles in camera blind spot are cleared from local costmap Hi! We have been struggling with similar problems when working with these Intel cameras. In the specs, the minimum dista |
| 2022-04-13 08:00:56 -0500 | received badge | ● Notable Question (source) |
| 2022-03-06 21:25:16 -0500 | received badge | ● Popular Question (source) |
| 2022-02-09 14:03:01 -0500 | answered a question | Laser_geometry ROS2 Eloquent python I faced the same problem in ROS2 Foxy. Got it working by installing the package from source using ros2-branch: https://g |
| 2022-01-14 02:42:27 -0500 | answered a question | Why won't my node exit Destroying the node won't exit rclpy.spin() loop. One way to implement this is by checking your node's self.running stat |
| 2022-01-14 02:42:27 -0500 | received badge | ● Rapid Responder (source) |
| 2021-11-08 09:55:36 -0500 | commented question | Slam Toolbox marks humans to map Thanks for the great resources! The first link seems to do the dynamic point removal from rgb-d image and the second use |
| 2021-11-05 04:57:01 -0500 | asked a question | Slam Toolbox marks humans to map Slam Toolbox marks humans to map While mapping large areas with our robot, we have a human operator walking with the rob |
| 2021-09-28 04:42:05 -0500 | commented question | ROS Navigate through slope Hi @Gerry! Did you find any solution for this? I'm currently facing the same problem and I'm looking for a mapping and n |
| 2021-09-22 06:39:29 -0500 | answered a question | cant visualize gpu ray in rviz Looks like your plugin is publishing laser data to wrong frame. This would explain why rviz cannot visualize your laser |
| 2021-08-02 07:35:35 -0500 | received badge | ● Famous Question (source) |
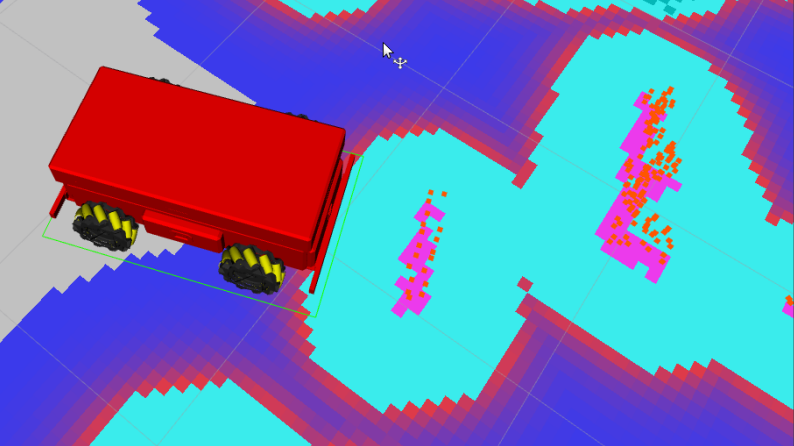
| 2021-04-09 14:06:12 -0500 | marked best answer | Obstacles in camera blind spot are cleared from local costmap I'm trying to implement obstacle avoidance using move_base package on ROS 1 Melodic. Current issue is that when the robot approaches a short obstacle, the obstacle is first correctly drawn to local costmap, but closer the robot gets to it, it starts to clear it from the costmap. I believe this happens because of the fact that the camera has a blind spot (~30cm) in front of the robot. When the camera doesn't see the obstacle anymore, move_base obstacle layer does raytracing over it to the next nearest obstacle and clears the closest one from the costmap. Desired behavior would be that the robot doesn't remove the obstacle from local costmap even when it is in the blind spot. So the question is, is there a way to avoid this from happening? I believe one solution would be to have minimum distance for the raytracing (== 30cm, length of the blind spot), under which raytracing is not done, but move_base currently doesn't seem to have this sort of parameter. I'm using Intel D435i depth camera which publishes a pointcloud from short distance and a laser scan from longer distance. This is how the obstacles layer looks like: Robot approaching a short obstacle:
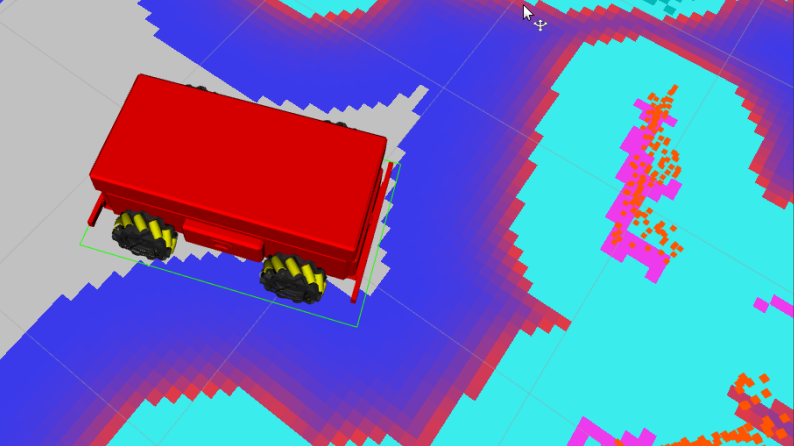
Robot has moved close enough for the obstacle to disappear from the local costmap
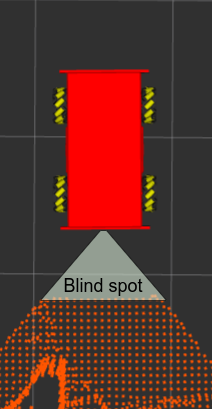
Visualization of the blind spot of the Intel camera. Visible area marked with orange points.
|
| 2021-04-09 01:54:03 -0500 | received badge | ● Notable Question (source) |
| 2021-03-31 00:24:50 -0500 | commented answer | Obstacles in camera blind spot are cleared from local costmap Nice! We will switch to ROS2 in the near future, so it is great to hear that this feature is already supported. So maybe |
| 2021-03-31 00:20:04 -0500 | received badge | ● Popular Question (source) |
| 2021-03-30 06:09:20 -0500 | asked a question | Obstacles in camera blind spot are cleared from local costmap Obstacles in camera blind spot are cleared from local costmap I'm trying to implement obstacle avoidance using move_base |
| 2020-12-04 10:48:31 -0500 | received badge | ● Necromancer (source) |
| 2020-12-04 10:48:31 -0500 | received badge | ● Teacher (source) |
| 2020-12-04 09:31:19 -0500 | answered a question | Strange problem with ROSLaunchParent Same error happens in Melodic as well. Since you don't pass any launch arguments, you can just simply start the launch f |
| 2020-11-20 04:05:30 -0500 | received badge | ● Enthusiast |
| 2020-11-03 04:48:20 -0500 | received badge | ● Supporter (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.