The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-10-13 09:38:58 -0500 | received badge | ● Famous Question (source) |
| 2023-07-25 19:36:33 -0500 | received badge | ● Notable Question (source) |
| 2023-07-25 19:36:33 -0500 | received badge | ● Famous Question (source) |
| 2023-07-22 06:39:56 -0500 | marked best answer | is inertia important? Like do we need to add inertia to urdf, like when I just set it 0 it still works but when I set to some value it explodes. |
| 2023-01-17 21:28:51 -0500 | received badge | ● Great Question (source) |
| 2022-11-26 09:52:47 -0500 | received badge | ● Popular Question (source) |
| 2022-11-25 08:59:04 -0500 | asked a question | Extrapolation Error: Lookup would require extrapolation Extrapolation Error: Lookup would require extrapolation i am working on a slam robot using only rplidar only, without an |
| 2022-11-24 12:23:00 -0500 | received badge | ● Famous Question (source) |
| 2022-11-02 09:45:21 -0500 | received badge | ● Famous Question (source) |
| 2022-09-12 14:25:26 -0500 | received badge | ● Famous Question (source) |
| 2022-08-26 05:35:11 -0500 | received badge | ● Good Question (source) |
| 2022-08-12 08:07:02 -0500 | received badge | ● Famous Question (source) |
| 2022-07-30 14:33:45 -0500 | received badge | ● Famous Question (source) |
| 2022-05-25 10:15:24 -0500 | received badge | ● Famous Question (source) |
| 2022-05-20 16:56:47 -0500 | received badge | ● Nice Question (source) |
| 2022-03-08 07:09:52 -0500 | received badge | ● Notable Question (source) |
| 2022-02-07 16:51:30 -0500 | marked best answer | TF_REPEATED_DATA ignoring data with redundant timestamp for frame link_left_wheel at time 618.268000 according to authority unknown_publisher when ever i start my navigation stack i get this error |
| 2022-02-04 05:18:21 -0500 | edited question | control robot using PCA9685 controller control robot using PCA9685 controller hey, i have a robot arm I want to use the PCA9685 controller for it using raspber |
| 2022-02-04 05:18:21 -0500 | received badge | ● Associate Editor (source) |
| 2022-02-04 04:53:35 -0500 | asked a question | control robot using PCA9685 controller control robot using PCA9685 controller hey, i have a robot arm I want to use the PCA9685 controller for it using raspber |
| 2022-01-27 22:57:40 -0500 | received badge | ● Famous Question (source) |
| 2022-01-24 00:04:03 -0500 | received badge | ● Notable Question (source) |
| 2022-01-21 09:52:16 -0500 | marked best answer | connect ros with real robot i have 6 dof robot arm in real-world and one in ros now i want to control it with ros using raspberry pi, i don't know how to start can somebody help with that |
| 2022-01-21 08:22:45 -0500 | received badge | ● Notable Question (source) |
| 2022-01-20 12:43:41 -0500 | commented question | connect ros with real robot @osilva thanks for the replay,i was making a model myself using servo brackets, so its a custom design and i am using mg |
| 2022-01-20 12:20:25 -0500 | received badge | ● Popular Question (source) |
| 2022-01-20 00:49:40 -0500 | asked a question | connect ros with real robot connect ros with real robot i have 6 dof robot arm in real-world and one in ros now i want to control it with ros using |
| 2022-01-16 11:09:12 -0500 | received badge | ● Notable Question (source) |
| 2022-01-16 01:30:59 -0500 | received badge | ● Student (source) |
| 2022-01-16 00:18:25 -0500 | commented question | robot arm does not move to position @osilva I have updated that in question |
| 2022-01-16 00:17:40 -0500 | edited question | robot arm does not move to position robot arm does not move to position i made a custom robot arm, when i move it to a goal location it seems it is not goin |
| 2022-01-16 00:17:13 -0500 | edited question | robot arm does not move to position robot arm does not move to position i made a custom robot arm, when i move it to a goal location it seems it is not goin |
| 2022-01-15 07:44:42 -0500 | commented question | robot arm does not move to position @osilva sorry for the late reply, like what kinda info do you want? |
| 2022-01-15 04:24:03 -0500 | received badge | ● Popular Question (source) |
| 2022-01-14 07:14:50 -0500 | received badge | ● Notable Question (source) |
| 2022-01-14 07:14:01 -0500 | asked a question | robot arm does not move to position robot arm does not move to position i made a custom robot arm, when i move it to a goal location it seems it is not goin |
| 2022-01-14 04:41:52 -0500 | received badge | ● Popular Question (source) |
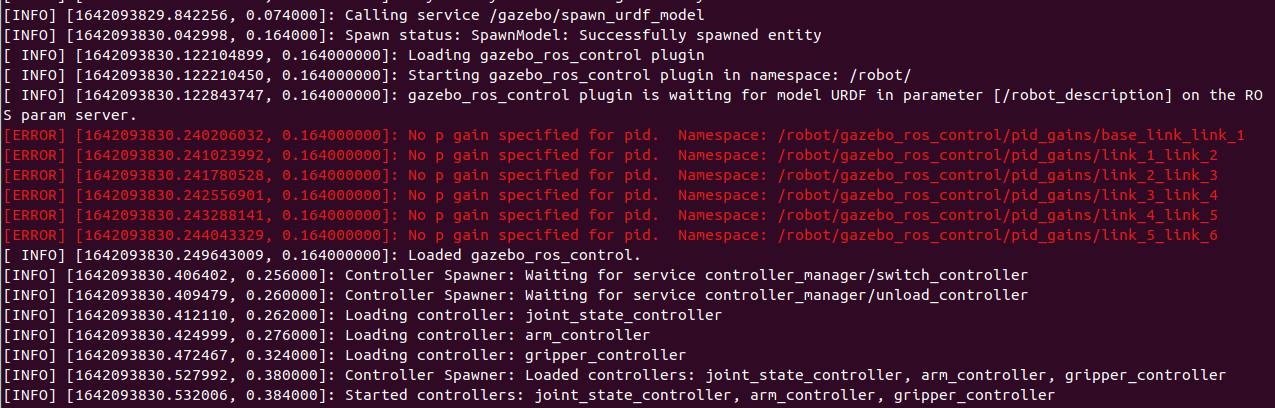
| 2022-01-13 23:41:24 -0500 | marked best answer | No p gain specified for pid I have made custom urdf for 6 DOF robot, when I run it it shows this error
I have added ros control to this this is the YAML file robot: #list of controllers joint_state_controller: type: joint_state_controller/JointStateController publish_rate: 50 i am used ros noetic |
| 2022-01-13 23:41:23 -0500 | commented answer | No p gain specified for pid thanks for that |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.