The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-02-01 09:22:20 -0500 | received badge | ● Nice Question (source) |
| 2016-03-21 04:49:47 -0500 | received badge | ● Good Question (source) |
| 2016-03-17 11:15:17 -0500 | received badge | ● Notable Question (source) |
| 2015-12-08 04:14:44 -0500 | received badge | ● Nice Question (source) |
| 2015-08-21 00:47:57 -0500 | received badge | ● Famous Question (source) |
| 2015-08-21 00:47:57 -0500 | received badge | ● Notable Question (source) |
| 2015-06-22 01:26:11 -0500 | marked best answer | Non-existent package gazebo in ROS hydro Hi All, I am using rosmake a package in ROS hydro, but it gives me below errors: It seems that there is no gazebo dependency any more in ROS hydro. Does anyone know which dependency I should use to replace gazebo? The manifest.xml of the stack 'labrob_hummingbird_controller' can be found below: |
| 2015-03-11 10:33:00 -0500 | received badge | ● Famous Question (source) |
| 2015-02-04 08:18:25 -0500 | received badge | ● Famous Question (source) |
| 2014-12-16 03:58:00 -0500 | received badge | ● Notable Question (source) |
| 2014-12-11 02:50:56 -0500 | received badge | ● Popular Question (source) |
| 2014-12-09 06:52:11 -0500 | received badge | ● Popular Question (source) |
| 2014-12-06 23:15:32 -0500 | asked a question | How to run controller_manager Hi All, I use a launch file to load a controller: When I run the launch file, the system said waiting for service controller_manager/load_controller. But when I type Do I need to run controller_manager first before calling that service? If yes, how I run controller_manager? Thanks in advanced. |
| 2014-11-20 14:57:04 -0500 | received badge | ● Popular Question (source) |
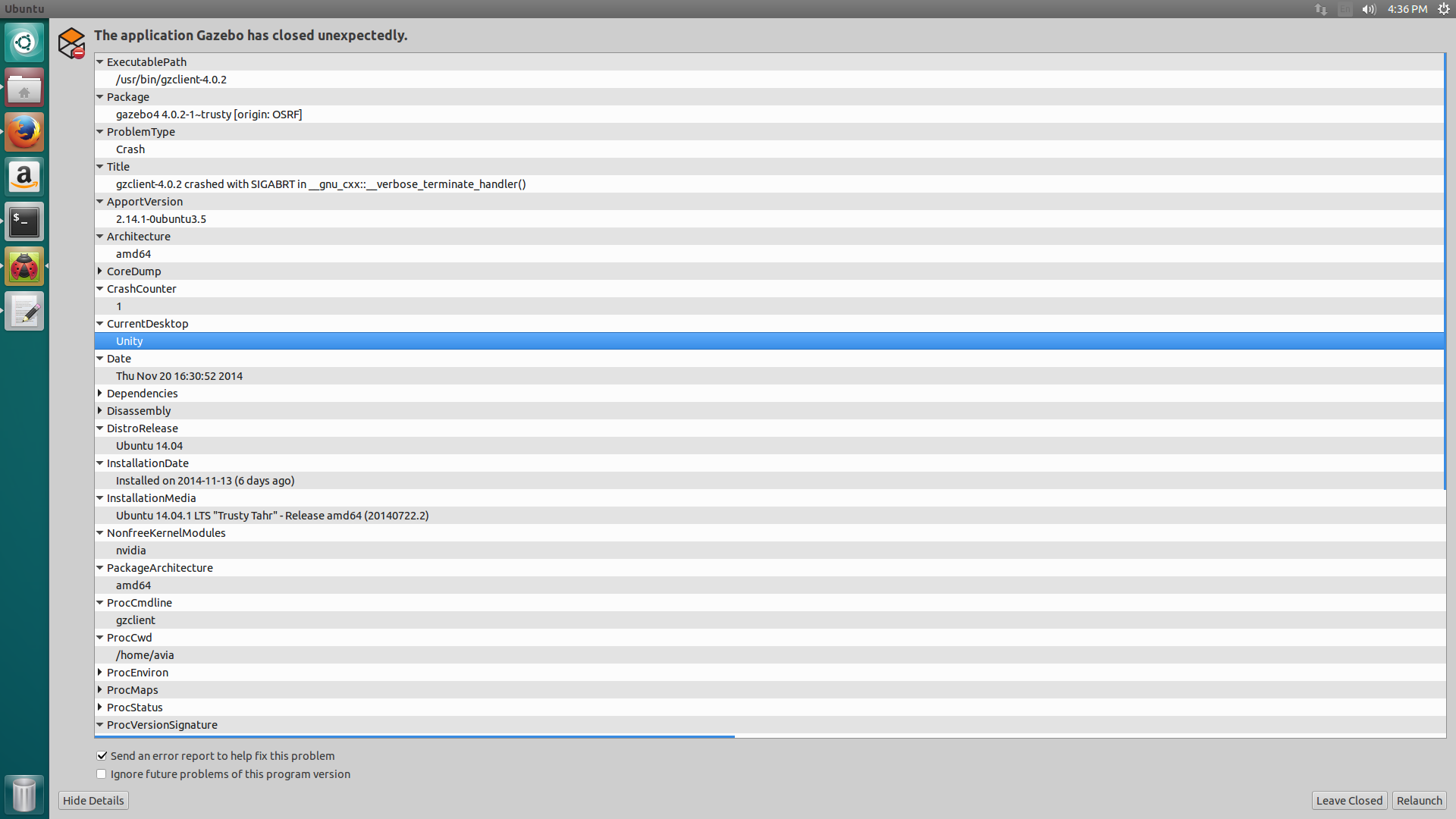
| 2014-11-19 16:07:43 -0500 | asked a question | Qt has caught an exception to make Gazebo shut down Hi All, I have a Ubuntu 14.04 64bits (including Xubuntu interface). I followed below command to install Gazebo: I have a nvidia quadro fx 550 graphic card and I installed NVIDIA legacy binary driver-version 304.117(open source) from Additional Drivers. However, after I run gazebo, the GUI window will pop out and instantly shut down by giving below error: And: lsmod result: link text glxgears: link text glxinfo(let me know if it is incomplete): link text Exception shows in ~/.gazebo/ogre.log: link text Error report:
Can anyone give me some help? Let me know if you need any further information. Thanks in advanced. |
| 2014-08-26 08:54:16 -0500 | commented answer | can not install ROS in Ubuntu 13.04 Thanks for your response. I did not know how to switch my sources.list and tried several time but failed. I have just installed ubuntu 14.04 and successful installed ROS Indigo. So it must be some problems in ubuntu 13.04. |
| 2014-08-25 21:47:49 -0500 | commented answer | can not install ROS in Ubuntu 13.04 Hi ahendrix, I have met similar problem. Have you got it fixed? Thanks for your help. |
| 2014-07-27 06:36:07 -0500 | received badge | ● Notable Question (source) |
| 2014-07-27 06:36:07 -0500 | received badge | ● Famous Question (source) |
| 2014-07-25 14:19:57 -0500 | received badge | ● Popular Question (source) |
| 2014-05-28 19:10:11 -0500 | asked a question | spawn urdf model in gazebo by C++ Hi all, I plan to spawn a robot urdf model in gazebo by C++. Can anyone kindly introduce me any tutorial or code template for doing this? My finally objective is to implement my algorithm to control this robot in C++. Thanks for your help. |
| 2014-05-25 02:36:36 -0500 | received badge | ● Famous Question (source) |
| 2014-05-19 18:57:59 -0500 | received badge | ● Notable Question (source) |
| 2014-05-18 21:53:37 -0500 | received badge | ● Famous Question (source) |
| 2014-04-20 06:56:52 -0500 | marked best answer | Roslaunch cannot launch node of type: gazebo Hi All, Currently I am trying to insert hector quadrotor model in gazebo 1.9. When I use rosrun to spawn robot model: It works fine and tell me: However, when I use roslaunch: It gives me Why it can find gazebo/spawn_urdf_model when using rosrun but can not find it when using roslaunch? I am using ROS Hydro. Below also please find my gazebo.launch: |
| 2014-04-20 06:55:29 -0500 | marked best answer | Error for rosmake mav_tools Dear All, I have successfully installed mav_tools. However, when I run 'rosmake mav_tools' below error occurs: viki@ROS:~$ rosmake mav_tools My ubuntu version is: VirtualBox virtual image with Ubuntu 12.04.1 LTS and ROS Fuerte . Please give me your help. Thx. |
| 2014-04-17 10:21:30 -0500 | received badge | ● Popular Question (source) |
| 2014-04-17 09:18:25 -0500 | asked a question | Starting rviz, failed to control interactive markers automatically Hi everyone, Now I am following rviz tutorial to control interactive markers. I want to edit the code in below link to let the marker move towards one direction every 5 seconds automatically without dragging the arrow: http://wiki.ros.org/rviz/Tutorials/In... I have added a for loop in the code and changed box_marker.pose.position value for each loop. But the marker didn't moved and its length got extended. Would you please instruct me which value should I change to meet my requirement? I appreciate your help. |
| 2014-04-15 11:44:53 -0500 | marked best answer | Starting rviz tutorial, fail to send markers Hi Guys, I am following rviz tutorial below http://wiki.ros.org/rviz/Tutorials/Ma... I have downloaded the C++ Codes and use catkin to make it as a ros-package. Then I have runned But I still not able to find any markers and shapes in rviz. After I did |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.