
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-03-25 15:25:50 -0500 | received badge | ● Great Question (source) |
| 2019-05-13 07:57:02 -0500 | received badge | ● Necromancer (source) |
| 2018-05-17 16:20:24 -0500 | received badge | ● Good Question (source) |
| 2017-04-03 14:58:25 -0500 | received badge | ● Nice Question (source) |
| 2014-09-17 15:05:23 -0500 | received badge | ● Good Question (source) |
| 2014-01-28 17:22:43 -0500 | marked best answer | trying to run vslam_system on mono video data i am trying to run vslam_system[mono] on my video stream everything seems to go fine, but when the images are published on mono_vslam_node for processing , i get this , i guess the error has something to do Pose-estimator , can anybody provide me the solution to get rid of this error . why is the good points 0 and i can't understand what this line is trying to say /opt/ros/diamondback/stacks/geometry/eigen/include/Eigen/src/Core/Assign.h:510: Derived& Eigen::DenseBase<derived>::lazyAssign(const Eigen::DenseBase<otherderived>&) [with OtherDerived = Eigen::CwiseUnaryOp<eigen::internal::scalar_quotient1_op<double>, const Eigen::Block<eigen::matrix<double, 3,="" 1,="" 0,="" 3,="" 1="">, -0x00000000000000001, 1, false, true> >, Derived = Eigen::Matrix<double, 3,="" 1,="" 0,="" 3,="" 1="">]: Assertion `rows() == other.rows() && cols() == other.cols()' failed. and the log file does not have a entry related to this error . |
| 2014-01-28 17:22:42 -0500 | marked best answer | vslam node crashes after some time . I am running vslam on a stereo image data set , i am sending the 4 topics synchronously and also all the images are rectified and undistorted .I can see the camera trajectory and the point cloud in rviz . but i have these 2 problems :
|
| 2014-01-28 17:22:41 -0500 | marked best answer | vslam does not publish visual odometry data . The vslam seems to work fine for stereo stream but The topic /vo is advertised but it is not published , and i can see no output when i do : rostopic echo /vo So what might be wrong ? |
| 2014-01-28 17:22:37 -0500 | marked best answer | Stereovslam error :: Assertion `left_.tfFrame() == right_.tfFrame()' After i publish my two left and right videos from stereo camera and run stereo_synchronizer node and stereo_image_proc node everything seems to go file but i get this error from stereo_vslam_node and see no output: stereo_vslam_node: /opt/ros/diamondback/stacks/vision_opencv/image_geometry/src/stereo_camera_model.cpp:28: bool image_geometry::StereoCameraModel::fromCameraInfo(const sensor_msgs::CameraInfo&, const sensor_msgs::CameraInfo&): Assertion `left_.tfFrame() == right_.tfFrame()' failed.
|
| 2014-01-28 17:22:27 -0500 | marked best answer | What is the axis system followed in rviz ?? This is very basic question , sorry for asking but i can't find the information .. What is the Grid plane in rviz , is it XY or YZ or ZX ? |
| 2014-01-28 17:22:16 -0500 | marked best answer | No accelerated colorspace conversion found When i try to run some custom node to process some .avi video i have this error : i guess this error is related to opencv , i have tried all the sloutions , even recompiled vision_opencv with FFMPEG flag on , and urgraded ffmped with --enable-shared --enable-gpl --enable-swscale , but still no luck . i can't proceed with my project , until i sort this out and i already have wasted more than 10hrs on this problem , so if you guys think of any solution i would be glad to try it out . |
| 2014-01-28 17:22:14 -0500 | marked best answer | rviz: OGRE EXCEPTION(3:RenderingAPIException): Unable to create a suitable GLXContext in GLXContext When i try to run "rosrun rviz rviz" i get this output : After wasting more than 5 hours on this , i still can't figure out the solution. :( . Please help . |
| 2013-12-12 17:35:24 -0500 | received badge | ● Nice Question (source) |
| 2013-01-17 11:27:18 -0500 | received badge | ● Notable Question (source) |
| 2013-01-17 11:27:18 -0500 | received badge | ● Famous Question (source) |
| 2012-09-14 05:02:16 -0500 | received badge | ● Famous Question (source) |
| 2012-09-14 05:02:16 -0500 | received badge | ● Popular Question (source) |
| 2012-09-14 05:02:16 -0500 | received badge | ● Notable Question (source) |
| 2012-09-11 00:08:59 -0500 | received badge | ● Notable Question (source) |
| 2012-09-11 00:08:59 -0500 | received badge | ● Famous Question (source) |
| 2012-09-02 19:14:39 -0500 | received badge | ● Famous Question (source) |
| 2012-09-02 19:14:39 -0500 | received badge | ● Notable Question (source) |
| 2012-09-02 19:14:39 -0500 | received badge | ● Popular Question (source) |
| 2012-08-22 08:34:00 -0500 | received badge | ● Famous Question (source) |
| 2012-08-22 08:34:00 -0500 | received badge | ● Popular Question (source) |
| 2012-08-22 08:34:00 -0500 | received badge | ● Notable Question (source) |
| 2012-06-14 06:09:32 -0500 | received badge | ● Famous Question (source) |
| 2012-05-21 21:21:21 -0500 | received badge | ● Popular Question (source) |
| 2012-04-27 07:01:10 -0500 | received badge | ● Famous Question (source) |
| 2012-03-05 00:24:54 -0500 | received badge | ● Popular Question (source) |
| 2012-01-17 20:17:49 -0500 | received badge | ● Notable Question (source) |
| 2011-11-04 12:31:20 -0500 | received badge | ● Notable Question (source) |
| 2011-10-24 00:53:08 -0500 | received badge | ● Popular Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
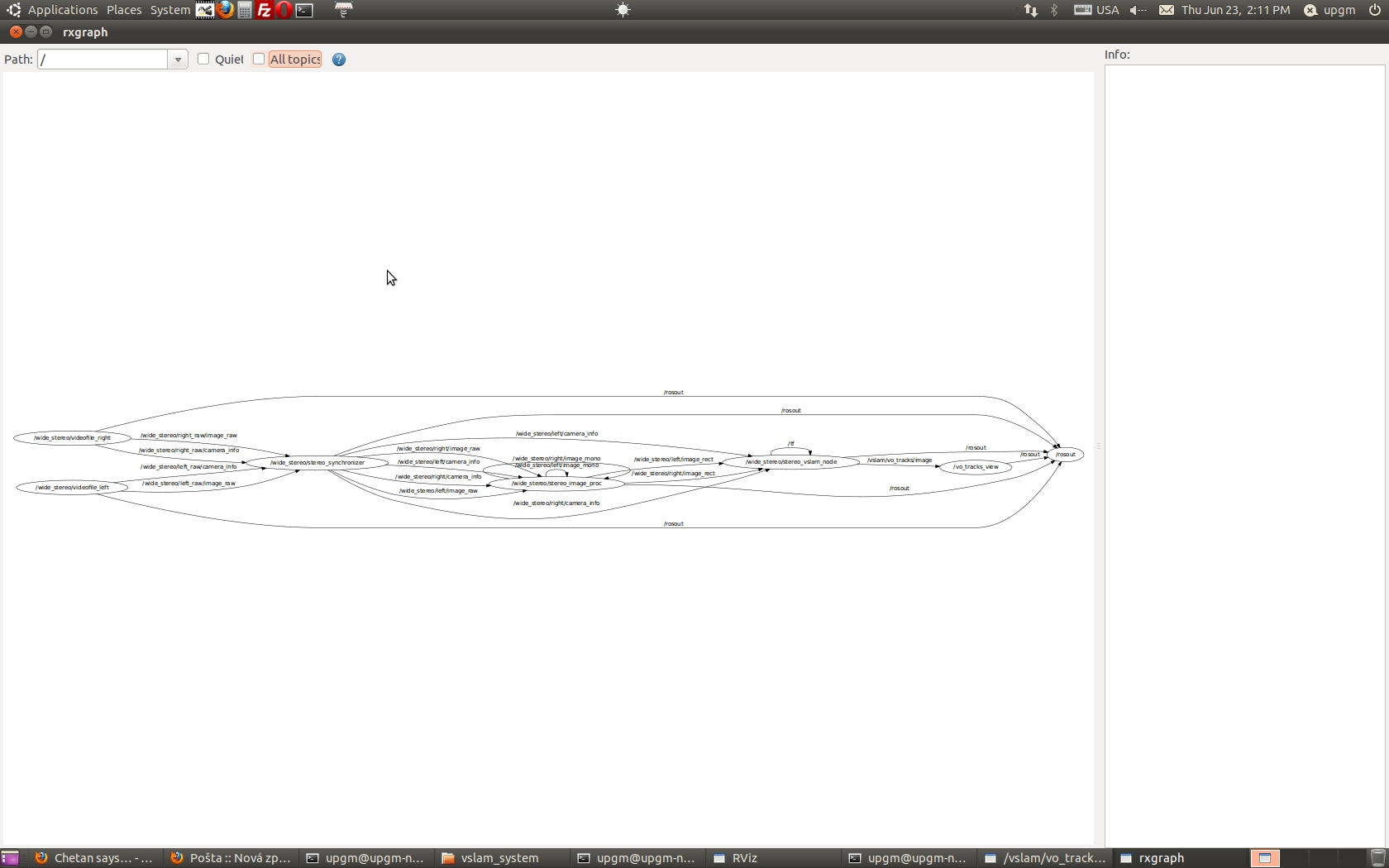 You can zoom in the file by opening it in another window.
Here is how my system looks , does anybody has anyidea what might be going wrong ??
You can zoom in the file by opening it in another window.
Here is how my system looks , does anybody has anyidea what might be going wrong ??