The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-04-01 06:22:24 -0500 | received badge | ● Nice Question (source) |
| 2022-08-25 08:40:43 -0500 | received badge | ● Famous Question (source) |
| 2022-06-07 08:17:10 -0500 | received badge | ● Taxonomist |
| 2022-05-10 04:01:27 -0500 | received badge | ● Enlightened (source) |
| 2022-05-10 04:01:27 -0500 | received badge | ● Good Answer (source) |
| 2021-11-22 06:34:33 -0500 | received badge | ● Notable Question (source) |
| 2021-11-16 10:15:27 -0500 | commented question | sdk from meta-ros Hi, sry for my late reply. I missed your request. I've added a description of the steps I took till now. |
| 2021-11-16 10:12:55 -0500 | answered a question | sdk from meta-ros I've never build a ROS 2 only ROOTFS/toolchain, it was always included in the company internal project. And it is also n |
| 2021-11-03 00:37:08 -0500 | received badge | ● Popular Question (source) |
| 2021-08-12 09:41:46 -0500 | commented question | sdk from meta-ros Building single ROS dependent cmake projekts seems to works now, with the above described steps (only tested with a very |
| 2021-08-06 10:53:11 -0500 | commented question | sdk from meta-ros After that, it seems like only foonathan-memory-staticdev where missing for a first minimal working version. However the |
| 2021-08-06 04:41:45 -0500 | commented question | sdk from meta-ros The problem regarding the not found RMW_IMPLEMENTATION where caused by the ament_index not been set up correctly. I coul |
| 2021-08-05 10:45:14 -0500 | commented question | sdk from meta-ros The problem regarding the not found RMW_IMPLEMENTATION where caused by the ament_index not been set correctly. I could b |
| 2021-08-05 03:04:31 -0500 | asked a question | sdk from meta-ros sdk from meta-ros Hi, I'm trying to get a minimal setup of ROS 2 working for my companies eco system, which requires an |
| 2021-07-22 09:31:44 -0500 | received badge | ● Famous Question (source) |
| 2021-07-22 09:31:44 -0500 | received badge | ● Notable Question (source) |
| 2021-01-15 12:52:15 -0500 | commented answer | Create (all) deb-packages of ROS distro Thank you for these clear warnings ;). It would be nice if you could give me a heads up when you have the first version |
| 2021-01-14 09:06:35 -0500 | commented answer | Create (all) deb-packages of ROS distro Thank you very much for your answer. I hoped that there would be a minimal setup or workaround. I'm not sure if Fat Arc |
| 2021-01-11 04:44:06 -0500 | received badge | ● Popular Question (source) |
| 2021-01-07 10:51:55 -0500 | asked a question | Create (all) deb-packages of ROS distro Create (all) deb-packages of ROS distro Hello, in the group I'm working at we're started to use ROS 2 (currently Foxy) |
| 2019-04-08 07:25:59 -0500 | received badge | ● Good Question (source) |
| 2018-11-07 03:51:32 -0500 | marked best answer | Get one(pitch) euler angle between two orientations (quaternions) Hi, I want to get the angle between 2 quaternions (as euler angle), but the angle always needs to be from q1 to q2 (not the shortest angle). But since there are two ways to get an angle, I need to find the one I need. The following code works, but I'm looking for a nicer solution. |
| 2018-11-07 03:51:27 -0500 | answered a question | Get one(pitch) euler angle between two orientations (quaternions) In the angles.h from the angles package one can found a lot of functions. |
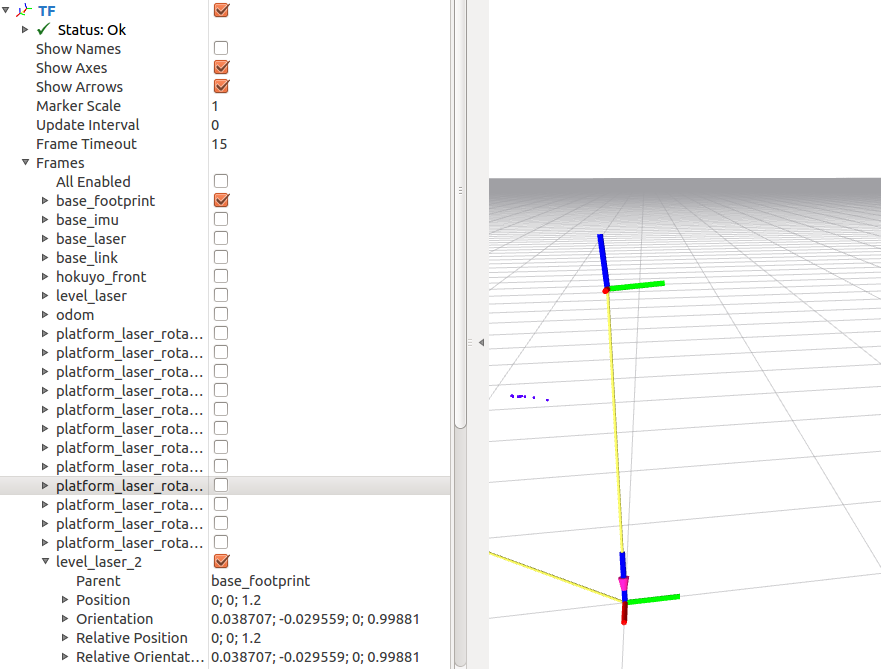
| 2018-11-07 03:47:13 -0500 | marked best answer | tf::TransformListener gets wrong tf Hello, TL;DR tf::TransformListener gets a different transform than shown in RVIZ I am having quite a strange problem. I am using a rosbag file to playback recorded data and I am adding new transforms and using them while doing that: The transform is published with a python node, where the origin is static (defined with cfg-values) and the rotation is coming from the values of an IMU. The interesting part how the tf is published should be this (in the callback of the IMU subscription): With the following values: The created Transform in RVIZ looks like expected. It's 1.2m above base_footprint with some rotation on top. In the picture, the Fixed Frame is set to "base_footprint"
However if I lookup the transform in a ROS node using the tf::TransformListener I get a different result: The output of this is: But it should be something like: Does anybody know what I am doing wrong? Thank you for your help, Tobias |
| 2018-11-07 03:47:07 -0500 | answered a question | tf::TransformListener gets wrong tf It's not solved, but I've found a workaround by using a different node and therefore I'm closing this question. I'm sor |
| 2018-11-07 03:45:18 -0500 | commented answer | tf::TransformListener gets wrong tf Thank you, that might've be wrong as well. But I would have expected a translation of 1.2m, instead I got something arou |
| 2018-02-02 09:37:58 -0500 | received badge | ● Famous Question (source) |
| 2018-01-30 12:11:00 -0500 | received badge | ● Famous Question (source) |
| 2017-07-24 17:10:35 -0500 | received badge | ● Famous Question (source) |
| 2017-07-11 09:18:38 -0500 | marked best answer | Getting hierarchy level of yaml parameter Hi, I want to use ros param to traverse files like this: There I would like to get all cascades of the param "filter". In the node pcl_filter I search for something like But this just seems to work with something like: And: just workes with: Does somebody know a way to get all of these parameter? Thanks for your help |
| 2017-06-23 11:48:53 -0500 | received badge | ● Nice Answer (source) |
| 2017-06-23 11:48:51 -0500 | received badge | ● Notable Question (source) |
| 2017-04-20 16:26:56 -0500 | marked best answer | velodyne_driver displays ellipse of laser beams instead of circle Hello, we are using the Velodyne HDL-64E S2 with ROS Hydro for indoor mapping. During this we saw, that the ROS.driver for the Velodyne creates Pointclouds where the Laser-beams are in an ellipse instead of a cicle. In the following archive are 3 Scans taken at the same possition: archive
There you can see the same room (and out of the window). Where the scans taken with the original- and pcl-driver are showing straight walls, the ros-driver does not. The following archive shows the same drivers at a different possition, where the laser-beams hitting mostly the ground: archive
There you can see that the original- and pcl-driver are displaying one beam as a circle, where the ros-driver is creating an ellipse. This is the launch-file that was used for the ros-driver: file Does anybody has the same experience and/or a solution, or do we have an error in our launch-file? |
| 2017-02-24 07:09:07 -0500 | received badge | ● Nice Question (source) |
| 2017-02-23 11:35:05 -0500 | received badge | ● Popular Question (source) |
| 2017-02-23 06:58:52 -0500 | marked best answer | Playback of rosbag with tf2-static transforms Hello ROS users, I've got a robot setup where (most) of the static transforms are defined by an URDF (which results in tf2-static tfs). During a testrun we recoded plenty of bag-files which where splitted after 1 min. The static transforms are only contained in the 1. bagfile. (1. Question) Is there a way to record splitted bagfiles with static-tfs, that the static-tfs are contained in each bag-file? Furthermore (2. question), if the bagfile containing the static-tfs is played, they are only received by rviz (and probably other nodes as well) if rviz was started prior the playback of the bag-file, which seems for me like a bug. Is there a solution to fix that (e.g. have rviz receiving the static-tfs even when its started lets say 2sec after the rosbag playback started)? regards |
| 2017-02-23 06:47:37 -0500 | received badge | ● Self-Learner (source) |
| 2017-02-23 06:47:37 -0500 | received badge | ● Teacher (source) |
| 2017-02-23 06:41:42 -0500 | marked best answer | How to detect broken rosbag files Hello ROS users, I've recorded plenty rosbag files during a testrun with a 1min split and lz4 compression. Afterwards some of the data got corrupted (by the harddrive, not an error with rosbag). When playing the rosbag files, it works and starts normally, but if rosbag hits a broken file, I get the following msg: I now want to identify the broken rosbag-files and either try to fix them or if they are not fixable, delete them. But I don't find a way to identify these broken files, does anybody know a way? My first thought was to use "rosbag check", but this seems not to be intended for this use, or is it and I am not able to see this? Does anybody had a similar problem and does know a solution in the ROS eco-system? kindly regards |
| 2017-02-23 06:41:36 -0500 | answered a question | How to detect broken rosbag files Since there does not seem to be a solution within the ROS eco system, I wrote a script that uses rosbag decompress to go though all bag-files, detects which are broken and then reindexes them. This is of course not my preferred solution but it works, if your bag-files are not compress this might not work, you can try to use "rosbag play -i" instead, but this just triggers an error if you also listen on the published topics. regards |
| 2017-02-22 12:22:40 -0500 | received badge | ● Notable Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.