
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2017-11-16 10:15:53 -0500 | received badge | ● Nice Question (source) |
| 2017-10-05 02:29:53 -0500 | received badge | ● Student (source) |
| 2014-04-20 06:47:39 -0500 | marked best answer | Getting point cloud data from the kinect hi guys, i am new to kinect. I need point cloud data from the depth camera in kinect. Any of you have any idea how to go about doing it? i am using ROS diamondback and Ubuntu. |
| 2014-01-28 17:22:30 -0500 | marked best answer | How does cloud_to_laserscan.cpp work I have some more qns regarding cloud_to_scan.cpp. the post was previously posted[http://answers.ros.org/question/1561/doubts-about-pointcloud-to-laser-scan] but it was not answered. I am in need of urgent help. Qn 1)if (output->ranges[index] * output->ranges[index] > range_sq) output->ranges[index] = sqrt(range_sq);, what is this statement trying to do.. not that sure... qn 2) is the x, y and z in metres?or what are the units for the x,y and z? qn 3) why is the angle = -atan2(x,z) and not angle = -atan2(z,x) |
| 2014-01-28 17:22:28 -0500 | marked best answer | From Laserscan to obstacle avoidance I have got the laser scan from the kinect using the openni_driver. Now i would like to use it for obstacle avoidance. For obstacle avoidance, i am using vector field histogram. Any suggestions or directions i could take? |
| 2014-01-28 17:22:26 -0500 | marked best answer | Doubts about pointcloud to laser scan I was referred to this code previously. I have some doubts about this code, like to clarify some of them. 1) where does the M_PI/2 in the angle_min and angle_max come from? 2) why is it range_sq = x^2 + z^2? shldnt it be range_sq = y^2 + z^2? correct me if i am wrong.. if x is the horizontal and y is the vertical, then z shld be in the negative direction(coming out of the image ... (more) |
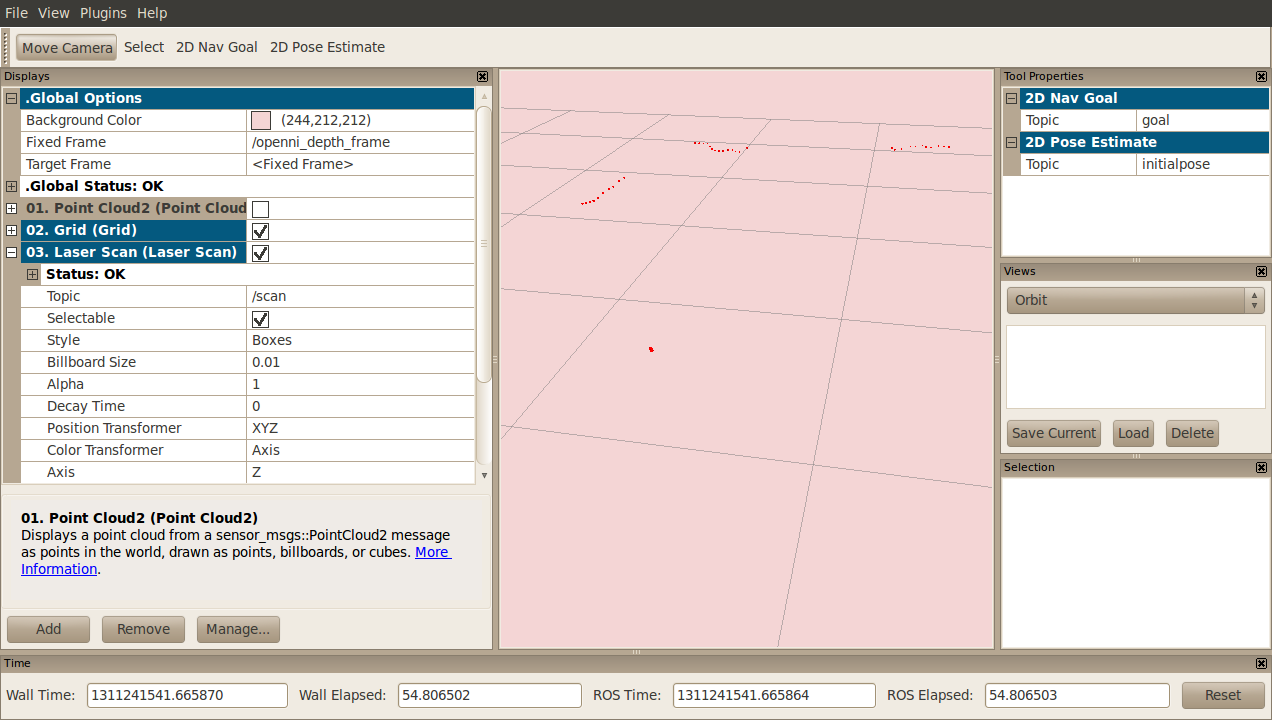
| 2014-01-28 17:22:26 -0500 | marked best answer | Problem launching pointcloud to laserscan I am not able to launch the pointcloud to laserscan. I did this following steps: 1)launched the openni_camera by typing roslaunch openni_camera openni_node.launch 2)launched the pointcloud to laserscan by typing roslaunch pointcloud_to_laserscan kinect_laser.launch 3)ran rviz by typing rosrun rviz rviz I am able to see the point cloud but I am not able to see the laser_scan. I was referring to this question,http://answers.ros.org/question/417/how-to-setup-pointcloud_to_laserscan. I am supposed to see /scan topic but i am not able to see it. Am i supposed to change /openni_depth_frame? Or what steps i shld take? Any suggestions? Just like to check with you all.. is this sometime like this i should get?C:\fakepath\Screenshot-RViz-1.png |
| 2014-01-28 17:22:25 -0500 | marked best answer | From point cloud to laser scan Hi i can get the point cloud data from the OpenNI driver now, like to convert it into a laser scan.How do you do it? Any suggestions or directions that i can take? |
| 2014-01-28 17:22:24 -0500 | marked best answer | Publishing data using OpenNI Hi guys, Although, i am able to find the depth pointer and find the depth value. Now i need to publish the data and want to visualize the point cloud in Rviz. I have written a code and would like to have your opinions. |
| 2014-01-28 17:22:24 -0500 | marked best answer | Problem with opencv2 i need to include the following files: but i always get this error. Opencv2\opencv.hpp: No such file or directory what shld i do? will adding this line <depend package="opencv2"/> solve the problem? |
| 2014-01-28 17:22:23 -0500 | marked best answer | Problem setting fixed frame in Rviz. I am already able to publish the data, in the sense that when i type the rostopic hz -> i get the topic that i am publishing. But have difficulty visualizing the data and moreover, i can't select anything under fixed frame and target frame.there is a global warning saying that is no tf data and that Fixed Frame does not exist. I now know i need to have to a launch file that converts static_transform_publisher from /world to /kinect_depth and set the fixed frame to /kinect_depth. 1)i am not sure where to add this file to? 2) there is a statement args = " 0 0 1.10 -1.57 0 -1.57 /world /kinect_rgb 10" what does the 10 stand for and what are the other values(such as 0, 1.1) for? having those two questions answered, i got a few more to ask( i apologise if the qns are wrong).. 3) what should i type to launch the kinect_camera. is it roslaunch kinect_camera kinect_with_tf.launch? if so, it is wrong to type roscore only? 4) must u have always have a launch file? can u work without a launch file? 5)is better to use tf::transformbroadcaster or it is better to use just launch file? Please pardon me for the qns.. i am newbie in ROS, point cloud. Any help would be much appreciated.. thanks... for env | grep ROS i get |
| 2014-01-28 17:22:18 -0500 | marked best answer | How to obtain the R and T of the kinect camera? I am not sure how to obtain the Rotation(R) and Translation(T) matrices for the kinect camera. How can i find it? |
| 2014-01-28 17:22:18 -0500 | marked best answer | How to construct the point cloud data from the depth data I have already acheived the depth data from the Kinect using the openkinect driver. I have already got the data for the x, y and z of the point cloud.Now, I need to plot point cloud data and would like to visualize it in rviz.How do i go about doing it? Any help would be appreciated.. |
| 2014-01-28 17:22:15 -0500 | marked best answer | Getting Point cloud data from Openni driver Previously, I posted how to get started on the point cloud data for the Openni. Many of you posted that i need to get through the tutorials for ROS to have a better understanding. I have done that now.One posted this code(for the subscriber) for me... which was very helpful.I have some qns on this code: 1) We need to have both a publisher and subscriber node for the Kinect in order to get point cloud data.Am i right to say that? 2) how do u get the depth data from the point cloud data? Really need of help. I am sorry if i ask stupid questions. |
| 2014-01-28 17:22:14 -0500 | marked best answer | Problem with installing the Openni_kinect when i try to install the openni_kinect, i face a few problems... when i type: rosinstall ~/openni_kinect PATH_TO_EXISTING_ROS_TREE 'http://www.ros.org/wiki/openni_kinect?action=AttachFile&do=get&target=openni_kinect.rosinstall' i get this as the answer: E: rosinstall operating on /home/user/openni_kinect from specifications in rosinstall files PATH_TO_EXISTING_ROS_TREE, http://www.ros.org/wiki/openni_kinect...
ahhhh error opening file: [Errno 2] No such file or directory: '/home/user/drivers/PATH_TO_EXISTING_ROS_TREE'
Usage: rosinstall PATH [ rosinstall: error: None what should i do? |
| 2014-01-28 17:22:12 -0500 | marked best answer | Kinect Depth calculation Sorry guys, i am desperate for answer. That is why i didn't follow the rules of this website. I sincerly apologise. For this code, i have come up with a better one. float cx = 320.0; float cy = 240.0; float minDistance = -10; float scaleFactor = 0.0021; } is this code better? i have tried to save the depth data but all the data is zero. I don't know where is the problem? |
| 2014-01-28 17:22:11 -0500 | marked best answer | Vector field histogram. Any of you have used vector field histogram?I am trying to combine the Kinect and the vector field histogram but not sure how to do it. Any help would be appreciated. |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
{kind=link}