The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
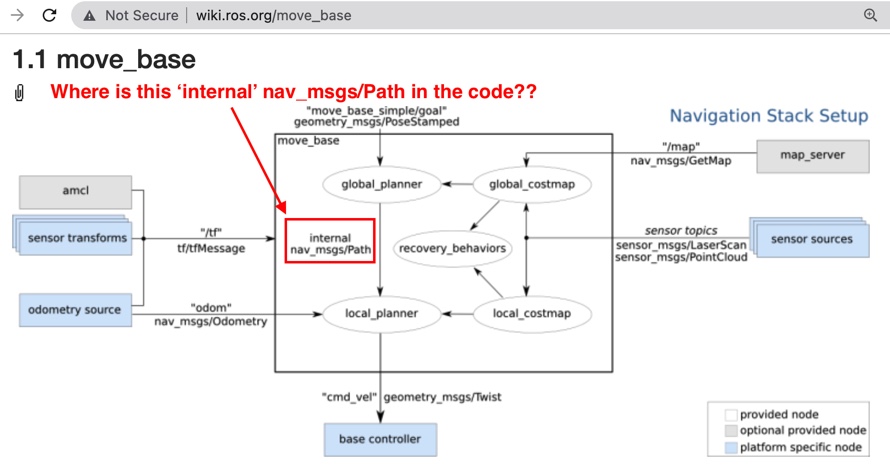
| 2023-06-21 18:54:40 -0500 | marked best answer | Sending my own path to ROS Navigation stack, Where can I locate the 'internal' nav_msgs/Path in the code?
Does anyone know where I can find this 'internal' nav_msgs/Path in the code of the ROS Navigation stack? Is it move_base.cpp? navfn_node.cpp? trajectory_planner_ros.cpp? |
| 2023-06-21 18:54:40 -0500 | received badge | ● Scholar (source) |
| 2023-06-21 18:54:18 -0500 | received badge | ● Famous Question (source) |
| 2021-12-29 08:39:48 -0500 | received badge | ● Notable Question (source) |
| 2021-11-24 17:04:19 -0500 | received badge | ● Popular Question (source) |
| 2021-11-24 04:27:49 -0500 | asked a question | Sending my own path to ROS Navigation stack, Where can I locate the 'internal' nav_msgs/Path in the code? Sending my own path to ROS Navigation stack, Where can I locate the 'internal' nav_msgs/Path in the code? Does anyone |
| 2021-04-24 02:40:30 -0500 | received badge | ● Famous Question (source) |
| 2021-01-08 02:27:01 -0500 | received badge | ● Notable Question (source) |
| 2021-01-08 02:27:01 -0500 | received badge | ● Popular Question (source) |
| 2020-08-12 04:53:13 -0500 | commented answer | Complete coverage path planning ros Unfortunately I think the heatmap package can only plan for coverage path for a polygon defined by rviz's publish_point |
| 2020-08-12 04:51:56 -0500 | commented answer | Complete coverage path planning ros Hi @Stephen_Z, can I check you are able to release the source code? |
| 2020-08-12 04:47:46 -0500 | commented question | Path planning for sensor/tool coverage? Hi @lucasw, may I check if you can share your code or maybe documentations on how you implement the coverage planner? |
| 2020-08-12 04:44:20 -0500 | commented question | Robot Coverage Path Planning Hi @RoSPlebb, may I check if you manage to implement the complete coverage program? I have tried the heatmap package but |
| 2020-08-12 04:38:46 -0500 | commented answer | Full coverage path planner Yeap it works but unfortunately it is only used to generate coverage way points of a geometry polygon drawn by using pub |
| 2020-08-11 21:47:32 -0500 | received badge | ● Citizen Patrol (source) |
| 2020-08-11 01:04:54 -0500 | commented question | Coverage path planning for the enviroment with moving obstacle Maybe you can try this http://wiki.ros.org/heatmap |
| 2020-07-29 23:14:15 -0500 | commented answer | How to change size of the inflation in move_base costmap? Yeah!! Thanks! The change happens after I restart ros master! Thanks! |
| 2020-07-29 02:09:49 -0500 | commented answer | hectorslam + navigation stack : obstacle inflation problem @StewartHemm74 Nope, Hector_mapping cannot be used to explore/navigate an unknown map on its own. You might want to look |
| 2020-07-20 03:59:45 -0500 | commented question | Hector Exploration Slow? Hi @jackianchow, I am also facing the same issue of slow path planning and strangely larger percentage of frontier cells |
| 2020-07-20 03:37:06 -0500 | answered a question | Hector_slam and hector_navigation implemented together Hi @Edcherie, you can take a look at this post https://answers.ros.org/question/173780/give-manual-goal-to-hector-explor |
| 2020-07-20 03:32:23 -0500 | answered a question | Hector Exploration Launch file Hi Rayner, you can take a look at this. https://answers.ros.org/question/112576/how-can-i-run-hector-navigation-for-expl |
| 2020-07-20 00:30:29 -0500 | commented answer | Problem with Hector Navigation Hi @jeremy33 , I have adjusted parameters like tolerance_trans, tolerance_rot, k_trans and k_rot the path following moti |
| 2020-07-20 00:30:29 -0500 | received badge | ● Commentator |
| 2020-07-17 03:27:51 -0500 | commented answer | Hector Exploration Slow? @jackianchow Hi Jackian, I have the similar problem as well with very high percentage of frontier cells ~99%, may I ask |
| 2020-07-16 20:56:03 -0500 | commented question | can i detect obstacles with hector_costmap with only laser scanner? Hi Basak, may I ask if you managed to hector_costmap for detecting obstacles using just laser data? |
| 2020-07-16 05:06:31 -0500 | commented question | Strange movement with hector_navigation Hi @ford_prefect , I am also having the same exact problem, may I check if you managed to solve this problem? |
| 2020-07-15 02:52:02 -0500 | commented question | How can I use hector_costmap to detect obstacles? Hi, may I asked did you found the solution to this? |
| 2020-07-15 02:40:59 -0500 | commented question | Strange movement with hector_navigation Hi, I have this issue as well. The robot doesn't follow the path! |
| 2020-07-12 22:58:23 -0500 | commented question | Autonomous navigation, am I missing something ? Hi @hamzh.albar@gmail.com "I run rostopic echo cmd_vel but I get zeros and values do not changes !" I have this issue a |
| 2020-07-12 22:58:12 -0500 | commented question | Autonomous navigation, am I missing something ? Hi @hamzh.albar@gmail.com "I run rostopic echo cmd_vel but I get zeros and values do not changes !" I have this issue a |
| 2020-07-12 22:57:59 -0500 | commented question | Autonomous navigation, am I missing something ? Hi @hamzh.albar@gmail.com "I run rostopic echo cmd_vel but I get zeros and values do not changes !" I have this issue a |
| 2020-07-12 22:57:47 -0500 | commented question | Autonomous navigation, am I missing something ? Hi @hamzh.albar@gmail.com "I run rostopic echo cmd_vel but I get zeros and values do not changes !" I have this issue a |
| 2020-07-08 01:43:49 -0500 | answered a question | hector_navigation on ROS Kinetic Hi, I have found this Pull Request that claimed to solve compilation error on Kinetic https://github.com/tu-darmstadt-ro |
| 2020-07-08 01:42:59 -0500 | answered a question | Can I perform Hector Navigation using ROS kinetic? Hi, I have found this Pull Request that claimed to solve compilation error on Kinetic https://github.com/tu-darmstadt-ro |
| 2020-07-06 21:16:10 -0500 | edited answer | Hector slam incremental mapping You can look in to Jin-W-FS's Pull Request at https://github.com/tu-darmstadt-ros-pkg/hector_slam/pull/45 I am also cur |
| 2020-07-06 21:12:57 -0500 | answered a question | Hector slam incremental mapping You can look in to Jin-W-FS's Pull Request at https://github.com/tu-darmstadt-ros-pkg/hector_slam/pull/45 I am also cur |
| 2020-06-26 03:53:18 -0500 | received badge | ● Enthusiast |
| 2020-06-14 21:34:11 -0500 | commented answer | hector_slam: how to load a saved map (and perform localization) Hi, may I check if anyone has implemented this (localization only) on Hector SLAM? |
| 2020-06-14 21:16:17 -0500 | received badge | ● Supporter (source) |
| 2020-06-08 06:16:49 -0500 | asked a question | Anyone knows how to make Hector SLAM take in Pre Built Static Map and perform Localization without mapping (Replacing AMCL)? Anyone knows how to make Hector SLAM take in Pre Built Static Map and perform Localization without mapping (Replacing AM |
| 2020-06-08 06:16:48 -0500 | commented question | hector_slam: how to load a saved map (and perform localization) Does anyone have any updates? |
| 2020-06-08 06:16:48 -0500 | commented question | hector localization package against known map Anyone got any updates on this? |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.