The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-08-19 14:56:24 -0500 | received badge | ● Famous Question (source) |
| 2022-06-06 22:51:45 -0500 | received badge | ● Famous Question (source) |
| 2022-04-06 10:20:51 -0500 | received badge | ● Famous Question (source) |
| 2022-03-08 06:54:09 -0500 | received badge | ● Notable Question (source) |
| 2021-10-01 08:14:08 -0500 | received badge | ● Famous Question (source) |
| 2021-07-07 01:33:27 -0500 | received badge | ● Famous Question (source) |
| 2021-05-17 04:30:33 -0500 | received badge | ● Notable Question (source) |
| 2021-04-23 08:51:25 -0500 | received badge | ● Famous Question (source) |
| 2021-02-08 12:31:03 -0500 | received badge | ● Notable Question (source) |
| 2020-12-03 01:04:29 -0500 | received badge | ● Notable Question (source) |
| 2020-12-02 04:17:01 -0500 | received badge | ● Famous Question (source) |
| 2020-11-16 17:22:17 -0500 | received badge | ● Notable Question (source) |
| 2020-11-11 13:49:29 -0500 | received badge | ● Notable Question (source) |
| 2020-10-27 11:51:10 -0500 | received badge | ● Famous Question (source) |
| 2020-09-23 07:34:00 -0500 | received badge | ● Notable Question (source) |
| 2020-09-23 06:29:03 -0500 | received badge | ● Popular Question (source) |
| 2020-09-22 10:54:22 -0500 | received badge | ● Famous Question (source) |
| 2020-09-19 03:17:16 -0500 | received badge | ● Popular Question (source) |
| 2020-09-18 08:49:48 -0500 | asked a question | video streaming with ROS2 video streaming with ROS2 Is there anything that allows ROS2 nodes to send & receive video streams from each others |
| 2020-08-24 07:57:21 -0500 | asked a question | ROS2 bandwidth on same subnet ROS2 bandwidth on same subnet My question might be a bit stupid. The state is: - 3 devices within the same subnet 192. |
| 2020-08-22 19:46:35 -0500 | received badge | ● Popular Question (source) |
| 2020-08-19 06:38:25 -0500 | asked a question | How does ROS2 handle several routes to the same destination How does ROS2 handle several routes to the same destination Basically our problem is having ROS2 communication over 2 ro |
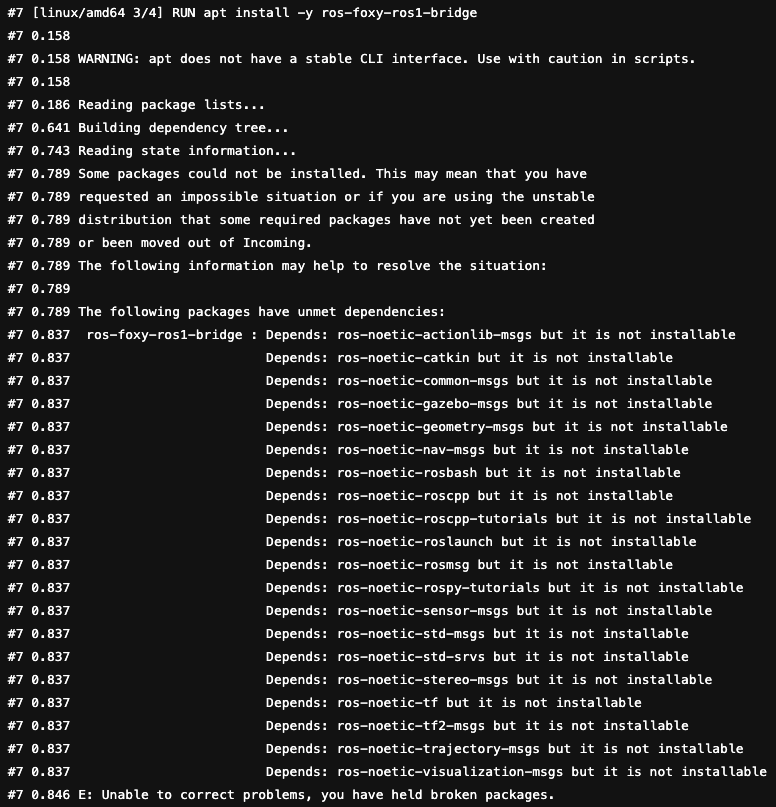
| 2020-08-16 12:44:43 -0500 | marked best answer | Install Ros1-Bridge on Foxy is Failing
Edit: text version of the error log: |
| 2020-08-10 05:29:58 -0500 | received badge | ● Popular Question (source) |
| 2020-08-10 05:29:53 -0500 | received badge | ● Popular Question (source) |
| 2020-07-30 08:37:12 -0500 | commented answer | ROS2 transfer the same message on the same topic without redundancy @tfoote @ivanpauno https://answers.ros.org/question/358361/fastrtps-communication-over-other-network/ |
| 2020-07-30 08:37:12 -0500 | received badge | ● Commentator |
| 2020-07-30 08:20:45 -0500 | edited question | FastRTPS communication over other network FastRTPS discovery over other network Say I have 2 networks and their corresponding ROS2 nodes inside: Network_A Nod |
| 2020-07-30 08:14:41 -0500 | edited question | FastRTPS communication over other network FastRTPS discovery over other network Say I have 2 networks and their corresponding ROS2 nodes inside: Network_A Nod |
| 2020-07-30 08:13:32 -0500 | asked a question | FastRTPS communication over other network FastRTPS discovery over other network Say I have 2 networks and their corresponding ROS2 nodes inside: - Network_A - |
| 2020-07-27 02:56:30 -0500 | commented answer | ROS2 transfer the same message on the same topic without redundancy I haven't done anything with FastRTPS. I'm using the basic config that ROS2 provides. Also haven't created a FastRTPS ap |
| 2020-07-27 02:53:12 -0500 | commented answer | ROS2 transfer the same message on the same topic without redundancy I haven't done anything with FastRTPS. I'm using the basic config that ROS2 provides. Also haven't created a FastRTPS ap |
| 2020-07-27 02:51:09 -0500 | commented answer | ROS2 transfer the same message on the same topic without redundancy I haven't done anything with FastRTPS. I'm using the basic config that ROS2 provides. Also haven't created a FastRTPS ap |
| 2020-07-27 02:32:22 -0500 | commented answer | Roscore without peer to peer I was just wondering if it could be done easily. Would have been allowing me to test something quickly and give it a go. |
| 2020-07-27 02:22:38 -0500 | marked best answer | Roscore without peer to peer Hello, Might be an odd question. Is there a way for Roscore (i.e Master) to disable p2p and act as a server transmitting data back and forth instead of letting peers communicating between them directly or no ? |
| 2020-07-24 08:29:26 -0500 | received badge | ● Popular Question (source) |
| 2020-07-24 07:35:44 -0500 | received badge | ● Famous Question (source) |
| 2020-07-23 04:00:02 -0500 | edited question | Roscore without peer to peer Roscore without peer to peer Hello, Might be an odd question. Is there a way for Roscore (i.e Master) to disable p2p a |
| 2020-07-23 03:59:43 -0500 | edited question | Roscore without peer to peer Roscore without peer to peer Hello, Might be an odd question. Is there a way for Roscore (i.e Master) to disable p2p a |
| 2020-07-23 03:52:29 -0500 | edited question | Roscore without peer to peer Roscore without peer to peer Hello, Might be an odd question. Is there a way for Roscore (i.e Master) to disable p2p a |
| 2020-07-23 03:52:11 -0500 | asked a question | Roscore without peer to peer Roscore without peer to peer Hello, Is there a way for Roscore (i.e Master) to disable p2p and act as a server transmit |
| 2020-07-23 01:16:45 -0500 | commented answer | ROS2 transfer the same message on the same topic without redundancy Hey @tfoote, thanks for your comment. Having 2 different topics, means that if X Node republish the msg received then t |
| 2020-07-22 16:35:41 -0500 | received badge | ● Notable Question (source) |
| 2020-07-22 11:42:37 -0500 | edited question | ROS2 transfer the same message on the same topic without redundancy ROS2 transfer the same message on the same topic without redondance On Node_1, I'm publishing to /telemetry. On Node_2, |
| 2020-07-22 09:40:53 -0500 | received badge | ● Popular Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.