The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2018-12-05 20:35:08 -0500 | received badge | ● Favorite Question (source) |
| 2017-04-18 08:18:47 -0500 | received badge | ● Good Question (source) |
| 2017-01-24 10:00:39 -0500 | received badge | ● Famous Question (source) |
| 2016-08-09 19:27:48 -0500 | received badge | ● Notable Question (source) |
| 2016-08-03 08:48:06 -0500 | received badge | ● Popular Question (source) |
| 2016-08-02 17:11:24 -0500 | commented answer | Rosbag record dropping and corrupting data Thank you for outlining the possibilities. I'll start with your suggestion to view the images separately and then cross-check each possibility. I'll update you once I'm done with that. Do you have any suggestion/possible explanation for the drop in Velodyne frames? Thanks! |
| 2016-08-02 15:39:10 -0500 | commented question | Rosbag record dropping and corrupting data it's very unlikely that the error is in the camera drivers as I'm using widely used pointgrey camera drivers without any modification. Yes, I see the issue in the Rviz window while the bagfile is recording. However, I'm yet to see this issue when the bagfile is not being recorded. |
| 2016-08-02 14:43:32 -0500 | asked a question | Rosbag record dropping and corrupting data Hello, I'm trying to store selected topics being published from various sensors sources (velodyne, monocular camera, IMUs) in a large bag file. I'm able to record the bagfile without seeing any errors. However, when I play back the file, I'm seeing the following errors:
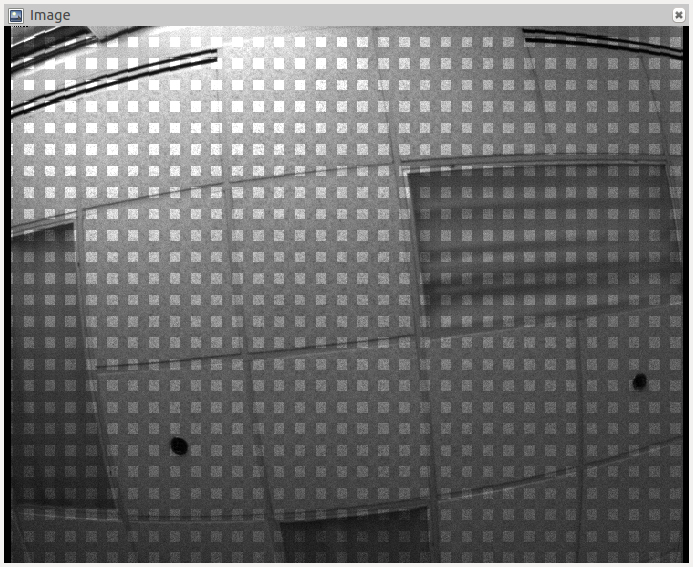
Original Image:
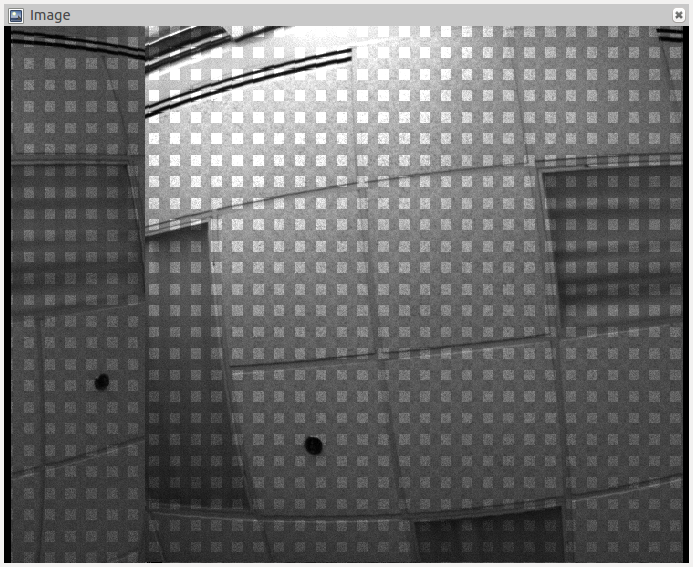
Corrupted Image
A few details about my setup:
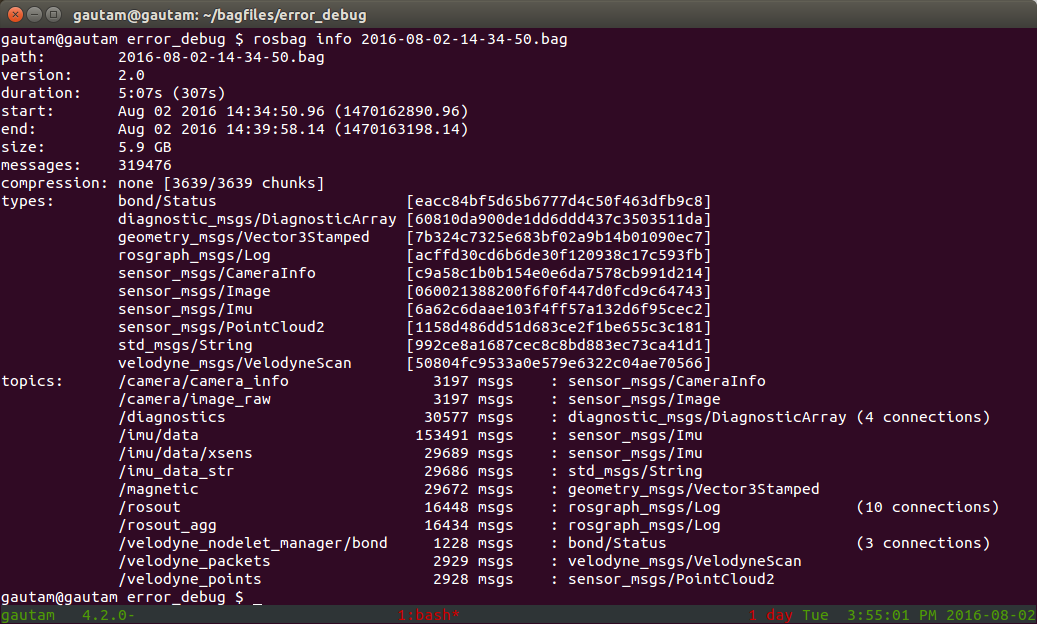
Rosbag info:
I will be happy to provide any relevant info that may be required. Thanks in advance! |
| 2015-08-31 17:05:43 -0500 | received badge | ● Nice Question (source) |
| 2015-08-31 17:05:32 -0500 | marked best answer | Autonomous navigation using navigation stack and hector slam Hello, I am trying to perform autonomous navigation using hector slam and the navigation stack, something similar to this ( www.youtube.com/watch?v=5V-0Y43i0h8 ) or ( www.youtube.com/watch?v=RPaa8ZsO0rk ) . I have already seen this post ( answers.ros.org/question/59153/how-to-extract-information-from-hector-slam-for-autonomous-navigation/ ) but instead of working with a pre stored map I want the map to be generated using hector_mapping and simultaneously I am able to perform navigation, that to without using the robot's odometry. I got hector slam working with hokuyo laser and was able to do mapping using just the laser. So my doubts are:
I will be happy to provide any relevant info that may be required and I'm sorry for not publishing actual links as my karma is not enough. Thank you for your time.. |
| 2015-08-09 13:23:31 -0500 | received badge | ● Student (source) |
| 2015-03-06 05:09:39 -0500 | commented answer | How to instruct a robot to cover the whole mapped 2D area? On the wiki page, I see the sentence "To run an unbounded exploration task, simply leave the boundary blank". I'm not sure how exactly should I do this? The same question is asked here |
| 2015-03-06 05:08:32 -0500 | commented answer | How to instruct a robot to cover the whole mapped 2D area? Does the frontier_exploration package provide complete map coverage? I have implemented it and once the region within the set boundaries is explored, the robot stops. Is there any way of using this package to make the robot move to every cell in the set boundary? |
| 2015-03-06 00:02:15 -0500 | commented answer | Full coverage path planner The same question has been asked here so I am not posting a new question. Can you please explain how to give the goal with an empty polygon? By unbounded search do you mean the total map coverage? |
| 2015-03-05 23:58:15 -0500 | received badge | ● Commentator |
| 2015-03-05 23:58:15 -0500 | commented answer | How to instruct a robot to cover the whole mapped 2D area? Hi Sobot, I am trying to achieve something similar but with hector slam and ROS navigation stack. Were you successful in running it? Thanks! |
| 2015-03-05 17:04:21 -0500 | commented question | how to divide a map (pgm) in little cell Hey, I am working on a similar problem, were you able to get it running? |
| 2015-03-05 14:15:41 -0500 | commented question | Path planning for sensor/tool coverage? Hey Lucas, I am working on a similar application. However, still could not get it running. Did you make any progress? |
| 2015-02-22 16:52:45 -0500 | commented answer | Full coverage path planner So was anyone able to figure out how to cover the complete map and not just part of the map as done in exploration? |
| 2014-12-02 01:46:52 -0500 | received badge | ● Teacher (source) |
| 2014-12-02 01:46:52 -0500 | received badge | ● Necromancer (source) |
| 2014-06-25 05:06:35 -0500 | answered a question | how do i download naoqi-sdk-1.12.3-linux32? And if you are not registered on the Aldebaran community, you can still download it from here: http://robocup.bowdoin.edu/public/sof... |
| 2014-05-25 21:18:39 -0500 | received badge | ● Scholar (source) |
| 2014-05-20 20:56:31 -0500 | received badge | ● Enthusiast |
| 2014-01-28 17:31:41 -0500 | marked best answer | error while running roboearth on groovy So I am trying to run roboearth_stack on ros-groovy, ubuntu 12.04 lts machine without much success. Though I have tried it earlier on fuerte and it works perfectly, I am not too sure if its possible to run it on groovy. Has anyone tried it yet? This is the output of rosmake roboearth: [rosmake-1] Starting >>> opencv2 [ make ] |
| 2013-11-26 18:05:09 -0500 | commented question | Having problems with TOD object detection I am also getting a similar output. I am using kinect sensor, groovy, 64 bit. Did you find any solution? |
| 2013-09-03 15:47:22 -0500 | commented answer | error while running roboearth on groovy Thank you for your reply and for addressing the problem of roboearth with groovy. I will try to follow your solution and then discuss further. |
| 2013-09-03 03:19:25 -0500 | received badge | ● Famous Question (source) |
| 2013-08-22 19:20:52 -0500 | received badge | ● Notable Question (source) |
| 2013-08-19 19:36:17 -0500 | received badge | ● Popular Question (source) |
| 2013-08-19 15:54:50 -0500 | received badge | ● Famous Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.