
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2014-09-12 09:53:20 -0500 | received badge | ● Guru (source) |
| 2014-09-12 09:53:20 -0500 | received badge | ● Great Answer (source) |
| 2014-01-28 17:25:21 -0500 | marked best answer | pr2_teleop_booth moved to pr2_teleop_general I had a hard time finding the pr2_teleop_booth package, so I'm just putting it in here hopefully to save others some time. Where did the pr2_teleop_booth package move to? |
| 2014-01-28 17:25:14 -0500 | marked best answer | fuerte machine tag changes rep 124 describes the changes made in the machine tag syntax in the ROS fuerte release [1], and states: The env-loader file must be an executable script that accepts variable-length arguments. After performing environment setup, the script must then execute its arguments as a command. ROS installations come with a default environment loader file. Can someone give an example of how such a script would typically look like? |
| 2014-01-28 17:25:14 -0500 | marked best answer | fuerte packages trying to link with mysqlclient Trying out the ROS fuerte release, various packages I try to build (e.g. gazebo_plugins) fail due to cmake trying to link with mysqlclient?! AFAIK it shouldn't link with those libraries at all?! How can I find out where the mysql dependency / link flags are introduced? |
| 2014-01-28 17:25:13 -0500 | marked best answer | ROS fuerte ros/package.h not found I'm trying out the ROS fuerte beta release, and in one of my packages the file <ros package.h=""> is included, which it now refuses to find fatal error: ros/package.h: No such file or directory compilation terminated. What dependency (ros/system) do I have to add to successfully compile my program? |
| 2014-01-28 17:22:56 -0500 | marked best answer | xdot URL feature I'm using xdot to build my own custom graphs by reading out a file containing dot syntax. The XDot page http://code.google.com/p/jrfonseca/wiki/XDot#Embedding mentions the feature of adding the URL tag to nodes to display information when clicked. I tried to add it to my dot file without success. Can I use this feature in the xdot ROS package? If so, an example is appreciated. |
| 2014-01-28 17:22:48 -0500 | marked best answer | flyer_sim package I was looking for a quadrotor simulator, and found the starmac flyer_sim package on the ROS wiki http://www.ros.org/wiki/flyer_sim The linked repo however does not contain the flyer_sim package any more. Also the starmac_flyer stack does not list it any longer. What happened to the flyer_sim package? |
| 2014-01-28 17:22:04 -0500 | marked best answer | roslaunch using find packages on different machines looks for packages on local machine I'm using roslaunch a lot to spawn different nodes on different machines I'm working on. Doing this using the launch syntax together with the machine tag works fine. However, I just found out that when using the $(find PkgName) syntax in a node which is spawned on a remote machine, ros actually starts looking for the package on my local laptop. I expected it to do that search on the remote machine however. Is this known (expected) behaviour or should I file a bug report for it? |
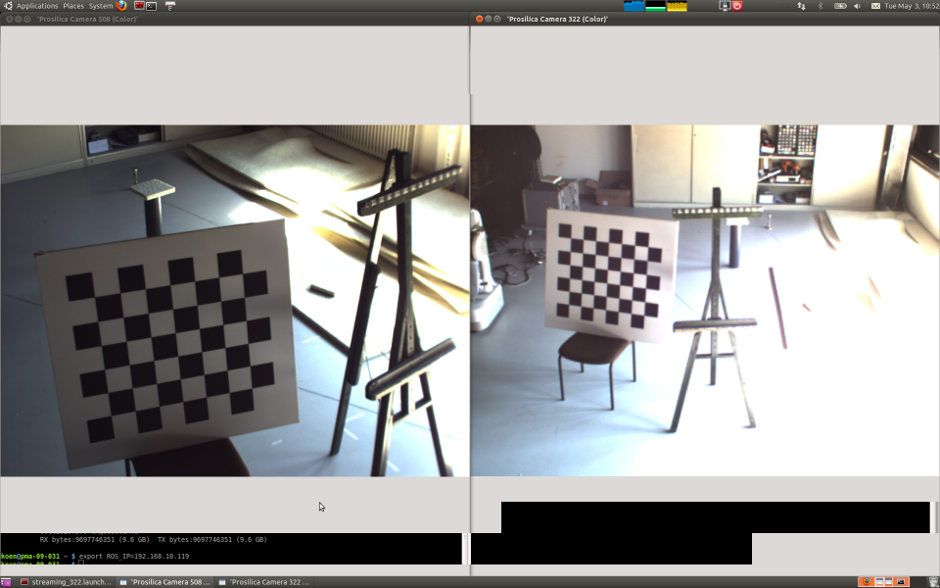
| 2014-01-28 17:22:02 -0500 | marked best answer | Camera pose calibration with multiple camera's Hi, we're using the camera_pose_calibration package and try to calibrate multiple camera's with it. We followed the instructions at http://www.ros.org/wiki/camera_pose_c... - which went well. The camera nodes are started, the images appear properly in the calibration gui, but we have trouble detecting the checkerboard pattern. Although the pattern appears, clearly visible and sharp, in both images, no corners are detected (see screenshot attached C:\fakepath\Screenshot-13.png). We tried this with 2 kinect camera's at first, and with 2 prosilica Gige camera's afterwards (we thought image quality might matter here, but it's no different). We tested with both mono and color images. Any suggestions / comments on how to check what is going wrong here? |
| 2014-01-28 17:21:38 -0500 | marked best answer | rxplot for vector like types Hi, trying to plot some fields from a vector-like ROS message, I can't find the right syntax to do so. I have a ROSmsg 'DataMsg' which contains:
And a message on top of that DataMsgs, which has:
How do I plot the data inside e.g. DataMsgs/data[0]/data[0] with rxplot? I tried various lines, but noone of them worked so far... regards, Steven |
| 2014-01-28 17:21:37 -0500 | marked best answer | Pelican pose control accuracy Hi, This question mainly to all those ROS UAV users working with an Asctec Pelican quadrotor: what's the typical hovering accuracy you can obtain? I got a first basic controller working but, before I start trying to optimize is, would like to have an idea of the typical performance I can achieve. regards, Steven |
| 2013-12-15 23:51:09 -0500 | received badge | ● Taxonomist |
| 2013-11-06 11:20:47 -0500 | marked best answer | pelican model in gazebo I'm trying out Gazebo to (maybe) build a quadrotor simulator and started with the pelican urdf model in the asctec_drivers stack. I manage to spawn the pelican.xml file in gazebo, but no model of the actual quadrotor is shown. Has anyone succesfully used this model in Gazebo already? If so, could you explain me how to use it? |
| 2013-08-02 11:38:33 -0500 | marked best answer | Vicon motion capturing: which ROS package is the best Hi all, we're planning on using a Vicon motion capturing system and want to use one of the available ROS packages to interface it. Using the ROS wiki, I already found 3 different implementations:
Is this list complete or are there other implementations which I didn't find? Is there any reason for me to choose one of those in particular? Are they all offering the same interfacing? Regards |
| 2013-06-18 05:57:51 -0500 | received badge | ● Popular Question (source) |
| 2013-06-18 05:57:51 -0500 | received badge | ● Notable Question (source) |
| 2013-06-18 05:57:51 -0500 | received badge | ● Famous Question (source) |
| 2013-04-23 12:51:55 -0500 | received badge | ● Popular Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
{kind=link}