The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2020-07-20 14:12:11 -0500 | received badge | ● Necromancer (source) |
| 2019-08-19 20:15:20 -0500 | received badge | ● Famous Question (source) |
| 2019-08-19 20:15:20 -0500 | received badge | ● Notable Question (source) |
| 2019-08-19 20:15:20 -0500 | received badge | ● Popular Question (source) |
| 2019-06-08 00:44:10 -0500 | received badge | ● Great Question (source) |
| 2018-05-06 05:26:28 -0500 | received badge | ● Popular Question (source) |
| 2018-05-05 21:38:32 -0500 | commented question | ROS Communication segfault issue with python thanks for the comments @gvdhoorn! I did try to use debug with gdb by following this tutorial but I didn't get useful |
| 2018-05-05 21:38:13 -0500 | commented question | ROS Communication segfault issue with python I agree with you that observing tcpros being mentioned many times does not mean it is the cause of the problem. now I am |
| 2018-05-05 21:33:51 -0500 | commented question | ROS Communication segfault issue with python thanks for the comments @gvdhoorn! I did try to use debug with gdg by following this tutorial but I didn't get useful |
| 2018-05-05 00:14:55 -0500 | received badge | ● Enthusiast |
| 2018-05-04 22:49:56 -0500 | edited question | ROS Communication segfault issue with python ROS Communication segfault issue with python Hi ROS community, Recently I encountered a very weird segfault with ros co |
| 2018-05-04 22:30:15 -0500 | asked a question | ROS Communication segfault issue with python ROS Communication segfault issue with python Hi ROS community, Recently I encountered a very weird segfault with ros co |
| 2017-01-27 06:26:26 -0500 | received badge | ● Famous Question (source) |
| 2016-05-26 08:35:40 -0500 | received badge | ● Good Question (source) |
| 2016-04-15 01:56:43 -0500 | received badge | ● Notable Question (source) |
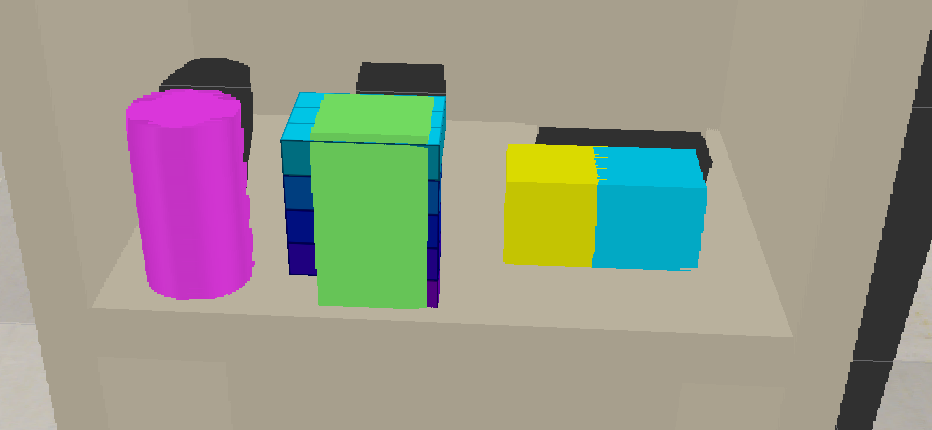
| 2015-10-09 04:16:03 -0500 | asked a question | octomap server problem: MarkerArray doesn't enclose all point clouds Hi , I am trying to use octomap server to build occupancy grid for my environment and objects. This is the raw point cloud from simulator:
after segmentation and call octomap service to build the map,
below is the MarkerArray in visualization for the middle object:
As you can see, the occupancy grids are not completely enclosing the point cloud, and I understand that the generated occupancy grid depends on the actual pose of object due to the fixed resolution of the grid. But for my purpose, I want to full enclosure no matter where the object is located. So is there a way or is there some parameter in octomap I can play with to achieve that purpose? Thank you so much in advance! |
| 2015-09-09 22:43:27 -0500 | commented answer | ROS and PCL conversion issue using stereo camera I encountered the same problem, thanks a lot for the workable solution! |
| 2015-08-02 13:25:56 -0500 | received badge | ● Popular Question (source) |
| 2015-07-29 17:01:38 -0500 | received badge | ● Nice Question (source) |
| 2015-07-22 05:33:57 -0500 | commented answer | Which planning scene does Moveit! use to plan a collision-free path? Thank you so much for the answer, Dornhege! |
| 2015-07-22 02:51:12 -0500 | asked a question | Which planning scene does Moveit! use to plan a collision-free path? Dear Community, I am able to visualize the occupancy grid in rviz after launching moveit with a kinect. There are two topics for the planning scene: 1. monitored_planning_scene: this one is updated if the env changes in real time 2. planning_scene: this one is kind of static I want to know when using moveit! to perform collision-free path planning, eg. plan2 = group.plan() python api Is the path planned against the monitored_planning_scene, which will reflect the current env or against planning_scene which is the first sight of the env when moveit! is launched? Thank you so much for your help in advance! |
| 2014-12-27 12:23:02 -0500 | received badge | ● Self-Learner (source) |
| 2014-12-27 12:23:02 -0500 | received badge | ● Teacher (source) |
| 2014-12-14 03:08:18 -0500 | received badge | ● Famous Question (source) |
| 2014-11-23 03:31:39 -0500 | received badge | ● Famous Question (source) |
| 2014-05-28 03:21:24 -0500 | received badge | ● Famous Question (source) |
| 2014-04-30 08:50:09 -0500 | received badge | ● Notable Question (source) |
| 2014-04-20 06:57:10 -0500 | marked best answer | Ros topic published string cannot be captured Dear my friends, Recently, I have encountered the following problem. I want my ros node to publish a string message if other node is sending request for this message and I want to differentiate each message sent, which means for each request only one string is sent out: I use the following command to publish the string (python code) I also use But if I repeatedly send publish the same string using for loop (about 2000 loops), now I can see the message on the screen, but this is not what i want, I just want to publish once not multiple times. I guess the issue here is due to the communication latency of ros? Any help and suggestions are much much appreciated!!! Juekun |
| 2014-04-20 06:55:36 -0500 | marked best answer | PR2 arm planning is not shown in Gazebo Hi my friends, I have a problem following the tutorial on Moveit! here I follow exactly what the tutorial says, the pr2 can plan an arm trajectory and show the animation in Rviz, however when i click the Execute button on the Motion Planning panel, the pr2 in gazebo does nothing. The error message i received from rviz is as follows: But i am sure i also follow the tutorial here to setup the configurations. Can someone help to solve the problem. I am running on groovy Ubuntu 12.04LTS. Thanks a lot in advance! |
| 2014-04-20 06:55:29 -0500 | marked best answer | point_cloud cmake problem: cannot specify link libraries for target Hi my friends, I am using ros-fuerte on 12.04. I am trying to compile the example from http://correll.cs.colorado.edu/?p=2807 which runs on ros-groovy. I have created my own CMakeLists.txt in order to make, however i encountered the following problem after running "make": The CMakeLists.txt is : I think the problem will be editing target_link_libraries, but i do not know which library to add and how to add it. Could someone help to give some instructions? Thanks a lot in advance! |
| 2014-04-20 06:55:25 -0500 | marked best answer | How to playback pointcloud in rviz which was recorded using rosbag Hi my friends, I am quite new to ROS and pointcloud. I am running some experiments with pointcloud using kinect. after running |
| 2014-03-25 21:12:28 -0500 | received badge | ● Popular Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.