
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2016-12-13 06:47:49 -0500 | received badge | ● Famous Question (source) |
| 2016-08-19 07:24:15 -0500 | received badge | ● Student (source) |
| 2016-08-19 05:13:49 -0500 | received badge | ● Famous Question (source) |
| 2016-04-18 04:59:37 -0500 | received badge | ● Notable Question (source) |
| 2016-04-18 04:59:37 -0500 | received badge | ● Popular Question (source) |
| 2015-09-21 22:45:03 -0500 | received badge | ● Notable Question (source) |
| 2015-09-21 22:45:03 -0500 | received badge | ● Popular Question (source) |
| 2015-09-12 15:16:45 -0500 | asked a question | Empty transforms using Robot State Publisher Hi guys, I'm trying to broadcast moving joint states using my robot state publisher. I echoed the topic on which I broadcast my state, all I get is : Here's my code section responsible for broadcasting the state : When I use publishFixedTransform("") instead of publishTransforms, I get my transforms correctly published to the topic, but I cannot move them since I use a KDL tree from an URDF file to create my robot model. Do you guys have any tip of what I'm doing wrong ? Thanks ! |
| 2015-08-05 15:01:11 -0500 | commented question | How to save rViz joint position in bag file How would you "connect" the frame to the joint ? Is there a way to do it using rospy or roscpp ? I also though about adding this feature into a local rViz version on my machine but recompiling the whole things seems a bit overkill for what I want to do... |
| 2015-08-05 13:20:02 -0500 | commented question | How to save rViz joint position in bag file What I'm seeing now is that rViz doesn't publish the joint_4 position to a topic and doesn't offer a service to get said values. So I don't think I can use rosbag and/or rqt_plot... but if there's another way to use them I don't know it. |
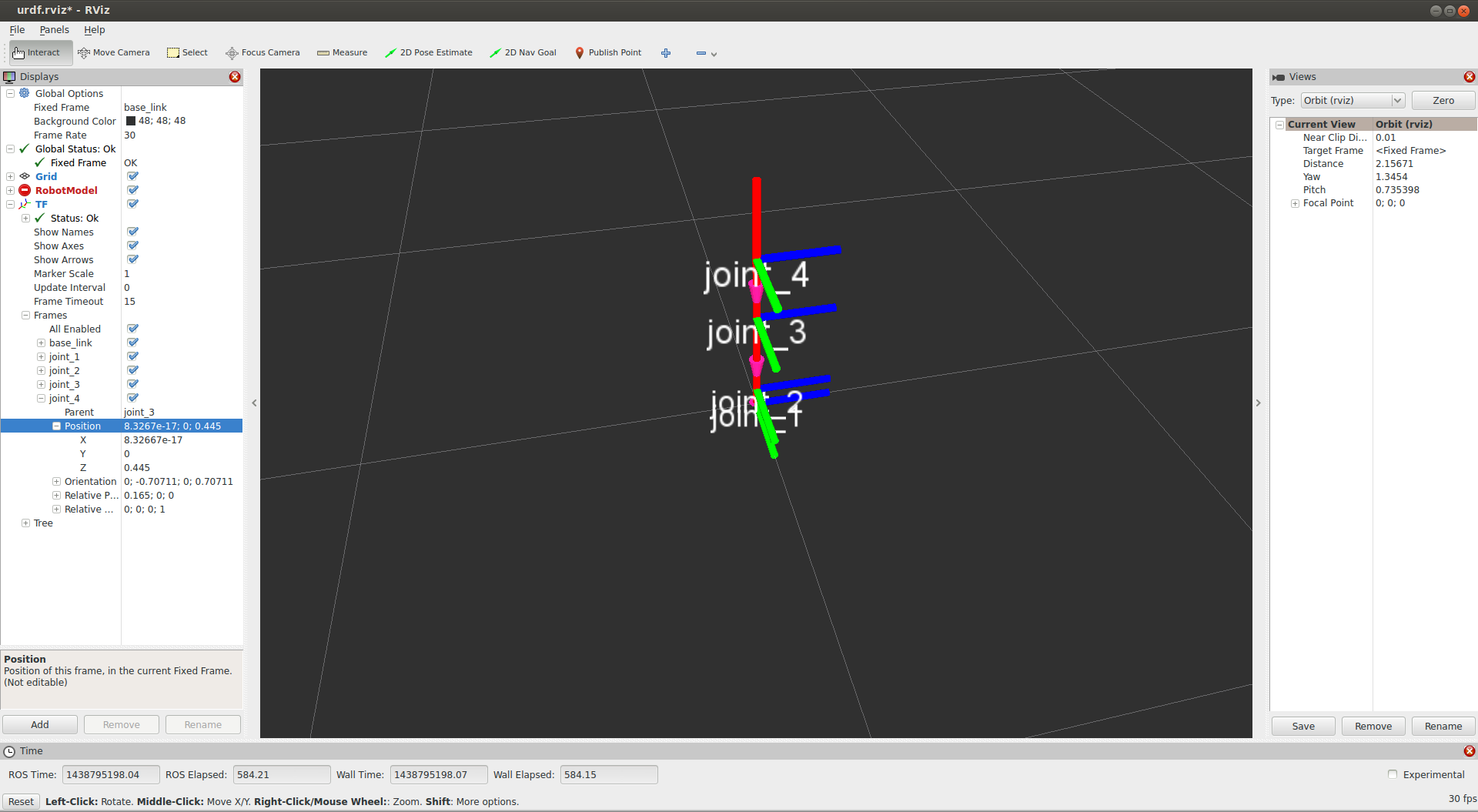
| 2015-08-05 12:23:22 -0500 | asked a question | How to save rViz joint position in bag file Hi guys, I'm trying to calculate by hand the kinematics of a simple 3-DOF manipulator and I want to automate my kinematics testing by using rViz with a transform publisher. Here's a screenshot of my rViz workspace C:\fakepath\Screenshot from 2015-08-05 13:19:58.png I just want to log the X,Y,Z position of the joint_4 (see in the left panel in the screenshot) Is it possible ? Thanks ! |
| 2015-07-09 09:43:34 -0500 | received badge | ● Famous Question (source) |
| 2015-06-05 09:52:38 -0500 | received badge | ● Famous Question (source) |
| 2014-10-27 14:05:57 -0500 | received badge | ● Notable Question (source) |
| 2014-10-27 13:16:07 -0500 | commented answer | C++ undefined reference on constructor I will look into that ! Thank you very much ! |
| 2014-10-27 13:15:07 -0500 | commented answer | C++ undefined reference on constructor It worked ! Thx ! |
| 2014-10-27 13:14:48 -0500 | received badge | ● Scholar (source) |
| 2014-10-27 07:26:54 -0500 | received badge | ● Popular Question (source) |
| 2014-10-26 21:12:23 -0500 | asked a question | C++ undefined reference on constructor I'm trying to catkin_make my ROS package and I always get this error : Since it's an "undefined reference" error, I checked the methods names for any typo but found none and I also checked my code files to be sure the correct header files we're included and everything seems fine. This is the node.cpp code : (The error happens when I try to create an object from the class SBGInsIg500N). The class is located in a folder called "sbg_ins" which is a sub folder of my src directory in my package. And this is the CMakeLists file : Calling catkin_make on my workspace outputs the error above, is there something I'm doing wrong ? |
| 2014-09-24 08:44:56 -0500 | received badge | ● Notable Question (source) |
| 2014-09-23 13:10:15 -0500 | received badge | ● Popular Question (source) |
| 2014-09-23 01:01:40 -0500 | edited question | Using rosjava nodes inside non-rosjava projects. Hi, I am trying to adapt an existing complex java application using a rosjava node. I succesfully included my rosjava test class "Listener.java" into my other java project so I can access the class and create an instance of the rosjava object. The problem happens here : This method is the onStart method of the auto-generated Listener.java class of my rosjava project. How could I access the ConnectedNode object from a non-rosjava class or method and pass it to the rosjava object in order to correctly use it. Or maybe there's another way around to adapt non rosjava projects ? Did you guys encounter the same problem as me ? I want to hear what you've done to solve this problem. Thank you very much ! |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
{kind=link}