The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
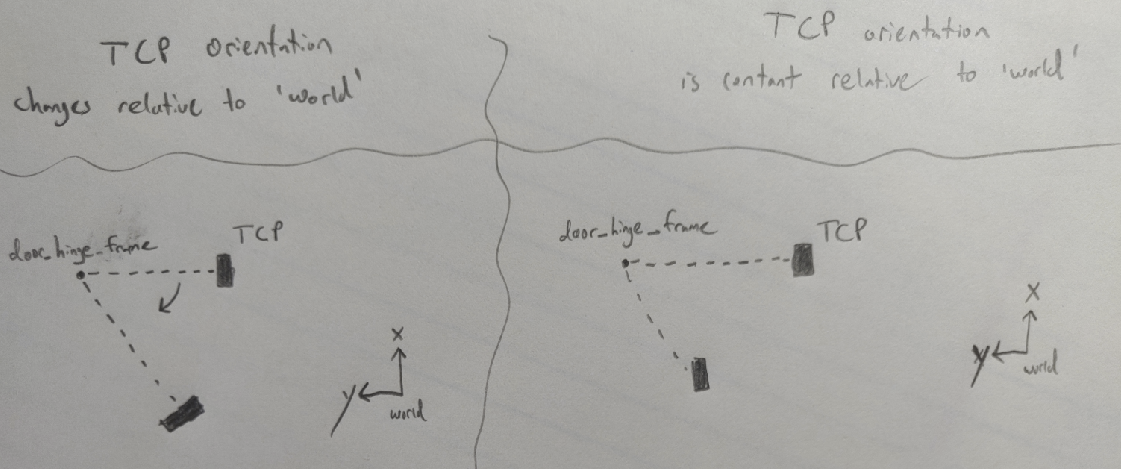
| 2023-07-02 04:43:51 -0500 | marked best answer | Using MTC to Plan a Circular Path Hi, I'm currently trying to use the ros2 branch of MTC (MoveIt Task Constructor) to plan a circular motion to open a door. I know that it's possible to use the So what I'm thinking of doing is adding a fixed frame in the robot URDF (let's call it the So a few questions:
Any help with answering these questions would be much appreciated! Note that I'm working in a Docker container running Ubuntu 20.04 and ROS Galactic (I've also seen this issue in a Docker container running Ubuntu 22.04 and ... (more) |
| 2023-07-02 04:35:52 -0500 | received badge | ● Nice Question (source) |
| 2023-03-06 13:50:02 -0500 | commented answer | Getting a Node::SharedPtr from "this" I realize this thread is old, but what is the reason you can still do this->create_publisher<std_msgs::msg::String |
| 2022-11-23 14:08:25 -0500 | commented answer | How to get an array of parameters with rclcpp I did not know that! Thanks! |
| 2022-11-23 13:35:07 -0500 | commented answer | How to get an array of parameters with rclcpp Ah, so when you do 'auto foo', is 'foo' of the std::vector<int64_t> type? Or is 'foo' of the rclcpp::Parameter typ |
| 2022-11-23 11:23:16 -0500 | commented answer | How to get an array of parameters with rclcpp This shows how to declare the parameter. But how would you get a param holding a vector using the 'get_parameter' syntax |
| 2022-11-21 11:06:55 -0500 | received badge | ● Famous Question (source) |
| 2022-11-21 11:06:55 -0500 | received badge | ● Notable Question (source) |
| 2022-11-02 17:05:05 -0500 | commented answer | ROS2 Image publisher slows down on subscription I've run into this issue as well, and have not figured out a way to solve it yet. Though in my case, even having two sub |
| 2022-08-13 22:24:50 -0500 | received badge | ● Famous Question (source) |
| 2022-08-12 14:24:54 -0500 | edited question | Using MTC to Plan a Circular Path Using MTC to Plan a Circular Path Hi, I'm currently trying to use the ros2 branch of MTC (MoveIt Task Constructor) to p |
| 2022-08-12 14:24:54 -0500 | received badge | ● Editor (source) |
| 2022-08-12 14:22:45 -0500 | edited question | Using MTC to Plan a Circular Path Using MTC to Plan a Circular Path Hi, I'm currently trying to use the ros2 branch of MTC (MoveIt Task Constructor) to p |
| 2022-08-02 22:17:57 -0500 | commented answer | ros2 foxy including header file from other package In the pkg cmake, wouldn't you also need to include... include_directories( ${temp_lib_INCLUDE_DIRS} ) ...before th |
| 2022-08-02 22:17:24 -0500 | commented answer | ros2 foxy including header file from other package In the pkg cmake, wouldn't you also need to include... ``` include_directories( ${temp_lib_INCLUDE_DIRS} ) ``` ... |
| 2022-08-02 22:17:14 -0500 | commented answer | ros2 foxy including header file from other package In the pkg cmake, wouldn't you also need to include... ``` include_directories( ${temp_lib_INCLUDE_DIRS} ) ``` ...be |
| 2022-08-02 22:16:52 -0500 | commented answer | ros2 foxy including header file from other package In the pkg cmake, wouldn't you also need to include... include_directories( ${temp_lib_INCLUDE_DIRS} ) ...before t |
| 2022-08-02 22:16:36 -0500 | commented answer | ros2 foxy including header file from other package In the pkg cmake, wouldn't you also need to include... include_directories( ${temp_lib_INCLUDE_DIRS} ) ...before the |
| 2022-08-02 21:47:42 -0500 | commented question | Cannot include tf2_geometry_msgs.h In ROS2 humble and potentially other distros, the header include has been changed to tf2_geometry_msgs/tf2_geometry_msgs |
| 2022-05-24 17:58:14 -0500 | received badge | ● Famous Question (source) |
| 2022-05-24 17:57:33 -0500 | received badge | ● Famous Question (source) |
| 2022-05-06 07:51:47 -0500 | received badge | ● Notable Question (source) |
| 2022-05-04 11:01:47 -0500 | received badge | ● Popular Question (source) |
| 2022-05-04 01:34:10 -0500 | received badge | ● Famous Question (source) |
| 2022-05-03 15:27:24 -0500 | asked a question | Using MTC to Plan a Circular Path Using MTC to Plan a Circular Path Hi, I'm currently trying to use the ros2 branch of MTC (MoveIt Task Constructor) to p |
| 2022-04-11 04:21:57 -0500 | received badge | ● Notable Question (source) |
| 2022-02-18 04:13:57 -0500 | received badge | ● Notable Question (source) |
| 2021-12-26 11:55:27 -0500 | received badge | ● Popular Question (source) |
| 2021-12-25 08:38:51 -0500 | received badge | ● Famous Question (source) |
| 2021-12-19 20:11:08 -0500 | marked best answer | Purpose of Forward Command Controller I recently stumbled across the It seems like there is some redundancy here, and according to the controller documentation, the above controllers even use the forward command controller behind the scenes. This question applies to both ros1 and ros2. |
| 2021-12-16 16:57:11 -0500 | asked a question | Purpose of Forward Command Controller Purpose of Forward Command Controller I recently stumbled across the forward_command_controller/ForwardCommandController |
| 2021-11-12 11:48:26 -0500 | marked best answer | [ROS2] Purpose of TextSubstitution In the ROS2 tutorials located at https://docs.ros.org/en/foxy/Tutorial..., the 'default_value' within the 'DeclareLaunchArgument' directive is assigned to My question is why that is necessary. Can't you just do Thanks |
| 2021-11-10 13:57:46 -0500 | received badge | ● Popular Question (source) |
| 2021-11-10 13:40:00 -0500 | commented answer | [ROS2] Purpose of TextSubstitution So if you're not planning on concatenating the LaunchArgument with something else - but just passing it to parameters wi |
| 2021-11-09 22:42:05 -0500 | asked a question | [ROS2] Purpose of TextSubstitution [ROS2] Purpose of TextSubstitution In the ROS2 tutorials located at https://docs.ros.org/en/foxy/Tutorials/Launch-Files/ |
| 2021-10-04 23:33:59 -0500 | commented answer | [ros2] Including a launch file in a launch file with parameter overrides Instead of calling them 'parameters', it would be better to call them launch file arguments. What I imagine the question |
| 2021-10-04 23:33:26 -0500 | commented answer | [ros2] Including a launch file in a launch file with parameter overrides Instead of calling them 'parameters', it would be better to call them launch file arguments. What I imagine the question |
| 2021-10-04 18:11:06 -0500 | commented answer | symbol lookup error in lib<PKG>__rosidl_typesupport_introspection_cpp.so: Ran into this exact issue today and following the solution from @trueckel solved it for me!! Thanks! |
| 2021-09-06 02:13:21 -0500 | received badge | ● Famous Question (source) |
| 2021-08-29 20:04:33 -0500 | received badge | ● Notable Question (source) |
| 2021-08-27 12:46:53 -0500 | received badge | ● Popular Question (source) |
| 2021-08-27 12:09:51 -0500 | commented answer | Subscription (ROS 2) vs Subscriber (ROS 1) I'm still not sure I understand the difference between the two. Shouldn't the same hold true by a ros 2 publisher? Inst |
| 2021-08-26 18:20:18 -0500 | asked a question | Subscription (ROS 2) vs Subscriber (ROS 1) ROS 2 Subscriber Naming This is really more of a conceptual question, but as I was going through the ROS 2 tutorials, I |
| 2021-08-16 05:08:59 -0500 | received badge | ● Popular Question (source) |
| 2021-07-27 04:24:16 -0500 | received badge | ● Notable Question (source) |
| 2021-07-26 16:49:41 -0500 | asked a question | Configuring an Image Pipeline Configuring an Image Pipeline Hi, I currently have a rosbag that contains... Raw Color Image topic Raw Color Image Ca |
| 2021-03-10 14:27:56 -0500 | commented answer | How do I disable execution_duration_monitoring ? This helped me too! I only scaled up the allowed_execution_duration_scaling parameter to 4. I left the 'execution_durati |
| 2021-03-03 08:10:14 -0500 | received badge | ● Student (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.