
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-06-14 07:32:05 -0500 | received badge | ● Famous Question (source) |
| 2021-08-31 08:27:31 -0500 | received badge | ● Famous Question (source) |
| 2021-07-22 12:25:15 -0500 | received badge | ● Notable Question (source) |
| 2021-07-16 10:01:41 -0500 | received badge | ● Famous Question (source) |
| 2021-07-13 12:20:54 -0500 | received badge | ● Famous Question (source) |
| 2021-05-19 10:45:38 -0500 | received badge | ● Notable Question (source) |
| 2021-03-27 09:41:04 -0500 | received badge | ● Notable Question (source) |
| 2021-03-06 05:46:26 -0500 | received badge | ● Notable Question (source) |
| 2021-02-23 15:45:49 -0500 | marked best answer | what difference does it make in NavStack(move_base) with frame_id as map vs odom We set global_frame for different nodes of the NavStack. Below are the ones I am eager to know about and how they affect the system. Costmap params: planner params: |
| 2021-02-23 15:45:45 -0500 | answered a question | what difference does it make in NavStack(move_base) with frame_id as map vs odom refer to the comments for answe. |
| 2021-02-22 17:45:51 -0500 | received badge | ● Popular Question (source) |
| 2021-01-14 16:26:35 -0500 | commented question | what difference does it make in NavStack(move_base) with frame_id as map vs odom Hi @skpro19, It totally makes sense now and even answers my question. So basically if we do not have a external grid_ma |
| 2021-01-14 16:26:28 -0500 | commented question | what difference does it make in NavStack(move_base) with frame_id as map vs odom Hi @skpro19, It totally makes sense now and even answers my question. So basically if we do not have a external grid_ma |
| 2021-01-14 16:26:07 -0500 | commented question | what difference does it make in NavStack(move_base) with frame_id as map vs odom Hi @skpro19, It totally makes sense now and even answers my question. So basically if we do not have a external grid_ma |
| 2021-01-14 16:23:09 -0500 | commented question | what difference does it make in NavStack(move_base) with frame_id as map vs odom Hi @skpro19 |
| 2021-01-14 15:48:05 -0500 | commented question | what difference does it make in NavStack(move_base) with frame_id as map vs odom Thanks for response @skpro19 . I load the map obtained from gmapping using map_server package. what do you mean by ex |
| 2021-01-14 15:47:31 -0500 | commented question | what difference does it make in NavStack(move_base) with frame_id as map vs odom @skpro19 Thanks for response. I load the map obtained from gmapping using map_server package. what do you mean by ext |
| 2021-01-14 15:03:39 -0500 | received badge | ● Nice Question (source) |
| 2021-01-11 22:21:37 -0500 | edited question | what difference does it make in NavStack(move_base) with frame_id as map vs odom what difference does it make in NavStack(move_base) with frame_id as map vs odom We set global_frame for different nodes |
| 2021-01-11 22:21:05 -0500 | edited question | what difference does it make in NavStack(move_base) with frame_id as map vs odom what difference does it make in NavStack(move_base) with frame_id as map vs odom We set global_frame for different nodes |
| 2021-01-11 22:20:46 -0500 | edited question | what difference does it make in NavStack(move_base) with frame_id as map vs odom what difference does it make in NavStack(move_base) with frame_id as map vs odom We set global_frame for different nodes |
| 2021-01-11 22:20:22 -0500 | asked a question | what difference does it make in NavStack(move_base) with frame_id as map vs odom what difference does it make in NavStack(move_base) with frame_id as map vs odom We set global_frame for different nodes |
| 2021-01-11 00:15:24 -0500 | commented question | SLAM_Toolbox: Localization offset when robot is not moving I have experienced this with amcl as well. |
| 2021-01-10 05:05:43 -0500 | commented question | 2D navigation with 3D map I think the question here is how do use NavStack's 2d path planning (NavFn or DWA) on 3d slam maps generated by cartogra |
| 2021-01-10 04:52:17 -0500 | commented answer | Navigation of mobile robot in 3d map Hi @M@t, Can you please suggest how to integrate 3D slam algorithms like cartographer or hdl_graph_slam with NavStack fo |
| 2020-12-15 07:03:49 -0500 | received badge | ● Popular Question (source) |
| 2020-11-23 20:20:16 -0500 | answered a question | gmapping : Scan Matching Failed, using odometry increase your max laser range, if most of the features/walls are outside maxRange param in the gmapping, then I get this |
| 2020-11-21 03:23:56 -0500 | commented answer | How to edit a map programmatically? @DesperateCookie I am working on the same problem. Is it possible for you to share your code? Thanks |
| 2020-11-20 23:34:02 -0500 | asked a question | how to link two different maps in slamtoolbox how to link two different maps in slamtoolbox Hello all, I am using slam toolbox for mapping an indoor warehouse and th |
| 2020-11-17 03:16:16 -0500 | received badge | ● Notable Question (source) |
| 2020-11-16 22:23:51 -0500 | edited question | good local planner/controllers for accurately following the global trajectory with obstacle avoidance good local planner/controllers for accurately following the global trajectory with obstacle avoidance [closed] For my ap |
| 2020-11-11 03:33:27 -0500 | received badge | ● Popular Question (source) |
| 2020-11-09 09:50:56 -0500 | received badge | ● Popular Question (source) |
| 2020-11-09 02:34:18 -0500 | received badge | ● Popular Question (source) |
| 2020-11-07 07:10:33 -0500 | asked a question | good local planner/controllers for accurately following the global trajectory with obstacle avoidance good local planner/controllers for accurately following the global trajectory with obstacle avoidance [closed] For my ap |
| 2020-11-07 06:45:06 -0500 | asked a question | good local planner/controllers for accurately following the global trajectory with obstacle avoidance good local planner/controllers for accurately following the global trajectory with obstacle avoidance For my application |
| 2020-11-07 06:35:52 -0500 | asked a question | what is the standard way to get the quality of the obtained pose from slam_toolbox? what is the standard way to get the quality of the obtained pose from slam_toolbox? How to get an accuracy metric of the |
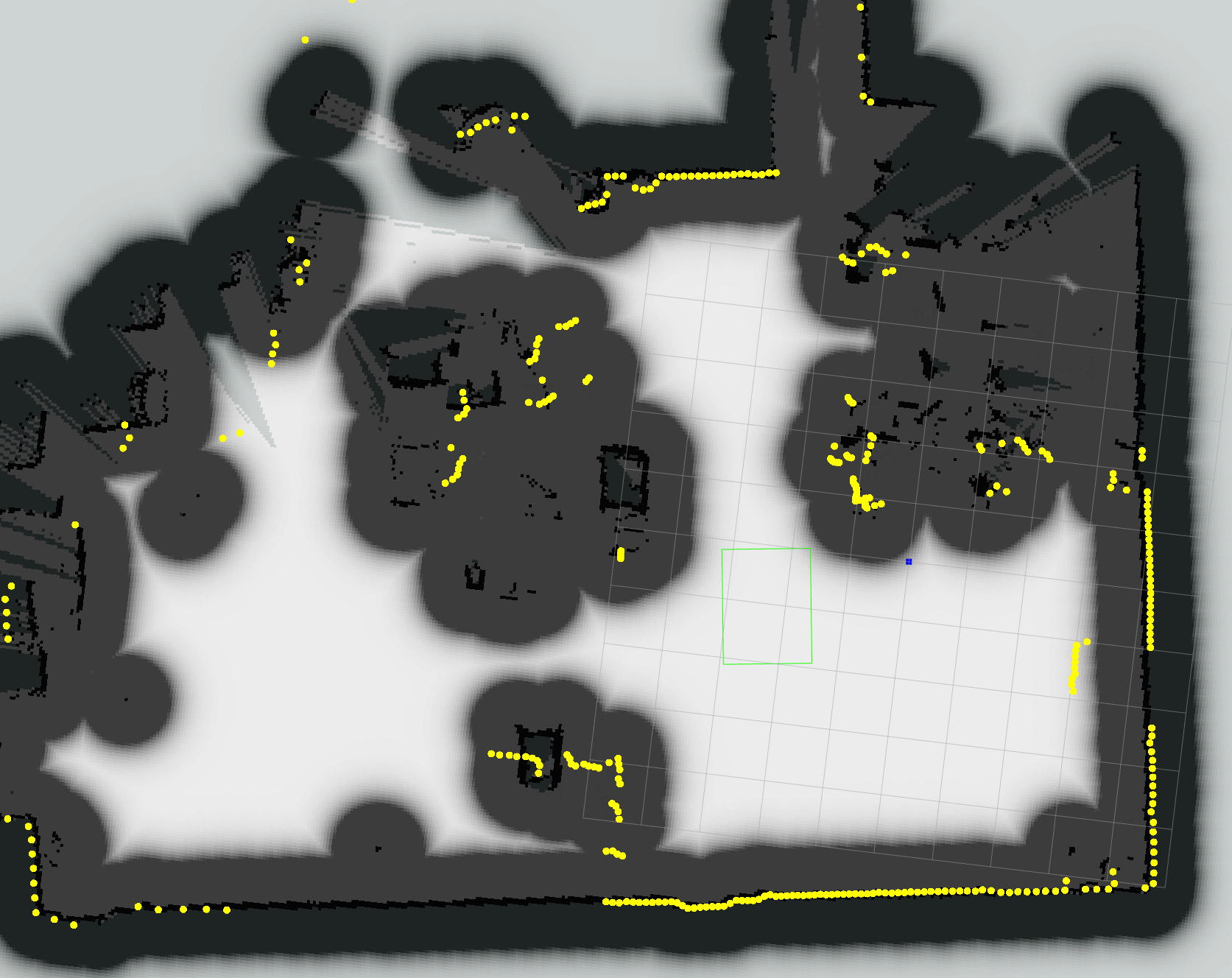
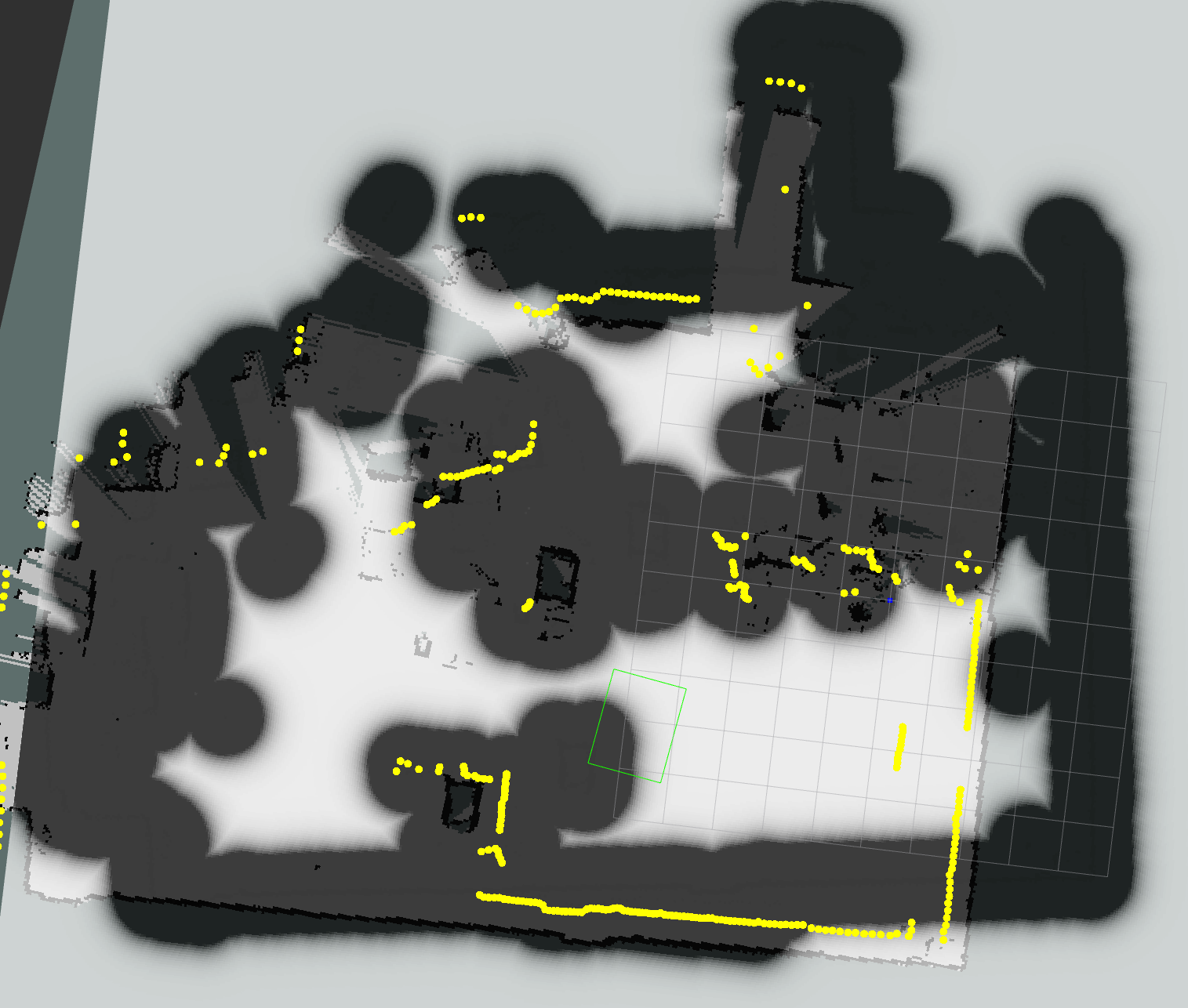
| 2020-11-07 06:17:08 -0500 | marked best answer | after changing the yaw in the map.yaml, costmap does not take that yaw. I use the below yaml for getting the map using the map_server package. I changed the yaw in the origin tag of the original yaml to -0.102. This change resulted into weird costmap. Please help. My setup is a typical ros navstack using move_base. this also affects amcl slam as localization is way off. I have already played around with /initial_pose. the setup works fine if i do not change the yaw in the map.yaml file. with original yaw=0.0
with yaw = -0.0102
|
| 2020-11-06 17:45:06 -0500 | commented answer | after changing the yaw in the map.yaml, costmap does not take that yaw. @miura can you point me how to change map_zone.pgm? Are any opensource tools available? |
| 2020-11-06 05:38:23 -0500 | edited question | after changing the yaw in the map.yaml, costmap does not take that yaw. after changing the yaw in the map.yaml, costmap does not take that yaw. I use the below yaml for getting the map using t |
| 2020-11-06 05:38:19 -0500 | edited question | after changing the yaw in the map.yaml, costmap does not take that yaw. after changing the yaw in the map.yaml, costmap does not take that yaw. I use the below yaml for getting the map using t |
| 2020-11-06 05:35:52 -0500 | asked a question | after changing the yaw in the map.yaml, costmap does not take that yaw. after changing the yaw in the map.yaml, costmap does not take that yaw. I use the below yaml for getting the map using t |
| 2020-11-03 04:01:56 -0500 | commented question | Navigation stack dwa local planner crashes into dynamic obstacles @Yehor @Dragonslayer How do you get such large local plan paths (thin long magenta lines). My DWA setup gives me short |
| 2020-11-03 04:01:56 -0500 | received badge | ● Commentator |
| 2020-11-03 04:01:04 -0500 | answered a question | Navigation stack dwa local planner crashes into dynamic obstacles @Yehor @Dragonslayer How do you get such large local plan paths (thin long magenta lines). My DWA setup gives me short |
| 2020-11-03 02:28:49 -0500 | commented question | DWA planner failed to produce path after ultrasonic sensor detects obstacle can you post your params? |
| 2020-11-03 02:18:06 -0500 | answered a question | How does the DWA planner handle continuously updated goals? first setup dwa and navstack (movebase) to accept single goal and make it working. Then use waypoint navigation package |
| 2020-11-02 18:30:24 -0500 | answered a question | Path planning using .yaml an .pgm map files Use move_base package (also called as ROS Navigation stack). you will specifically use costmap2d package to supply grid |
| 2020-10-20 21:47:05 -0500 | commented question | base_local_planner does not respect velocity constraints facing same scenario. Still debugging it. |
| 2020-07-10 02:18:47 -0500 | commented answer | How to deactivate image_transport plugins? you can also just uninstall the unnecessary image_transport pluggins like: sudo apt-get remove ros-melodic-theora-image |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
 (/upfiles/16046623663103974.png)
(/upfiles/16046623663103974.png)