
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-06-15 23:24:30 -0500 | received badge | ● Famous Question (source) |
| 2017-12-20 20:31:24 -0500 | received badge | ● Famous Question (source) |
| 2016-11-09 08:04:26 -0500 | received badge | ● Student (source) |
| 2016-05-19 23:24:54 -0500 | received badge | ● Notable Question (source) |
| 2015-04-02 15:23:59 -0500 | received badge | ● Notable Question (source) |
| 2015-03-02 18:09:29 -0500 | received badge | ● Famous Question (source) |
| 2015-02-22 20:38:15 -0500 | received badge | ● Notable Question (source) |
| 2015-02-13 01:14:52 -0500 | received badge | ● Famous Question (source) |
| 2014-12-16 10:54:50 -0500 | received badge | ● Notable Question (source) |
| 2014-12-16 10:41:10 -0500 | commented answer | How can I get the positions data of every joint ? Thank you very much, I am using planning of motion_planning_rviz_plugin to display the pose of every joint, I am wondering if I can get pose information directly from motion_planning_rviz_plugin::planning? Thank you |
| 2014-12-16 10:17:19 -0500 | received badge | ● Popular Question (source) |
| 2014-12-16 10:07:25 -0500 | commented answer | How can I get the positions data of every joint ? Thank you, I will try to do what you have suggested. I am using Fuerte. |
| 2014-12-15 13:22:32 -0500 | asked a question | How can I get the positions data of every joint ? Hi everyone, I am doing arm trajectory planning.
Now I am using motion_planning_rviz_plugin to display the trajectory of the arm. First I wrote program reference to link text and then RVIZ subscribe the topic "joint_path_display".
I can display the trajectory just like the picture Thanks in advance |
| 2014-12-08 11:22:30 -0500 | received badge | ● Popular Question (source) |
| 2014-12-08 10:40:23 -0500 | commented question | How can I use software BRIDE in ROS FUERTE? Yes, you should use rosbuild in ROS Fuerte. Maybe you can reference the Ros answer: link text |
| 2014-12-06 21:08:33 -0500 | answered a question | where can I find ros cheat cheet link text that is for fuerte |
| 2014-12-05 10:31:58 -0500 | commented question | How can I get 4 joints IK from 6DOF arm? Thanks for your help |
| 2014-12-04 21:04:10 -0500 | asked a question | How can I get 4 joints IK from 6DOF arm? Hi everyone,
Now I am doing 6dof arm path planning. I need to control the robot arm from one position to another position. I first have to get the IK and then plan a path. The getik programs are as follow. I just hope to get IK from 4 joints(other 2 joints are set to zero). I am wondering what should I do? And another question: what is the principle of thanks advance |
| 2014-12-03 20:34:54 -0500 | received badge | ● Notable Question (source) |
| 2014-12-03 13:12:42 -0500 | commented question | about the kinematics_msgs::GetPositionIK::Request and response Thanks for your responds very much. In fact we already have a urdf file and can drive reality robot arm through warehouse-viewer .we try to get the ik and drive the arm to some positions. I just wondering sometimes the Ik solution can get, but round data then can not get ik solution( above data) |
| 2014-12-03 13:12:42 -0500 | received badge | ● Commentator |
| 2014-12-03 10:55:11 -0500 | commented answer | how to install erratic-robot on the hydro? Thank you very much, it worked. |
| 2014-12-02 22:46:49 -0500 | received badge | ● Popular Question (source) |
| 2014-12-02 22:46:28 -0500 | commented answer | how to install erratic-robot on the hydro? Thank you very much , now i will try to do what you have suggested. |
| 2014-12-02 22:13:41 -0500 | commented answer | how to install erratic-robot on the hydro? Thank you. I downloaded the erratic_robot-master.zip and make it, and then use catkin_make command, but package player(erratic robot) still can not be found. how can i converted it to catkin? I already installed it in fuerte, now i have two version in my computer |
| 2014-12-02 19:42:03 -0500 | asked a question | how to install erratic-robot on the hydro? Hi everyone I want to migrate fuerte package to hydro. Before the package depend on erratic robot package. How can i install erratic-robot on hydro? Thanks |
| 2014-12-02 14:41:10 -0500 | received badge | ● Popular Question (source) |
| 2014-12-01 11:25:39 -0500 | received badge | ● Editor (source) |
| 2014-11-30 14:58:13 -0500 | asked a question | about the kinematics_msgs::GetPositionIK::Request and response Hi everyone, I am planning the trajectory of 6dof robot arm to move arm from a initial position to a new position. First I have to get the ik solution and then plan in joint space. When using kinematics_msgs::GetPositionIK::Request and response to get the ik, usually can not get a IK solution. Such as: When i use position(.235,-.2996,-.3011) and quaternions(.674056,-.73868,0,0) , can get the IK solution. If the position is (.235,-.3,-.3) and quaternions are the same are (.674056,-.73868,0,0) , can not get the IK solution. The data nearly is the same. How to solve such problem? I am using ros fuerte on Ubuntu12.04 Thanks advance |
| 2014-11-23 23:36:06 -0500 | received badge | ● Notable Question (source) |
| 2014-11-23 20:51:49 -0500 | commented answer | How to get rotaion matrix or quaternion? Thanks for your answer. This link text is helpful. I have to get roll,pitch,yaw at the point B first, and then use the function what you have suggested to get quaternion. |
| 2014-11-23 14:35:02 -0500 | received badge | ● Popular Question (source) |
| 2014-11-23 13:10:31 -0500 | commented question | How to get rotaion matrix or quaternion? I saw function: |
| 2014-11-23 13:03:21 -0500 | commented question | How to get rotaion matrix or quaternion? Thank you very much, I will try. |
| 2014-11-23 11:19:11 -0500 | asked a question | How to get rotaion matrix or quaternion? Hello all, I am doing some arm planning about my robot. I have a point B(x2,y2,z2) in space where I want the end-effector A(x1,y1,z1) to go. In my opinion, I had better get the quaternion of point B first, then get the IK using point B and quaternion, after that I can use arm_navigation_msgs::GetMotionPlan to do a plan. but I am unsure how to produce the quaternions. or any other good method to plan end-effector from A to B? Thanks in advance. |
| 2014-11-17 14:25:40 -0500 | received badge | ● Famous Question (source) |
| 2014-10-06 02:35:05 -0500 | received badge | ● Popular Question (source) |
| 2014-04-20 06:54:49 -0500 | marked best answer | turtlemimic.launch I run line: $ roslaunch beginner_tutorials turtlemimic.launch the error is : cannot locate [turtlemimic.launch] in package [beginner_tutorials] Thanks |
| 2014-03-26 09:54:08 -0500 | received badge | ● Notable Question (source) |
| 2014-03-26 07:25:40 -0500 | answered a question | How to get the trajectory data? Look up in the rosbag or subscribe the topic and then save the data in a array or a file. |
| 2014-03-26 07:15:01 -0500 | asked a question | rosrun skeleton_markers skeleton_tracker error Hi everyone, I am using ROS fuerte and doing robot imitation human's action. Now I want to get joint configuration information running "rosrun skeleton_markers skeleton_tracker", but it has a mistake as below: **InitFromXml failed: File not found! Segmentation fault (core dumped)** I can rosmake skeleton_markers. In fact, when I use pi_tracker package, the same error. Thanks |
| 2014-03-13 06:28:14 -0500 | received badge | ● Enthusiast |
| 2014-03-12 10:23:25 -0500 | commented answer | urdf beginner error thanks, it works |
| 2014-02-28 18:26:51 -0500 | received badge | ● Popular Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
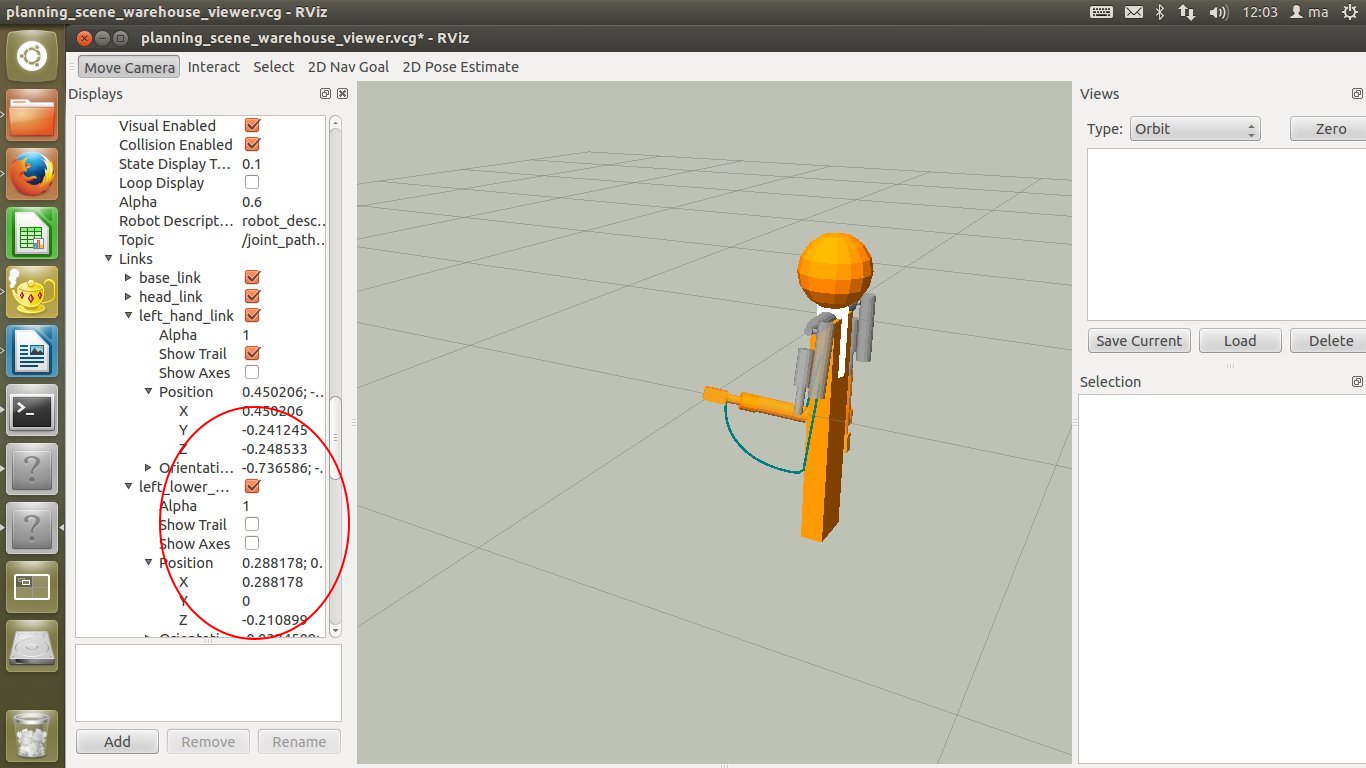 !
Now I want to get the position data of every joints which I circled with red colour on the image.
How can I get the position information of every joint?
!
Now I want to get the position data of every joints which I circled with red colour on the image.
How can I get the position information of every joint?