The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-08-29 09:32:29 -0500 | received badge | ● Famous Question (source) |
| 2022-06-02 03:22:01 -0500 | received badge | ● Notable Question (source) |
| 2021-12-08 12:54:20 -0500 | received badge | ● Famous Question (source) |
| 2021-08-18 03:26:00 -0500 | received badge | ● Famous Question (source) |
| 2021-08-18 03:26:00 -0500 | received badge | ● Notable Question (source) |
| 2021-08-01 21:39:41 -0500 | received badge | ● Famous Question (source) |
| 2021-08-01 21:39:41 -0500 | received badge | ● Notable Question (source) |
| 2021-08-01 21:39:41 -0500 | received badge | ● Popular Question (source) |
| 2021-06-02 07:37:12 -0500 | received badge | ● Famous Question (source) |
| 2021-06-02 07:37:12 -0500 | received badge | ● Notable Question (source) |
| 2021-04-11 17:20:08 -0500 | received badge | ● Taxonomist |
| 2021-04-09 15:45:55 -0500 | received badge | ● Popular Question (source) |
| 2021-03-08 05:35:53 -0500 | received badge | ● Famous Question (source) |
| 2021-02-03 09:42:52 -0500 | received badge | ● Famous Question (source) |
| 2020-12-28 05:17:07 -0500 | received badge | ● Famous Question (source) |
| 2020-12-07 20:51:36 -0500 | received badge | ● Famous Question (source) |
| 2020-10-26 10:53:34 -0500 | received badge | ● Notable Question (source) |
| 2020-10-26 10:53:34 -0500 | received badge | ● Popular Question (source) |
| 2020-10-22 11:23:15 -0500 | received badge | ● Famous Question (source) |
| 2020-09-10 05:14:10 -0500 | received badge | ● Popular Question (source) |
| 2020-08-31 00:22:02 -0500 | received badge | ● Famous Question (source) |
| 2020-08-07 04:30:52 -0500 | received badge | ● Notable Question (source) |
| 2020-08-06 06:46:52 -0500 | received badge | ● Famous Question (source) |
| 2020-07-13 05:07:36 -0500 | received badge | ● Notable Question (source) |
| 2020-07-10 05:07:13 -0500 | received badge | ● Notable Question (source) |
| 2020-07-09 02:30:05 -0500 | received badge | ● Famous Question (source) |
| 2020-07-07 00:16:37 -0500 | received badge | ● Notable Question (source) |
| 2020-06-29 03:17:17 -0500 | received badge | ● Popular Question (source) |
| 2020-05-21 03:23:59 -0500 | asked a question | How to deploy ROS nodes on multiple embedded platforms to make the operation more efficient? How to deploy ROS nodes on multiple embedded platforms to make the operation more efficient? My robot system uses rtabma |
| 2020-05-19 14:19:52 -0500 | received badge | ● Notable Question (source) |
| 2020-05-13 15:11:00 -0500 | received badge | ● Popular Question (source) |
| 2020-05-13 12:50:04 -0500 | received badge | ● Notable Question (source) |
| 2020-05-06 10:18:02 -0500 | received badge | ● Notable Question (source) |
| 2020-05-05 04:38:17 -0500 | asked a question | Failed to load nodelet '/ekf_se` of type `RobotLocalization/EkfNodelet` to manager `/mobile_base_nodelet_manager' Failed to load nodelet '/ekf_se` of type `RobotLocalization/EkfNodelet` to manager `/mobile_base_nodelet_manager' The ro |
| 2020-05-02 10:25:44 -0500 | commented answer | How to make rtabmap use both visual odometer and wheel odometer? Although turtlebot2 published the odom topic, I am not sure whether IMU and wheel enconder are merged. I have raised a q |
| 2020-05-02 08:31:46 -0500 | asked a question | How to set the source of odom published by turtlebot2 or kobuki? How to set the source of odom published by turtlebot2 or kobuki? When using command roslaunch turtlebot_bringup minimal. |
| 2020-04-28 11:50:06 -0500 | commented answer | When using rtabmap to build a map, how to fill the blanks in the map and remove objects outside the map? 1) According to the above, when I set the parameter Grid / RayTracing to true and Grid / 3D to false, rtabmap convert th |
| 2020-04-28 11:49:53 -0500 | commented answer | When using rtabmap to build a map, how to fill the blanks in the map and remove objects outside the map? 1) According to the above, when I set the parameter Grid / RayTracing to true and Grid / 3D to false, rtabmap convert th |
| 2020-04-28 11:49:03 -0500 | commented answer | When using rtabmap to build a map, how to fill the blanks in the map and remove objects outside the map? 1) According to the above, when I set the parameter Grid / RayTracing to true and Grid / 3D to false, rtabmap convert th |
| 2020-04-28 11:48:36 -0500 | commented answer | When using rtabmap to build a map, how to fill the blanks in the map and remove objects outside the map? 1) According to the above, when I set the parameter Grid / RayTracing to true and Grid / 3D to false, rtabmap convert th |
| 2020-04-28 10:32:07 -0500 | commented answer | When using rtabmap to build a map, how to fill the blanks in the map and remove objects outside the map? 1) According to the above, when I set the parameter Grid / RayTracing to true and Grid / 3D to false, rtabmap convert th |
| 2020-04-28 10:31:46 -0500 | commented answer | When using rtabmap to build a map, how to fill the blanks in the map and remove objects outside the map? 1) According to the above, when I set the parameter Grid / RayTracing to true and Grid / 3D to false, rtabmap convert th |
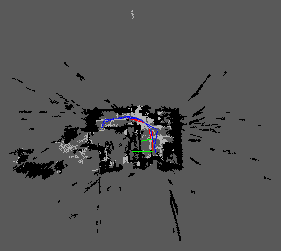
| 2020-04-28 04:20:23 -0500 | marked best answer | When using rtabmap to build a map, how to fill the blanks in the map and remove objects outside the map? The robot I use is turtlebot2, and I use a ZED stereo camera instead of an RGBD camera, without using a lidar sensor. When I used the rtabmap algorithm to make my robot build a map in the room, I found that the results were as shown below:
Radial black parts on the right, bottom, and left should not have appeared on the map because they are beyond the scope of the room. I want to know how to remove them? The light gray part in the middle (L-shaped, with path passing) is empty without obstacles. But they don't seem to be completely filled, and some are left blank (around the start and end of the path). What should I do to make these areas that should be ground also marked light gray? |
| 2020-04-28 04:20:23 -0500 | received badge | ● Commentator |
| 2020-04-28 04:20:23 -0500 | commented answer | When using rtabmap to build a map, how to fill the blanks in the map and remove objects outside the map? According to the above, when I set the parameter Grid / RayTracing to true and Grid / 3D to false, can rtabmap convert t |
| 2020-04-26 04:31:46 -0500 | received badge | ● Popular Question (source) |
| 2020-04-25 23:49:17 -0500 | asked a question | Timed out waiting for transform from base_footprint to rtabmap/odom to become available before running costmap Timed out waiting for transform from base_footprint to rtabmap/odom to become available before running costmap I use rta |
| 2020-04-25 21:00:52 -0500 | commented answer | How to identify lines on the ground when mapping? In other words, I need to write a node or package to subscribe to the color images and depth images of the depth camera, |
| 2020-04-24 12:40:44 -0500 | asked a question | Some errors when using GlobalPlanner Some errors when using GlobalPlanner I used navfn / NavfnROS as a global planner, it can correctly plan the path from th |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.