The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-07-06 15:30:37 -0500 | received badge | ● Famous Question (source) |
| 2023-06-15 13:07:50 -0500 | received badge | ● Student (source) |
| 2023-06-15 13:07:40 -0500 | received badge | ● Famous Question (source) |
| 2023-06-15 13:07:40 -0500 | received badge | ● Notable Question (source) |
| 2023-06-15 13:07:40 -0500 | received badge | ● Popular Question (source) |
| 2023-06-05 18:39:25 -0500 | edited question | Hello, I want to use the Groot monitor. Is it possible to use a groot monitor with the turtlebot simulation ? Hello, I want to use the Groot monitor. My question is, is it possible to use a groot monitor with the turtlebot simulat |
| 2023-06-05 18:37:22 -0500 | edited question | Hello, I want to use the Groot monitor. Is it possible to use a groot monitor with the turtlebot simulation ? Hello, I want to use the Groot monitor. My question is, is it possible to use a groot monitor with the turtlebot simulat |
| 2023-06-05 18:37:13 -0500 | edited question | Hello, I want to use the Groot monitor. Is it possible to use a groot monitor with the turtlebot simulation ? Hello, I want to use the Groot monitor. My question is, is it possible to use a groot monitor with the turtlebot simulat |
| 2023-06-05 18:04:12 -0500 | asked a question | Hello, I want to use the Groot monitor. Is it possible to use a groot monitor with the turtlebot simulation ? Hello, I want to use the Groot monitor. My question is, is it possible to use a groot monitor with the turtlebot simulat |
| 2023-06-01 10:47:32 -0500 | commented answer | Hello everyone, I am running multiple nodes in different executables and I would like to use MultiThreadedExecutor. However, how to know which cores are my nodes using ? Thank you for your answer. However, do you know if there is a way to relate ros2 nodes with the process Id. Because as y |
| 2023-06-01 09:59:30 -0500 | received badge | ● Popular Question (source) |
| 2023-05-31 16:14:21 -0500 | asked a question | Hello everyone, I am running multiple nodes in different executables and I would like to use MultiThreadedExecutor. However, how to know which cores are my nodes using ? Hello everyone, I am running multiple nodes in different executables and I would like to use MultiThreadedExecutor. Howe |
| 2023-05-26 14:55:59 -0500 | commented answer | I am using in rviz2 the tool nav2 goal. But I want to cancel the robot's navigation when it is at a distance of less than 2 meters from an obstacle Thanks a lot, I use the action client navigate_to_pose. I just create the client and with the function async_cancel_all_ |
| 2023-05-26 14:55:18 -0500 | commented answer | I am using in rviz2 the tool nav2 goal. But I want to cancel the robot's navigation when it is at a distance of less than 2 meters from an obstacle Thanks a lot, I use the action client navigate_to_pose. I just create the client and with the function async_cancel_all_ |
| 2023-05-26 14:54:40 -0500 | commented answer | I am using in rviz2 the tool nav2 goal. But I want to cancel the robot's navigation when it is at a distance of less than 2 meters from an obstacle Thanks a lot, I use the action client navigate_to_pose. I just create the client and with the function async_cancel_all_ |
| 2023-05-26 14:54:26 -0500 | commented answer | I am using in rviz2 the tool nav2 goal. But I want to cancel the robot's navigation when it is at a distance of less than 2 meters from an obstacle Thanks a lot, I use the action client navigate_to_pose. I just create the client and with the function async_cancel_all_ |
| 2023-05-26 14:52:33 -0500 | commented answer | I am using in rviz2 the tool nav2 goal. But I want to cancel the robot's navigation when it is at a distance of less than 2 meters from an obstacle Thanks a lot, I use the action client navigate_to_pose. I just create the client and with the function async_cancel_all_ |
| 2023-05-26 14:52:11 -0500 | commented answer | I am using in rviz2 the tool nav2 goal. But I want to cancel the robot's navigation when it is at a distance of less than 2 meters from an obstacle Thanks a lot, I use the action client navigate_to_pose. I just create the client and with the function async_cancel_all_ |
| 2023-05-26 14:51:32 -0500 | commented answer | I am using in rviz2 the tool nav2 goal. But I want to cancel the robot's navigation when it is at a distance of less than 2 meters from an obstacle Thanks a lot, I use the action client navigate_to_pose. I just create the client and with the function async_cancel_all_ |
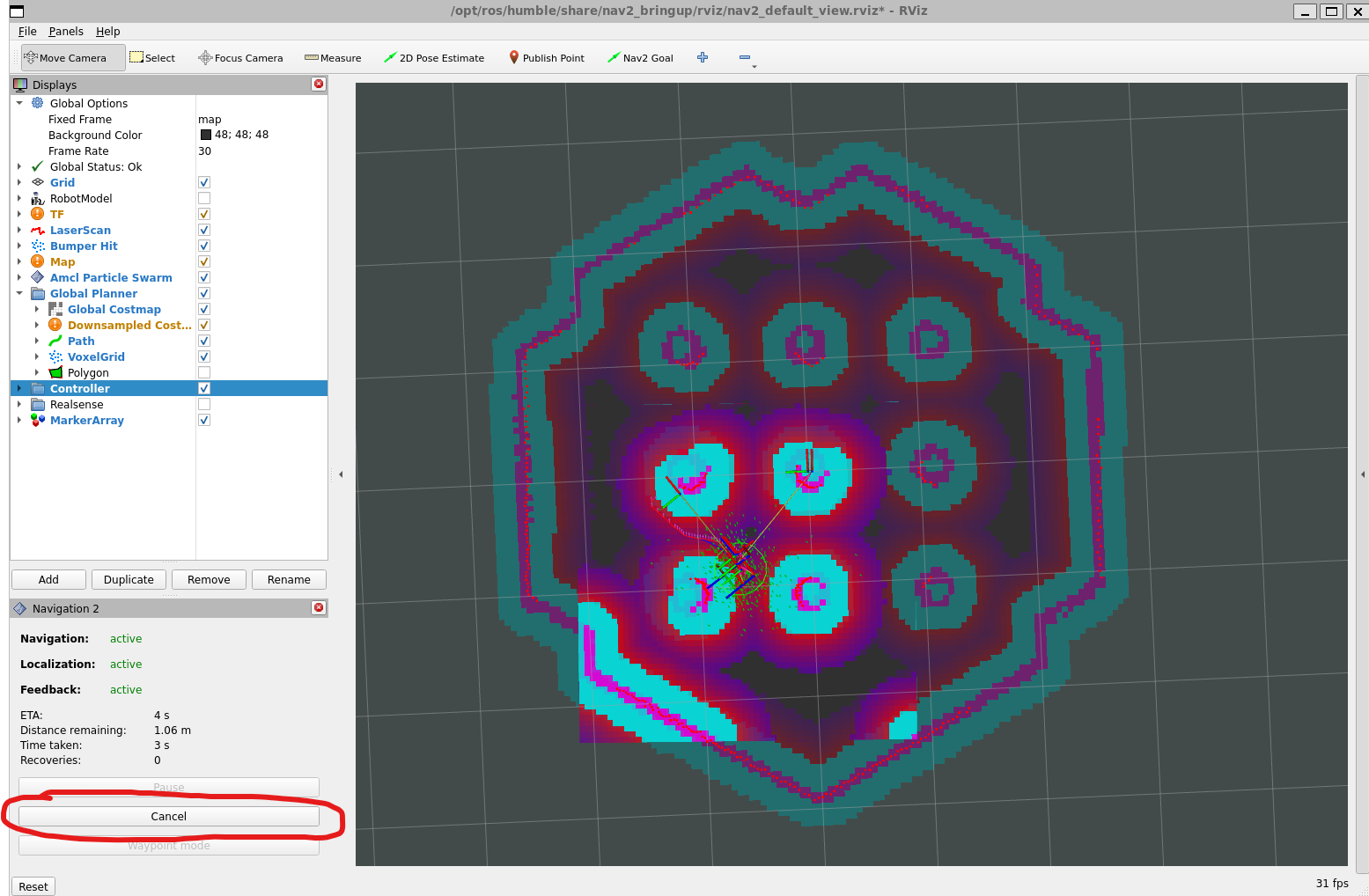
| 2023-05-26 14:47:44 -0500 | marked best answer | I am using in rviz2 the tool nav2 goal. But I want to cancel the robot's navigation when it is at a distance of less than 2 meters from an obstacle I want to replicate this button but in a python code. The robot should stop if it is close <2 m from any obstacle. I know the functions BasicNavigator.cancelTask() works but just if you add the goal in code but I need to use the Nav2 Goal tool.
I tried using the Simple Commander API just calling the BasicNavigator.cancelTask() function but is not working I think I am using wrong. Does anyone how to do it ? It should be calling a service but I do not know which one exactly. |
| 2023-05-26 12:30:44 -0500 | received badge | ● Notable Question (source) |
| 2023-05-24 14:08:54 -0500 | received badge | ● Popular Question (source) |
| 2023-05-23 20:34:51 -0500 | edited question | I am using in rviz2 the tool nav2 goal. But I want to cancel the robot's navigation when it is at a distance of less than 2 meters from an obstacle I am using in rviz2 the tool nav2 goal. But I want to cancel the robot's navigation when it is at a distance of less tha |
| 2023-05-23 20:34:16 -0500 | edited question | I am using in rviz2 the tool nav2 goal. But I want to cancel the robot's navigation when it is at a distance of less than 2 meters from an obstacle I am using in rviz2 the tool nav2 goal. But I want to cancel the robot's navigation when it is at a distance of less tha |
| 2023-05-23 20:22:41 -0500 | asked a question | I am using in rviz2 the tool nav2 goal. But I want to cancel the robot's navigation when it is at a distance of less than 2 meters from an obstacle I am using in rviz2 the tool nav2 goal. But I want to cancel the robot's navigation when it is at a distance of less tha |
| 2022-10-18 05:16:27 -0500 | received badge | ● Famous Question (source) |
| 2021-04-26 14:59:34 -0500 | received badge | ● Famous Question (source) |
| 2020-09-21 07:59:13 -0500 | received badge | ● Famous Question (source) |
| 2020-05-08 17:52:54 -0500 | received badge | ● Notable Question (source) |
| 2020-01-22 08:49:41 -0500 | received badge | ● Notable Question (source) |
| 2020-01-10 11:33:33 -0500 | received badge | ● Notable Question (source) |
| 2020-01-10 11:32:42 -0500 | received badge | ● Enthusiast |
| 2020-01-09 16:46:14 -0500 | received badge | ● Popular Question (source) |
| 2020-01-09 11:41:19 -0500 | commented question | hi, I have a troubule with this code, this run but when write in terminal rostopic hz '/PWM' say 'no new messages', and when write rostopic echo /PWM, not display anything. please what can I do ? yes, i'm sure, I use for publish self.pub.publish(msg), for this reason see the topic, but when write rostopic echo, thi |
| 2020-01-08 15:54:40 -0500 | edited question | hi, I have a troubule with this code, this run but when write in terminal rostopic hz '/PWM' say 'no new messages', and when write rostopic echo /PWM, not display anything. please what can I do ? hi, I have a troubule with this code, this run but when write in terminal rostopic hz '/PWM' say 'no new messages', and |
| 2020-01-08 15:53:44 -0500 | edited question | hi, I have a troubule with this code, this run but when write in terminal rostopic hz '/PWM' say 'no new messages', and when write rostopic echo /PWM, not display anything. please what can I do ? hi, I have a troubule with this code, this run but when write in terminal rostopic hz '/PWM' say 'no new messages', and |
| 2020-01-08 15:53:44 -0500 | received badge | ● Editor (source) |
| 2020-01-08 15:52:28 -0500 | edited question | hi, I have a troubule with this code, this run but when write in terminal rostopic hz '/PWM' say 'no new messages', and when write rostopic echo /PWM, not display anything. please what can I do ? hi, I have a troubule with this code, this run but when write in terminal rostopic hz '/PWM' say 'no new messages', and |
| 2020-01-08 15:51:24 -0500 | asked a question | hi, I have a troubule with this code, this run but when write in terminal rostopic hz '/PWM' say 'no new messages', and when write rostopic echo /PWM, not display anything. please what can I do ? hi, I have a troubule with this code, this run but when write in terminal rostopic hz '/PWM' say 'no new messages', and |
| 2020-01-03 18:44:24 -0500 | commented answer | Hi, I want to use the message filter in this example , I tried to register callback from a class member function as in the following code: Thanks you!, you are correct, forgot the nav_msgs in the CMakelist, thaks |
| 2020-01-03 18:43:02 -0500 | marked best answer | Hi, I want to use the message filter in this example , I tried to register callback from a class member function as in the following code: and this its the error that show, sorry it's so long. |
| 2019-12-31 08:07:14 -0500 | received badge | ● Popular Question (source) |
| 2019-12-30 03:23:53 -0500 | commented answer | I have an error trying to subscribe to multiple topics, between them there are two of the same type, this is the error, please what can I do ? Thank you!, published this tipic with a message type that had Header, use Odometry for this case and works well thanks. |
| 2019-12-30 03:23:53 -0500 | asked a question | Hi, I want to use the message filter in this example , I tried to register callback from a class member function as in the following code: Hi, For the example of message filter in this example , I tried to register callback from a class member function as in |
| 2019-12-30 00:10:13 -0500 | marked best answer | I have an error trying to subscribe to multiple topics, between them there are two of the same type, this is the error, please what can I do ? this is the code: this is the error that show |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.