The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2019-12-09 10:20:22 -0500 | received badge | ● Famous Question (source) |
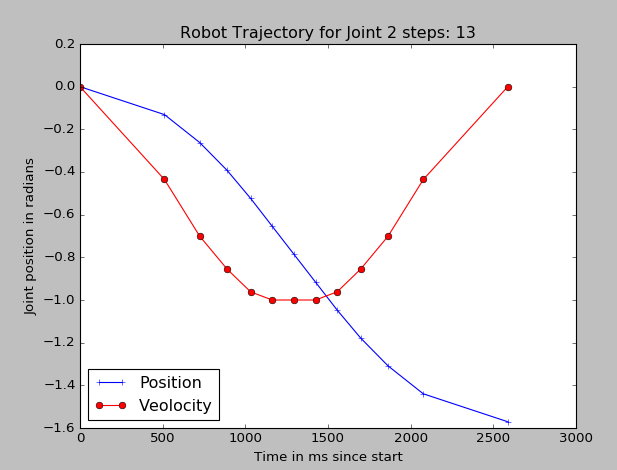
| 2019-12-07 14:21:27 -0500 | marked best answer | Industrial Robot Client sends wrong velocity on last waypoint? Abstract: Created a plan to rotate single joint from 0 to pi/2 radians. Examined plan looks fine with smoothly tapering velocity, however, actual robot motion ends with accelerated jerk at end. Wireshark packet sniffing reveals velocity in broadcast packet for the last waypoint is wrong. Details: Ubuntu 16.04 (kernel 4.15.0-70-generic) ROS Kinetic Used apt dist-upgrade to get to latest versions Using Staubli Experimental Package with Staubli TX60 Reduced joint speeds using joint_limits.yaml to set all max joint velocities to 1 In particular, joint_3 had velocity 9.424777960769999 and we set it to 1 (approx 1/10th). I think I am using OMPL RRT Connect Setup problem where we move single joint, joint_3 from 0 to -pi/2 radians. Use moveit to construct a plan: Plan has 13 steps with these way points (updated table with full precision values): Basically, velocity follows a bell curve and position looks like a cumulative normal.
Use wireshark to capture outgoing "simplemessage" to robot controller. Joint Trajectory Point (rounded to 3 decimals). The broadcast also has 13 waypoints. It looks like the scaling factor for max velocity has been applied in executor?? For instance, 0.435 * (1.0/9.424) = 0.0461 ... Velocity and Duration from Trajectory Point Messages (updated by extracting directly by script from wireshark json log of dissected messages): In a separate run inspired by Simon's comment, we were able to capture the position coming back from the robot. It seems like the robot controller is falling behind the plan. If we change the joint velocity limit to a lower value, the plan velocities adjust as expected, but the robot still seems to fall behind. The sudden velocity increase at the end looks like an attempt by the robot to catch up to the desired position. In the graph below we set the joint limit to 0.75 and the peak ... (more) |
| 2019-12-07 14:21:27 -0500 | received badge | ● Scholar (source) |
| 2019-12-07 14:20:41 -0500 | edited question | Industrial Robot Client sends wrong velocity on last waypoint? Industrial Robot Client sends wrong velocity on last waypoint? Abstract: Created a plan to rotate single joint from 0 t |
| 2019-11-28 03:59:16 -0500 | received badge | ● Notable Question (source) |
| 2019-11-27 18:52:56 -0500 | commented question | Industrial Robot Client sends wrong velocity on last waypoint? Reran the experiment and captured plan with more decimals and wrote a script to computationally parse out wireshark diss |
| 2019-11-27 17:35:55 -0500 | edited question | Industrial Robot Client sends wrong velocity on last waypoint? Industrial Robot Client sends wrong velocity on last waypoint? Abstract: Created a plan to rotate single joint from 0 t |
| 2019-11-26 22:48:59 -0500 | edited question | Industrial Robot Client sends wrong velocity on last waypoint? Industrial Robot Client sends wrong velocity on last waypoint? Abstract: Created a plan to rotate single joint from 0 t |
| 2019-11-26 22:37:01 -0500 | commented question | Industrial Robot Client sends wrong velocity on last waypoint? I see that a velocity of zero would be problematic... It seemed like seq 1 and seq 12 could not both be consistent veloc |
| 2019-11-26 07:51:46 -0500 | received badge | ● Popular Question (source) |
| 2019-11-25 18:11:08 -0500 | edited question | Industrial Robot Client sends wrong velocity on last waypoint? Industrial Robot Client sends wrong velocity on last waypoint? Abstract: Created a plan to rotate single joint from 0 t |
| 2019-11-25 16:46:47 -0500 | commented question | Industrial Robot Client sends wrong velocity on last waypoint? Thanks gvdhoorn for opening a ticket and the background info. Learning more all the time. |
| 2019-11-25 16:38:25 -0500 | received badge | ● Organizer (source) |
| 2019-11-25 16:35:55 -0500 | edited question | Industrial Robot Client sends wrong velocity on last waypoint? Industrial Robot Client sends wrong velocity on last waypoint? Abstract: Created a plan to rotate single joint from 0 t |
| 2019-11-25 16:35:55 -0500 | received badge | ● Editor (source) |
| 2019-11-25 16:34:25 -0500 | edited question | Industrial Robot Client sends wrong velocity on last waypoint? Moveit executor sends wrong velocity on last waypoint? Abstract: Created a plan to rotate single joint from 0 to pi/2 r |
| 2019-11-25 14:45:25 -0500 | asked a question | Industrial Robot Client sends wrong velocity on last waypoint? Moveit executor sends wrong velocity on last waypoint? Abstract: Created a plan to rotate single joint from 0 to pi/2 r |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.