
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-06-29 19:45:13 -0500 | asked a question | Why multiple of gazebo_ros_control are not allowed? Why multiple of gazebo_ros_control are not allowed? I have one robot model but I need to use two instances of gazebo_ros |
| 2023-06-29 19:45:10 -0500 | asked a question | Why multiple of gazebo_ros_control are not allowed? Why multiple of gazebo_ros_control are not allowed? I have one robot model but I need to use two instances of gazebo_ros |
| 2023-06-28 10:03:16 -0500 | received badge | ● Notable Question (source) |
| 2023-06-28 10:02:32 -0500 | received badge | ● Famous Question (source) |
| 2023-06-28 10:02:32 -0500 | received badge | ● Notable Question (source) |
| 2023-06-28 10:01:34 -0500 | received badge | ● Famous Question (source) |
| 2023-06-05 11:19:07 -0500 | commented question | Publishing at 1kHz for haptic applications @gvdhoorn, it worked good. thank you. |
| 2023-06-01 10:01:36 -0500 | received badge | ● Popular Question (source) |
| 2023-05-30 12:41:29 -0500 | asked a question | Publishing at 1kHz for haptic applications Publishing at 1kHz for haptic applications Would it be possible to publish data at 1kHz without detrimental effects? My |
| 2023-05-25 10:42:09 -0500 | commented answer | filtering and republishing topic messages from console Is it possible to do from the code (i.e. C++)? |
| 2023-05-25 10:25:00 -0500 | commented question | FT sensor plugin on gazebo Because the joint's type is fixed. Add this line <preserveFixedJoint>true</preserveFixedJoint>, it should do |
| 2023-05-23 09:24:28 -0500 | received badge | ● Notable Question (source) |
| 2023-05-23 09:22:48 -0500 | edited answer | Why to use std::bind to declare the callback function This has to do with C++. Usually, when you create a class, you want to encapsulate your data inside the class. The creat |
| 2023-05-23 09:17:41 -0500 | received badge | ● Famous Question (source) |
| 2023-05-23 09:15:51 -0500 | received badge | ● Famous Question (source) |
| 2023-05-17 05:28:13 -0500 | received badge | ● Famous Question (source) |
| 2023-05-13 05:14:39 -0500 | commented answer | Gazebo tag <disableFixedJointLumping> didn't work What is the option for Gazebo 9? |
| 2023-04-23 01:22:24 -0500 | received badge | ● Popular Question (source) |
| 2023-03-21 17:05:17 -0500 | received badge | ● Popular Question (source) |
| 2023-03-18 21:35:54 -0500 | received badge | ● Popular Question (source) |
| 2023-03-18 21:35:54 -0500 | received badge | ● Notable Question (source) |
| 2023-03-18 21:35:54 -0500 | received badge | ● Famous Question (source) |
| 2023-03-14 14:26:14 -0500 | asked a question | Problem with ros::Rate sleep function Problem with ros::Rate sleep function There seems to be a strange problem with the sleeping function for me. I've encoun |
| 2023-03-10 17:29:02 -0500 | received badge | ● Notable Question (source) |
| 2023-03-10 17:29:02 -0500 | received badge | ● Famous Question (source) |
| 2023-03-08 10:19:21 -0500 | received badge | ● Popular Question (source) |
| 2023-03-04 05:55:04 -0500 | asked a question | Understanding effort_controllers/JointTrajectoryController Understanding effort_controllers/JointTrajectoryController The manipulator I have has a gripper that is controlled by e |
| 2023-01-02 03:44:08 -0500 | commented question | ur5 robotic arm not responding to joint state publisher There is a need for more information. RViz is a tool for visualisation only. |
| 2022-12-31 03:42:50 -0500 | asked a question | The mobile robot doesn't reach to its max speed The mobile robot doesn't reach to its max speed The youBot mobile robot is being used to test some kinematic controllers |
| 2022-11-11 01:12:34 -0500 | received badge | ● Famous Question (source) |
| 2022-10-26 03:39:01 -0500 | received badge | ● Notable Question (source) |
| 2022-10-17 14:51:14 -0500 | commented question | How to combine data from subscriber and data from node itself? just create global variable. |
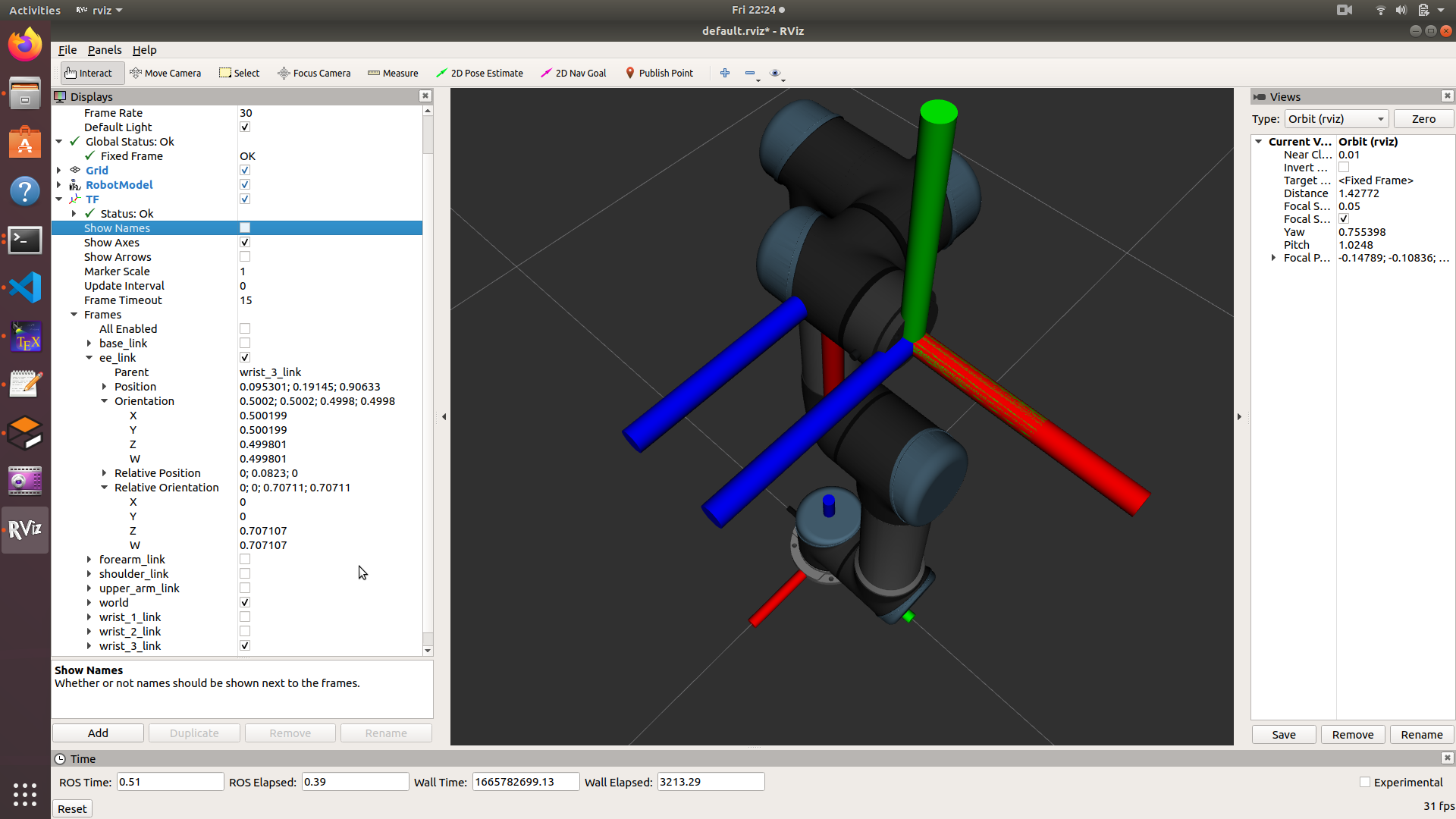
| 2022-10-17 14:34:37 -0500 | marked best answer | Clarification about relative orientation of UR5 I'm trying to understand the relative position and orientation. Take a look at the below picture. The end-effector frame (i.e. the top right frame) for the UR5 is shown. Its relative orientation is shown in RViz as
|
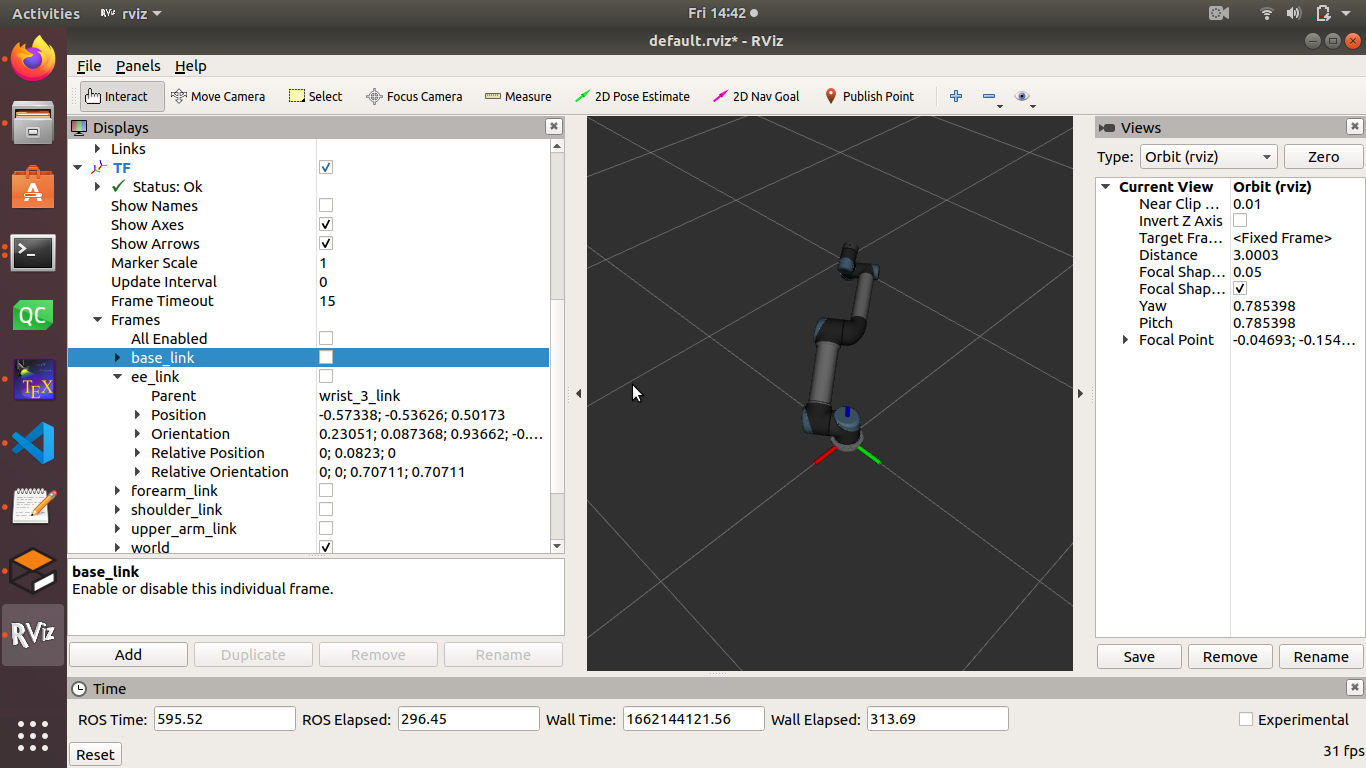
| 2022-10-17 14:34:17 -0500 | marked best answer | X-Y axes for UR5 appear reversed I'm trying to test a kinematic controller that relies on UR5 DH parameters. I'm using UR5 model in universal_robot and the classical DH parameters. The controller works but there is just one problem. The x-y axes are reversed. If I send 0.5i+0.5j+0.5k, the rviz shows -0.5i-0.5j+0.5k, see the below picture. You can see the the arm is going in the opposite direction of the x-y axes. How can I rectify this issue? I'm using Gazebo 9 and Melodic to simulate the robot. I really appreciate your help and feedback.
|
| 2022-10-17 14:34:15 -0500 | commented answer | X-Y axes for UR5 appear reversed DH method represents the orientation as a Rotation matrix not quaternion, but I think you are right in the way tf tree i |
| 2022-10-17 10:51:41 -0500 | received badge | ● Notable Question (source) |
| 2022-10-16 10:03:22 -0500 | commented answer | Clarification about relative orientation of UR5 Please take a look at my question https://answers.ros.org/question/405892/x-y-axes-for-ur5-appear-reversed/ |
| 2022-10-16 10:02:20 -0500 | received badge | ● Popular Question (source) |
| 2022-10-16 10:01:22 -0500 | commented answer | Clarification about relative orientation of UR5 In my controller, I'm using the standard DH parameters for UR5. It seems I need to modify this table so that both the co |
| 2022-10-15 15:35:48 -0500 | edited question | Clarification about relative orientation of UR5 Clarification about relative orientation I'm trying to understand the relative position and orientation. Take a look at |
| 2022-10-15 15:33:32 -0500 | commented answer | Clarification about relative orientation of UR5 Thank you for the answer. What do you mean by "made them up"? It seems to me this is the result of tf structure from rea |
| 2022-10-15 15:32:45 -0500 | edited question | Clarification about relative orientation of UR5 Clarification about relative orientation I'm trying to understand the relative position and orientation. Take a look at |
| 2022-10-15 15:31:00 -0500 | commented answer | Clarification about relative orientation of UR5 Thank you for the answer. What do you mean by "made them up"? It seems to me this is the result of tf structure from rea |
| 2022-10-15 15:28:13 -0500 | commented answer | Clarification about relative orientation of UR5 Thank you for the answer. What do you mean by "made them up"? It seems to me this is the result of tf structure from rea |
| 2022-10-15 10:27:10 -0500 | received badge | ● Popular Question (source) |
| 2022-10-14 16:35:59 -0500 | asked a question | Clarification about relative orientation of UR5 Clarification about relative orientation I'm trying to understand the relative position and orientation. Take a look at |
| 2022-10-12 16:40:42 -0500 | received badge | ● Popular Question (source) |
| 2022-10-12 16:38:44 -0500 | marked best answer | How to get last frame's pose relative to base frame I'm wondering if |
| 2022-10-12 16:38:08 -0500 | received badge | ● Famous Question (source) |
| 2022-10-07 16:51:16 -0500 | asked a question | Simple way to add a fixed frame to tf Simple way to add a fixed frame to tf I'm running Husky Clearpath mobile robot and apparently there is no fixed frame (i |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
 .
.