The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-07-16 09:51:57 -0500 | received badge | ● Good Question (source) |
| 2022-04-30 13:48:51 -0500 | received badge | ● Nice Question (source) |
| 2022-03-20 09:34:58 -0500 | received badge | ● Famous Question (source) |
| 2021-10-13 18:43:30 -0500 | received badge | ● Nice Question (source) |
| 2021-06-16 09:07:45 -0500 | received badge | ● Student (source) |
| 2020-07-09 02:31:34 -0500 | received badge | ● Famous Question (source) |
| 2020-05-31 07:52:52 -0500 | received badge | ● Famous Question (source) |
| 2020-03-14 06:10:45 -0500 | received badge | ● Famous Question (source) |
| 2020-03-12 13:46:41 -0500 | marked best answer | Weird behavior of GDB with roslaunch I am trying to debug a ROS project which is started by the followinng (simplified) launch file. When the launch file is executed with However, when I try to type project.launchOutput |
| 2020-03-12 13:41:36 -0500 | received badge | ● Notable Question (source) |
| 2020-02-20 08:10:46 -0500 | received badge | ● Notable Question (source) |
| 2020-02-03 12:39:46 -0500 | received badge | ● Famous Question (source) |
| 2020-01-27 12:27:14 -0500 | received badge | ● Famous Question (source) |
| 2020-01-05 23:57:27 -0500 | received badge | ● Notable Question (source) |
| 2019-12-07 13:35:40 -0500 | commented question | RViz unable to find transform to map and odom frame @Choco93 Can I ask why having odometry in the middle of the tree doesn't make sense? I am having this problem where my r |
| 2019-12-06 09:10:01 -0500 | received badge | ● Notable Question (source) |
| 2019-12-03 22:34:56 -0500 | marked best answer | What is the mathematical relationship between parent and child frame in tf? I am very confused by the coordinate frame in this tutorial. In this command line syntax
|
| 2019-12-03 02:34:45 -0500 | received badge | ● Popular Question (source) |
| 2019-12-02 15:35:08 -0500 | commented answer | What is the mathematical relationship between parent and child frame in tf? @stevemacenski I am trying to do it myself right now. But I was just hoping that someone who is an expert like you can p |
| 2019-12-02 15:29:24 -0500 | commented answer | What is the mathematical relationship between parent and child frame in tf? @stevemacenski I am trying to do it myself right now. But I was just hoping that someone who is an expert like you can p |
| 2019-12-02 15:27:23 -0500 | commented answer | What is the mathematical relationship between parent and child frame in tf? I am trying to do it myself right now. But I was just hoping that someone who is an expert like you can point it out. |
| 2019-12-02 15:26:57 -0500 | commented answer | What is the mathematical relationship between parent and child frame in tf? I am trying to do it myself right now. But I was just hoping that someone who is expert like you can point it out. |
| 2019-12-02 15:26:26 -0500 | commented answer | What is the mathematical relationship between parent and child frame in tf? I am trying to do it myself right now. But I was just hoping that someone who is expert like you can point it out and co |
| 2019-12-02 15:21:05 -0500 | edited question | What is the mathematical relationship between parent and child frame in tf? What is the mathematical relationship between parent and child frame in tf? I am very confused by the coordinate frame i |
| 2019-12-02 15:20:45 -0500 | edited question | What is the mathematical relationship between parent and child frame in tf? What is the mathematical relationship between parent and child frame in tf? I am very confused by the coordinate frame i |
| 2019-12-02 15:07:09 -0500 | edited question | What is the mathematical relationship between parent and child frame in tf? What is the mathematical relationship between parent and child frame in tf? I am very confused by the coordinate frame i |
| 2019-12-02 15:06:25 -0500 | commented answer | What is the mathematical relationship between parent and child frame in tf? Also, is the roll, pitch, yaw in this syntax intrinsic rotation or extrinsic rotation? |
| 2019-12-02 15:05:32 -0500 | commented answer | What is the mathematical relationship between parent and child frame in tf? Thanks for pointing to the document. But could you please (in question 2) let me know which one is the correct mathemati |
| 2019-12-02 15:01:46 -0500 | commented answer | What is the mathematical relationship between parent and child frame in tf? Thanks for pointing to the document. But could you please (in question 2) let me know which one is the correct mathemati |
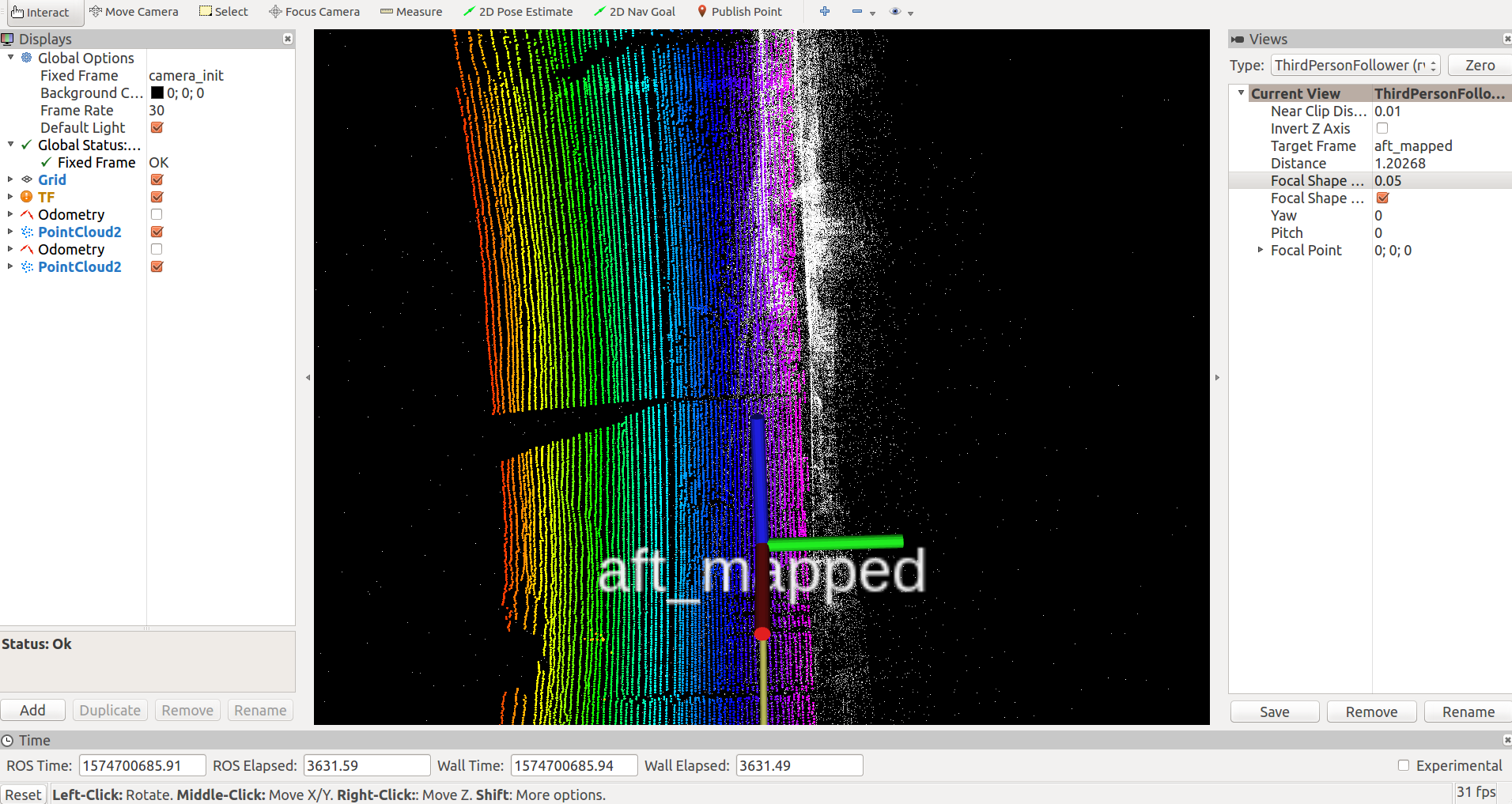
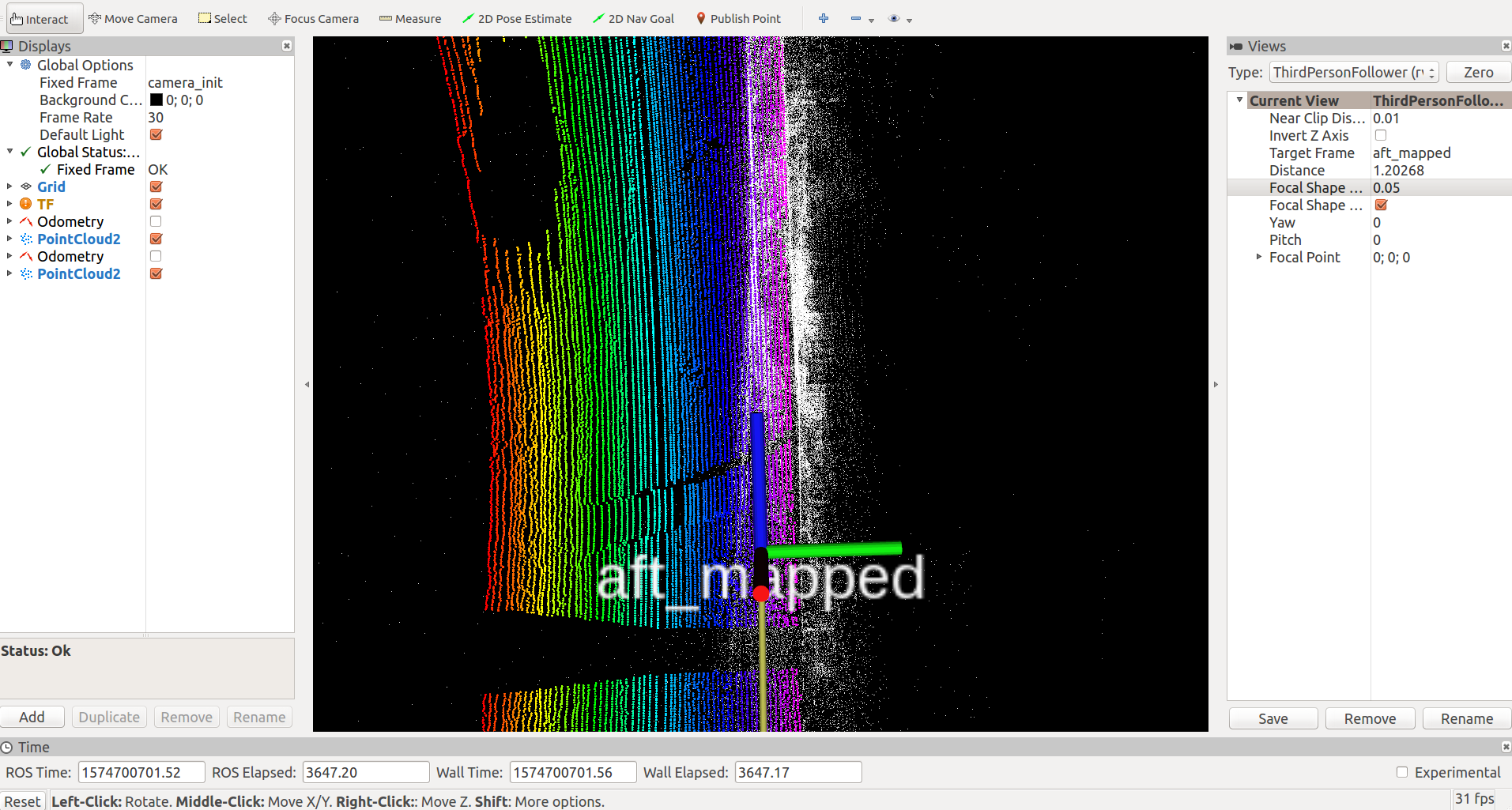
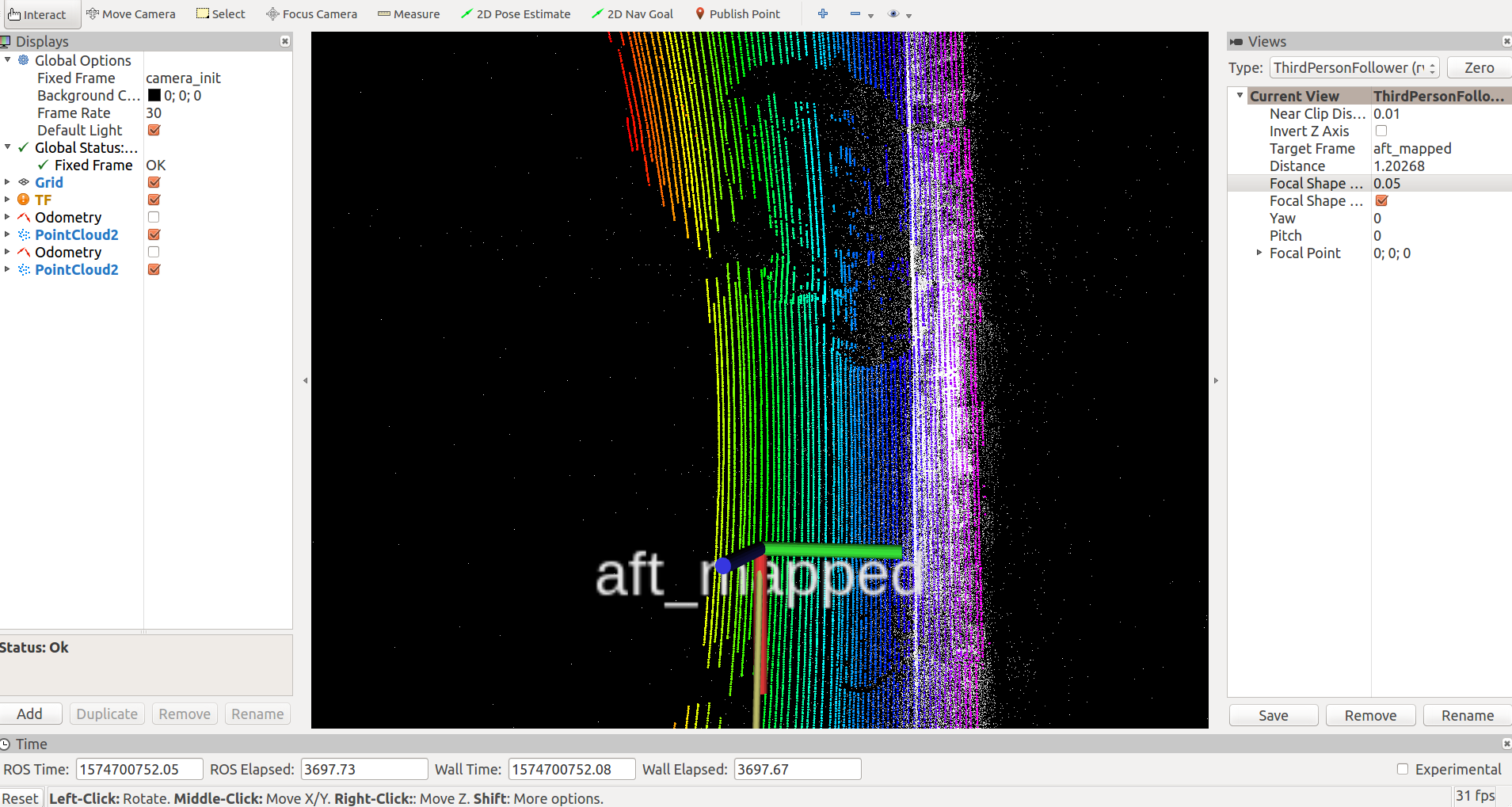
| 2019-12-02 14:44:37 -0500 | marked best answer | Rviz camera in ThirdPersonFollower view doesn't align correctly Environment
Issues
What could be the possible reasons of this? Is this a known bug? Here is some of the screenshots:
|
| 2019-12-02 14:44:15 -0500 | received badge | ● Popular Question (source) |
| 2019-12-02 14:43:47 -0500 | edited question | What is the mathematical relationship between parent and child frame in tf? What is the mathematical relationship between parent and child frame in tf? I am very confused by the coordinate frame i |
| 2019-12-02 14:42:39 -0500 | edited question | What is the mathematical relationship between parent and child frame in tf? What is the mathematical relationship between parent and child frame? I am very confused by the coordinate frame in this |
| 2019-12-02 14:41:46 -0500 | edited question | What is the mathematical relationship between parent and child frame in tf? What is the mathematical relationship between parent and child frame? I am very confused by the coordinate frame in this |
| 2019-12-02 14:40:54 -0500 | edited question | What is the mathematical relationship between parent and child frame in tf? What is the mathematical relationship between parent and child frame? I am very confused by the coordinate frame in this |
| 2019-12-02 14:40:26 -0500 | asked a question | What is the mathematical relationship between parent and child frame in tf? What is the mathematical relationship between parent and child frame? I am very confused by the coordinate frame in this |
| 2019-11-26 13:13:06 -0500 | commented question | Rviz camera in ThirdPersonFollower view doesn't align correctly @Weasfas I think I have found the solution from this post. I need to set both Fixed Frame and Target Frame to the same f |
| 2019-11-26 13:13:06 -0500 | received badge | ● Commentator |
| 2019-11-26 12:59:05 -0500 | commented question | Rviz camera in ThirdPersonFollower view doesn't align correctly @Weasfas Thanks! I think I misunderstood the ThirdPersonFollower view typeThe document says that n ThirdPersonFollower, |
| 2019-11-26 09:48:43 -0500 | commented question | Rviz camera in ThirdPersonFollower view doesn't align correctly @Weasfas Thanks! It turns out that I misunderstood the ThirdPersonFollower view type; I was too quick when "seeking" inf |
| 2019-11-26 06:45:13 -0500 | edited answer | rviz zooming center It is called Focal Point, which can be set on the panel on the right side of rviz. |
| 2019-11-26 06:44:55 -0500 | marked best answer | rviz zooming center I am running a ROS project, publising topics, and viewing in The plot seems to rotate around this yellow point when I use left click on Could you please point me out what is this yellow point? If this is the zooming center, how can I make this coincide with the robot's camera frame? |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.