The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2021-08-29 21:44:51 -0500 | received badge | ● Famous Question (source) |
| 2021-04-16 12:20:52 -0500 | received badge | ● Notable Question (source) |
| 2021-04-16 12:20:52 -0500 | received badge | ● Popular Question (source) |
| 2021-03-15 16:55:02 -0500 | received badge | ● Student (source) |
| 2020-07-14 15:17:31 -0500 | received badge | ● Famous Question (source) |
| 2020-06-24 00:15:38 -0500 | received badge | ● Famous Question (source) |
| 2020-03-08 04:19:24 -0500 | received badge | ● Famous Question (source) |
| 2020-03-02 05:03:40 -0500 | received badge | ● Famous Question (source) |
| 2020-01-24 08:20:48 -0500 | received badge | ● Notable Question (source) |
| 2020-01-15 06:55:23 -0500 | received badge | ● Popular Question (source) |
| 2020-01-06 13:59:54 -0500 | received badge | ● Famous Question (source) |
| 2019-12-30 06:56:47 -0500 | edited question | Gazebo freezes when inserting a custom model. Gazebo freezes when inserting a custom model. When I'm trying to insert a custom model (I've tried few of them) in forma |
| 2019-12-30 06:54:07 -0500 | edited question | Gazebo freezes when inserting a custom model. Gazebo freezes when inserting a custom model. When I'm trying to insert a custom model (I've tried few of them) in forma |
| 2019-12-30 06:54:07 -0500 | received badge | ● Associate Editor (source) |
| 2019-12-30 06:53:18 -0500 | asked a question | Gazebo freezes when inserting a custom model. Gazebo freezes when inserting a custom model. When I'm trying to insert a custom model (I've tried few of them) in forma |
| 2019-12-15 05:38:48 -0500 | received badge | ● Notable Question (source) |
| 2019-12-15 05:38:48 -0500 | received badge | ● Popular Question (source) |
| 2019-12-06 08:58:03 -0500 | received badge | ● Famous Question (source) |
| 2019-12-06 08:58:03 -0500 | received badge | ● Notable Question (source) |
| 2019-11-30 11:51:09 -0500 | asked a question | Line intersection Line intersection In my code I am clustering a cloud into many clusters, for each cluster I extract all of the lines. M |
| 2019-11-28 08:05:56 -0500 | received badge | ● Notable Question (source) |
| 2019-11-27 11:23:47 -0500 | received badge | ● Popular Question (source) |
| 2019-11-23 10:53:23 -0500 | marked best answer | Vibrating point cloud in rviz.
So as you can see on the code I'm creating two subscribing nodes:
In this code I'm using My problem is that when I'm publishing it to RVIZ i can see some kind of vibrations of the subscribed Ubuntu:18.04 LTS / ROS: Melodic |
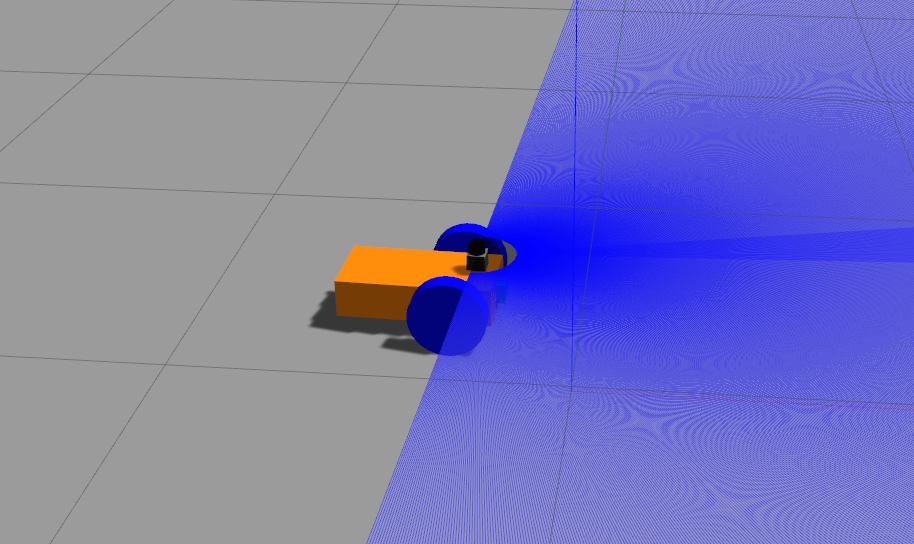
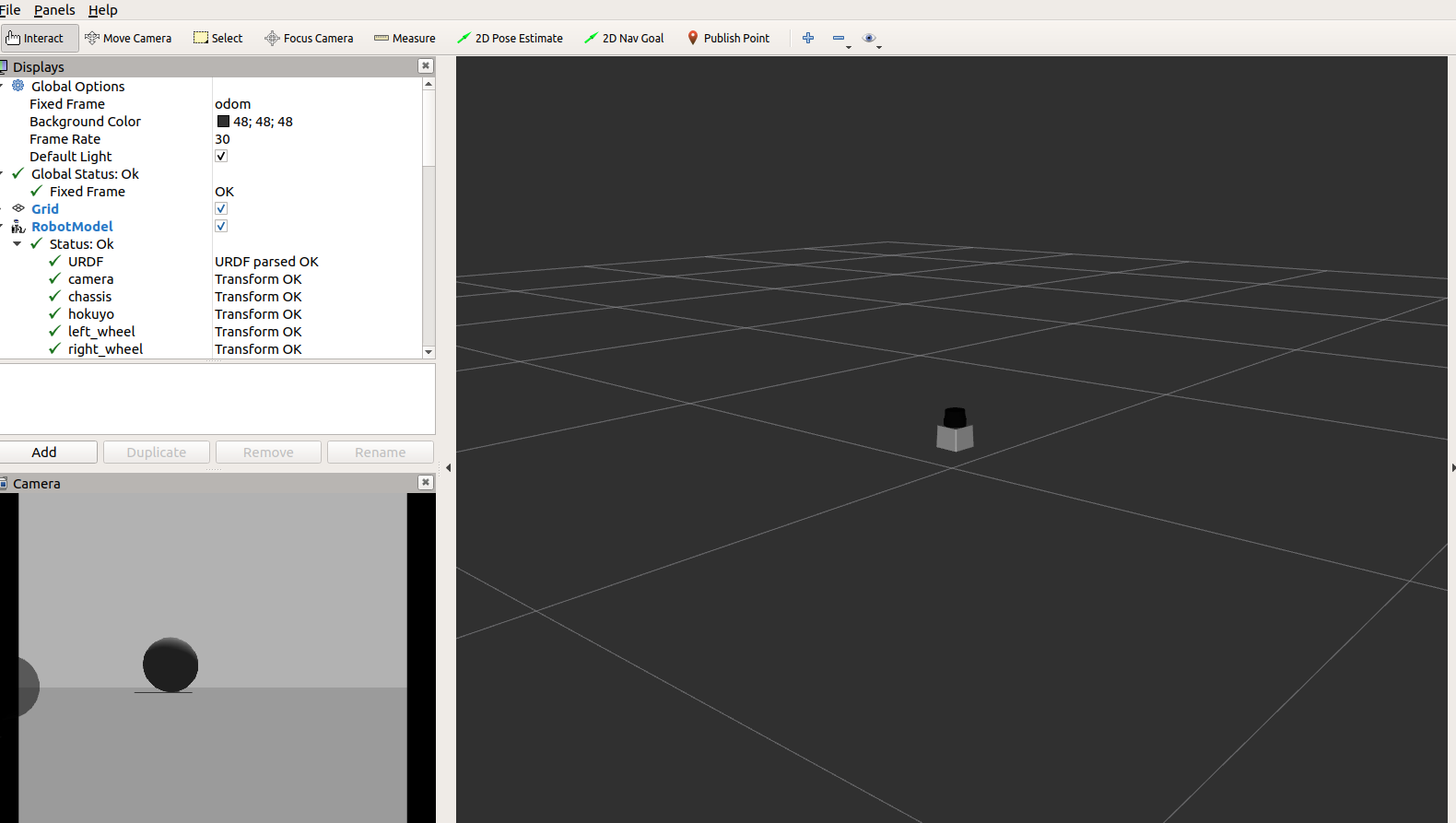
| 2019-11-23 09:46:46 -0500 | marked best answer | Invisible robot model in Rviz. Hello, I'm new to rviz and I encountered a problem while i was trying to run project from this repo . When im working on Gazebo i can see a whole model of the robot but when i try to do the same on Rviz i can see only laser scanner model.
Full code is available HERE. The only thing I've changed is when i was trying to run for example gazebo i had errors which were saying that something is wrong with mybot.xacro, I've changed the type of point separated values were typed from to end everything work fine except the thing i cant see the model in Rviz. I'm working on Ubuntu 18.05 LTS |
| 2019-11-23 09:45:42 -0500 | asked a question | ImportError: libpcl_keypoints.so.1.7: cannot open shared object file: No such file or directory ImportError: libpcl_keypoints.so.1.7: cannot open shared object file: No such file or directory I'm trying to use PCL li |
| 2019-11-23 07:52:27 -0500 | commented answer | Vibrating point cloud in rviz. @tfoote Everything work's perfectly, you can post your comment as an answer and I'll mark it. Thank you for your time an |
| 2019-11-22 15:16:35 -0500 | received badge | ● Notable Question (source) |
| 2019-11-22 03:02:07 -0500 | edited answer | Vibrating point cloud in rviz. The problem was that both /gazebo and /robot_state_publisher were publishing /tf and my callback for /tf subscribing nod |
| 2019-11-22 02:42:44 -0500 | edited answer | Vibrating point cloud in rviz. The problem was that both /gazebo and /robot_state_publisher were publishing /tf and my callback for /tf subscribing nod |
| 2019-11-22 02:31:20 -0500 | edited answer | Vibrating point cloud in rviz. The problem was that both /gazebo and /robot_state_publisher were publishing /tf and my callback for /tf subscribing nod |
| 2019-11-22 02:24:01 -0500 | commented answer | Vibrating point cloud in rviz. @tfoote I've edited my answer |
| 2019-11-22 02:23:44 -0500 | edited answer | Vibrating point cloud in rviz. The problem was that both /gazebo and /robot_state_publisher were publishing /tf and my callback for /tf subscribing nod |
| 2019-11-22 02:23:29 -0500 | edited answer | Vibrating point cloud in rviz. The problem was that both /gazebo and /robot_state_publisher were publishing /tf and my callback for /tf subscribing nod |
| 2019-11-22 02:22:08 -0500 | edited answer | Vibrating point cloud in rviz. The problem was that both /gazebo and /robot_state_publisher were publishing /tf and my callback for /tf subscribing nod |
| 2019-11-21 06:04:37 -0500 | received badge | ● Popular Question (source) |
| 2019-11-21 05:37:20 -0500 | commented answer | Vibrating point cloud in rviz. Yes, now I can see that /gazebo and /robot_state_publisher nodes are publishing /tf . |
| 2019-11-21 05:37:11 -0500 | commented answer | Vibrating point cloud in rviz. Yes now I can see that /gazebo and /robot_state_publisher nodes are publishing /tf . |
| 2019-11-21 05:36:51 -0500 | commented answer | Vibrating point cloud in rviz. Yes now I can see that /gazebo and /robot_state_publisher are publishing /tf . |
| 2019-11-21 05:23:11 -0500 | commented answer | Vibrating point cloud in rviz. I've figured out that when i echo the /tf without rviz turned on it shows how x, y, z and rotation changes but when i tu |
| 2019-11-21 02:10:19 -0500 | edited answer | Vibrating point cloud in rviz. I've found the problem, this node in RViZ.launch file was causing this. <node name="robot_state_publisher" pkg="robo |
| 2019-11-21 01:57:38 -0500 | edited answer | Vibrating point cloud in rviz. I've found the problem, this node in RViZ.launch file was causing this. <node name="robot_state_publisher" pkg="robo |
| 2019-11-21 01:57:27 -0500 | edited question | Vibrating point cloud in rviz. Vibrating point cloud in rviz. So as you can see on the code I'm creating two subscribing nodes: Subscribing from la |
| 2019-11-21 01:41:55 -0500 | edited answer | Vibrating point cloud in rviz. I've found the problem, this node in RViZ.launch file was causing this. <node name="robot_state_publisher" pkg="robo |
| 2019-11-21 01:23:16 -0500 | commented answer | Vibrating point cloud in rviz. I needed to extract laser_scan in order to transform it into the other frame so i can apply an algorithm in python to th |
| 2019-11-21 01:23:16 -0500 | received badge | ● Commentator |
| 2019-11-20 15:34:22 -0500 | answered a question | Vibrating point cloud in rviz. I've found the problem, RViZ was causing these vibrations but I don't know why... |
| 2019-11-20 15:34:22 -0500 | received badge | ● Rapid Responder (source) |
| 2019-11-20 09:49:02 -0500 | edited question | Vibrating point cloud in rviz. Vibrating point cloud in rviz. So as you can see on the code I'm creating two subscribing nodes: Subscribing from la |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.